一种基于熵函数的合作频谱感知方法
2021-02-24任梦梦胡燕妃翟旭平
任梦梦, 胡燕妃, 翟旭平
(上海大学特种光纤与光接入网重点实验室, 上海 200444)
随着通信技术的飞速发展, 无线频谱被广泛应用于广播、卫星、军事等通信系统中.研究表明, 已授权频段利用率为15%∼80%, 未授权频段则日渐短缺[1].认知无线电(cognitive radio, CR)[2]作为一个智能无线通信技术, 能够智能地发现可用空闲频谱供用户使用, 从而提高频谱利用率.频谱感知(spectrum sensing, SS)是CR 的核心技术, 通过次级用户(secondary user, SU)节点检测兴趣频段上是否存在主用户(primary user, PU), 以判断是否有可用的空闲频谱.因此, 提高频谱感知性能可以有效地提高频谱利用率.
多节点合作感知可用于提高频谱感知的性能.传统的合作感知方法有硬判决准则AND,OR 和Majority, 以及软判决准则最大比合并(maximal radio combination, MRC)和等增益合并(equal gain combination, EGC)等[3].为了降低系统感知开销, 张学军等[4]提出了一种基于信噪比筛选的合作感知方法, 优先选择可靠性较强的SU 参与感知, 但该方法没有考虑到除接收信噪比以外的采样点数、接收天线数、地理位置等其他因素, 而在实际的频谱感知中, 上述因素均能影响SU 的感知性能.这种采样点数、接收信噪比、地理位置等多种性能影响因素互不相同的一系列节点, 称为异构节点.近年来, 关于异构节点的合作感知方法相继被提出.Yang等[5]针对天线数目、采样点数和接收信噪比不同的异构节点, 提出了一种基于对数似然比的检测算法, 该算法有效地提高了异构节点检测性能, 但要求各节点具有足够大的样本, 且仅适用于天线数目、采样点数及接收信噪比不同的异构节点.Zhang等[6]针对地理位置不同的异构节点, 提出了二维感知节点选择融合(two-dimensional sensing nodes selective fusion,TDSNSF)方案, 该方案先对各SU 进行位置估计, 再根据各SU 与PU 和融合中心的距离以及各SU 的检测概率进行两轮筛选, 仅允许最终筛选得到的节点进行合作感知, 从而降低感知开销, 但TDSNSF 仅在异构节点的其他特性均相同, 仅空间位置不同时才能获得较高的检测性能.综上可以看到, 上述研究提出的方法仅适用于指定性能影响因素不同的情况, 当其他性能影响因素不同时则不适用.此外, 大部分研究均假设感知信道为理想的加性高斯白噪(additive white Gaussian noise, AWGN)信道或仅经历多径衰落[7].而实际的感知信道不仅会经历多径衰落, 还会受到阴影衰落的影响.无线通信中用Rice-lognormal 及Nakagami-lognormal 等复合衰落模型表示多径与阴影共存的信道[8], 但它们均依赖于对数正态分布的阴影模型, 计算复杂且不能得到闭合解.Rasheed等[9]表明, 由Nakagami 多径和Gamma 阴影组成的Nakagamigamma(KG)复合衰落模型可解决上述问题, 更符合实际的频谱感知环境.然而, 目前关于异构节点在KG 衰落信道下合作感知的报道较为少见.
熵的思想在许多学科中都有应用, 如数学[10]和物理学[11]等.Ge等[12]和Aygun等[13]分别将熵应用于认知无线电中, 通过基于熵的加权函数寻找可用信道的优先级.因此, 本工作针对异构节点在KG 衰落信道下的感知场景, 提出了一种基于熵函数(based on entropy function,BEF)的合作感知方法.本方法将异构节点的性能影响因素作为评价指标, 在节点参与感知之前, 熵函数根据这些指标计算各节点的综合评价得分, 然后筛选出综合评价得分较高的节点参与最终的感知与判决.BEF方法适用于任意多种性能影响因素不同的异构节点, 仿真结果表明, 本方法在降低系统感知开销的同时提高了全局检测概率.
1 系统模型
1.1 信号模型
本工作采用集中式合作频谱感知网络, 整个网络包含N个异构节点作为次级用户、一个主用户节点以及一个融合中心(fusion center, FC).SUn表示第n个SU(见图1).假设PU 和SU 均只有单个传输天线, 第n个SU 的采样点数为Mn,H0表示PU 不存在,H1表示PU 存在, 则SUn对PU 的感知可表示为二元假设模型, 有

图1 异构节点的集中式合作频谱感知网络Fig.1 Centralized cooperative spectrum sensing network of heterogeneous nodes
式中:n为SU 索引;m为样本索引;yn(m)为SU 实际接收到的信号;s(m)为PU 的发射信号;wn(m)是均值为0、方差为σ2wn(m)的加性高斯白噪声, 假设s(m)与wn(m)相互独立;hn为PU 和SUn间的信道增益, 与PU 发射功率及SUn的位置有关.定义SUn的平均接收信噪比为为SUn的瞬时接收信噪比,Ps为PU 的发射功率.
能量检测的复杂度低、易于实现, 被广泛用于复杂衰落信道下的频谱感知[7-9,14].为精确地量化本地感知数据并消除噪声方差的影响, 采用标准化能量检测算法, 则SUn的检测统计量Tn为[5]

AWGN 信道模型是目前频谱感知研究中常用的噪声干扰模型.由式(2)可得, AWGN 信道下SUn的虚警概率Pf,AWGN,n和检测概率Pd,AWGN,n分别为

式中:λn表示判决门限;分别为Gamma函数和不完全Gamma 函数;为u阶广义Marcum-Q函数.
将三相逆变器等效模型通过坐标变换得到d-q轴下的等效受控源模型[14],根据逆变电路等效关系求得逆变器-电机系统归算到直流端等效的开环阻抗为:
1.2 KG 衰落信道模型
在实际的感知环境中, 无论感知信道中有无直视路径(line of sight, LOS), 均可建模为由Nakagami 多径和Gamma 阴影组成的KG 复合衰落模型.KG 衰落下单个SU 的瞬时接收信噪比γ服从分布[15]

式中:p,q为KG 信道参数;表示第二类修正贝塞尔函数.
KG 衰落模型中, 不同的p,q值可以描述不同的信道模型[16].例如: 当q →∞时,f(γ)近似为Nakagami-m多径衰落模型; 当p= 1 时,f(γ)近似为Rayleigh-Lognormal 衰落模型;当p →∞且q →∞时,f(γ)近似为AWGN 信道模型.
KG 衰落信道中, SUn的虚警概率Pf,n和检测概率Pd,n可表示为
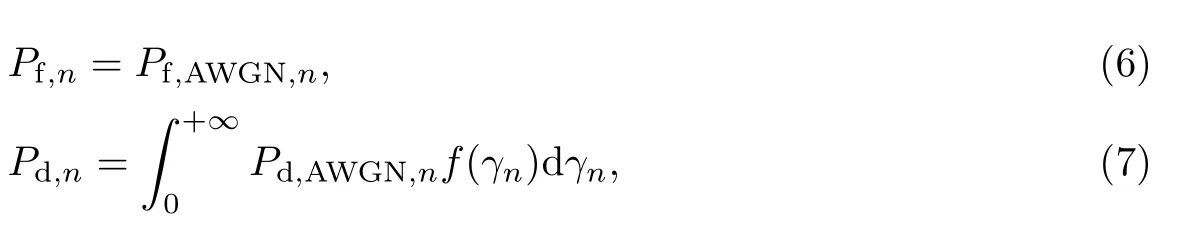
式中:f(γn)为SUn的KG 分布.
2 基于熵函数的合作频谱感知方法
在实际的频谱感知环境中, 不同SU 的接收信噪比、采样点数及地理位置等因素影响各不相同, 使得各SU 的感知可靠性各不相同.本工作提出的BEF 合作感知方法主要过程如下.
(2) 本地感知.由过程(1)筛选得到的SU 先在本地进行标准化能量检测和判决, 再将本地判决结果0 或1(0 表示PU 不存在, 1 表示PU 存在)发送至FC.
(3) 融合判决.FC 采用OR 准则融合接收到的所有判决结果, 得到最终的判决结果.
2.1 基于熵函数的综合评价及节点筛选
选取J项性能影响因素作为评价指标, 用于反映SU 的感知可靠性.SU 及其对应的评价指标如表1 所示, 其中xnj(n=1,2,··· ,N,j=1,2,··· ,J)表示SUn的第j项评价指标的值.
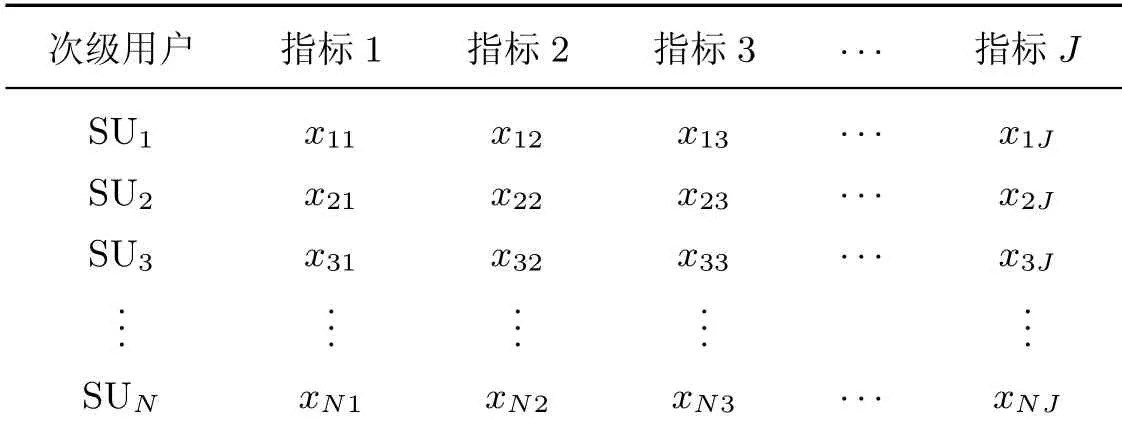
表1 次级用户的评价指标Table 1 Evaluation indicators of secondary user
各项评价指标的计量单位并不统一, 且正向指标和负向指标数值代表的含义不同, 其中正向指标数值越大越好, 负向指标数值越小越好.因此, 采用不同的算法对正、负向指标进行标准化处理, 用表示标准化处理后的xnj, 具体处理方法如下:

第j项评价指标下, SUn占比为

第j项评价指标的熵值为

由第j项评价指标的熵值ej可求得该指标的权值为

则SUn的综合评价得分为

定义最终被选择参与感知的SU 的最大数目为L(1 ≤L≤N), 综合评价得分较大的前L个SU 将被通知进行本地感知.
2.2 本地感知
首先, 经过熵函数筛选得到的前L个SU 在本地进行标准化能量检测和判决, 若在被检测频段上发现PU 信号, 则生成判决结果1, 否则生成判决结果0; 然后, 将生成的判决结果0 或1 发送至FC.由式(3)∼(7)可得, KG 衰落信道下第l(l= 1,2,··· ,L)个SU 的虚警概率Pf,l和检测概率Pd,l分别为

定义PU 存在和不存在的先验概率分别为PH1和PH0, 则第l个SU 在KG 衰落信道下的错误检测概率为

2.3 融合判决
FC 接收到L个SU 的判决结果后, 采用OR 准则进行最终的融合判决.KG 衰落信道下BEF 合作感知方法的全局虚警概率Qf和全局检测概率Qd分别为

3 数值仿真与分析
本工作使用MATLAB 仿真, 定义如下: 次级节点SU 到主用户PU 的距离为ds,p, 到融合中心FC 的距离为ds,f;N个SU 的全局平均接收信噪比为最大参与感知节点数为L(1 ≤L≤N).设Zhang等[6]给出的TDSNSF 方法的距离门限为Dp, 当ds,p≤Dp时,对应SU 才能发送感知结果给FC, 然后进入下一步筛选, 否则不能发送感知信息给FC.假设PU 存在和不存在的先验概率PH1=PH0= 0.5, 各个SU 到PU 的距离ds,p、到FC 的距离ds,f及各SU 的采样点数M均在[1, 50]内随机获取.
图2 给出了单节点的检测性能、平均接收信噪比、采样点数M以及KG 参数p,q的关系.由图2(a)可知: SU 的检测概率Pd始终随着和M的增大而增大; 错误检测概率Pe随着和M的增大而减小.因此, 本工作选取平均接收信噪比、采样点数M为正向评价指标.由图2(b)可知: 当约大于−2 dB 时,Pd随着p,q的增大而增大; 而当约小于−2 dB 时,Pd随着p,q的增大而降低.因此, KG 参数p,q不适合作为评价指标.在实际感知环境中,各SU 的ds,p和ds,f一般互不相同, 且ds,p和ds,f越小, SU 的感知性能越好[6].因此, 本工作选取ds,p,ds,f作为负向评价指标.

图2 单节点在采样点数M 及KG 参数p, q 不同时的性能比较Fig.2 Performance comparison of single node with different samples M and KG parameters p, q
图3 给出了AND, OR, TDSNSF 以及BEF 方法的操受者操作特性(receiver operating characteristic, ROC)曲线.由图3(a)可知, 当全局平均接收信噪比一定时, BEF 方法最优,AND 准则最差, OR 准则优于TDSNSF 方法.这是因为TDSNSF 方法仅根据各SU 的ds,p和ds,f进行节点筛选, 不考虑各SU 的接收信噪比γ和采样点数M的影响, 而γ或M较 小的SU 会使TDSNSF 的全局检测性能明显降低.BEF 方法则综合了ds,p,ds,f,和M多种性能影响因素, 最终筛选出综合可信度较高的SU 参与最终的感知与判决, 从而获得较优的检测性能.图3(b)为通过Monte-Carlo 仿真得到的各合作方法的仿真值, 设待检信号为二进制相移键控(binary phase shift keying, BPSK)信号, 仿真次数为5 000 次; 理论值则根据理论公式仿真得到.由图3(b)可以看到, 各方法的理论值与仿真值近似, BEF方法的性能最优, 验证了理论的正确性.

图3 不同合作感知方法的ROC 曲线Fig.3 ROC curves of different cooperative methods
图4 给出了BEF 及TDSNSF 方法的全局检测概率Qd与最终筛选出的SU 最大数目L的关系, 其中N= 20,Pf= 0.01,p= 0.85,q= 18.41,=−5 dB.由图分析可得, BEF 方法的Qd随着L的增大而增大, 且当L≥7 时Qd保持最大值不变.同样, 对于TDSNSF 方法,Qd随着L和距离门限Dp的增大而增大; 当Dp一定且L达到一定值后,Qd保持最大值不变.因此, BEF 和TDSNSF 方法仅选择部分SU 参与感知即能获得最大Qd, 降低了系统的感知开销.但当L一定时, BEF 方法的Qd总是高于TDSNSF.因此, 相比于TDSNSF, BEF 方法在降低感知开销的同时, 提高了感知性能.此外, TDSNSF 先根据各SU 的ds,p进行首次筛选,并计算被选择的SU 的检测概率Pd, 再根据ds,f及Pd再次筛选; 而BEF 方法在感知之前需先根据J项评价指标计算各SU 的综合评价得分, 再根据综合评价得分筛选出参与感知的SU.因此, TDSNSF 的计算复杂度为O(NlogN), BEF 方法的计算复杂度为O(NJ+NlogN),当J 图4 BEF 及TDSNSF 的全局检测概率QdFig.4 Global detection probability Qd of BEF and TDSNSF 图5 对比BEF 及TDSNSF 方法在各SU 的目标虚警概率Pf不同时的全局检测概率Qd,令N=10,L=2,Dp=10,p=0.85,q=18.41, 结果如图5 所示.由图分析可得, 当Pf一定时, BEF 方法的Qd总是高于TDSNSF; 且当Pf= 0.01 及=−6 dB 时, BEF 方法的Qd可达到0.8, 而TDSNSF 的Qd低于0.4.因此, BEF 方法在各SU 的目标虚警概率较低时也能获得较高的全局检测概率. 图5 BEF 及TDSNSF 方法在目标虚警概率Pf 不同时的性能对比Fig.5 Performance comparison of BEF and TDSNSF with different target false alarm probability Pf 本工作考虑异构节点在Nakagami-Gamma 衰落信道下的合作感知场景, 提出了一种基于熵函数的协作感知方法, 本方法将异构节点的性能影响因素(采样点数、接收信噪比、地理位置)作为评价指标, 根据评价指标计算各个节点的综合评价得分, 筛选出综合评价得分较高的节点参与最终的感知与判决, 最后推导了BEF 的全局检测性能表达式.仿真结果表明, 相比于传统的AND, OR 合作准则及选择融合方案TDSNSF, BEF 方法可适用于具有任意多种不同性能影响因素的异构节点, 且有效地降低了系统感知开销, 在各个节点的目标虚警概率较低(Pf<0.1)时, 显著提高了系统的全局检测概率.由于所提方法需将异构节点的所有性能影响因素均发送到融合中心进行处理, 在实际应用中将会增加传输带宽, 因此, 后续的研究中还将对此作出进一步优化.

4 结束语