具有弱耦合无奇异特征的空间移动并联机构及运动学分析*
2021-01-27季晔
季 晔
(洛阳理工学院机械工程学院,河南 洛阳 471023)
0 引言
并联机构具有刚度大、无累计误差、承载能力强等优点,但其输入、输出关系非线性、强耦合、存在奇异性等诸多不利因素也给机构运动学分析、动力学建模和计算带来困难。因此,解耦或弱耦合且无奇异的并联机构是有利于实时控制的,更易于实际应用。
通过理论推导,得出强耦合非线性方程组解析解往往非常困难,因此一些学者尝试利用机构综合方法,设计输入、输出解耦并联机构。文献[1]提出了一种零耦合度且运动解耦的非对称三平移并联机构,并分析了其运动学特征。文献[2]以螺旋理论为基础,综合出解耦的三平移并联机构的各支链,选取其中三个分支组合得到一种具有全局各向同性的新移动解耦机构。文献[3]基于方位特征方程的并联机构拓扑设计理论与方法,提出一种低耦合三平移并联机构。上述文献中的并联机构易于得到输入、输出关系解析表达式,除了三平移并联机构外,具有转动自由度的解耦或弱耦合的三自由度并联机构也有报道,文献[4]设计了一种可实现两平移一转动输出运动的半对称弱耦合并联机构。文献[5]提出的一种新型低耦合度3T1R非全对称并联机构,并进行了刚度性能分析。文献[6]提出一种无耦合二自由度转动并联机构型综合的系统方法。
输入、输出弱耦合或解耦为并联机构实现高精度位置控制奠定了基础,然而,奇异位形的存在同样会影响机构控制效率。本文利用螺旋理论分析一种CRR拓扑结构支链,与其他无约束螺旋的支链结合,设计一种新型弱耦合、无奇异空间移动并联机构。建立机构输入、输出位置关系方程,通过理论推导得出正、逆位置关系的解析表达式。分析机构的工作空间和奇异性,并采用五次多项式对动平台中心进行轨迹规划,得到机构运动学特征和规律。
1 机构构型设计
查阅文献[7]发现,CRR支链可以具有两个约束力偶,拓扑结构如图1所示。
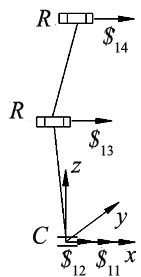
图1 CRR支链结构
图中C表示圆柱副,R表示转动副,在C副处建立笛卡尔坐标系,C副的运动轴线位于x轴,支链的运动螺旋系为:
(1)
其中,N1、N2、N3和N4为非零实数,数值由支链尺度参数决定。
支链的约束螺旋系为:

(2)

(3)
因此,选用两条CRR支链可以约束运动平台三个转动自由度。
对运动平台无约束支链种类较多,根据运动螺旋满秩的要求,典型的支链结构包括SPS、UPS和CPS等。考虑运动灵活性,目前并联机构常采用SPS和UPS支链[8-9]。SPS支链存在一个局部自由度,选取UPS支链作为机构的无约束螺旋驱动支链。
根据修正的Kutzbach-Grübler公式,采用两条拓扑结构相同的CRR支链和一条UPS支链作为驱动支链,机构的自由度为:

(4)
式中,F为机构的自由度数;λ为机构的阶数;n为构件数目;g为运动副数目;fi为第i个运动副的自由度数;ν为去除公共约束后的冗余约束数目;ζ为机构中存在的局部自由度。
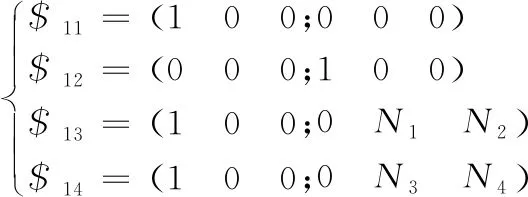
可实现空间三移动自由度,机构简图如图2所示。
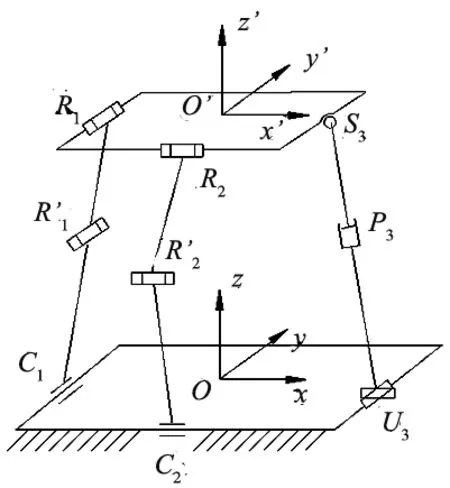
图2 2CRR/UPS并联机构
2 机构输入的选取
机构的奇异性和运动学跟输入的选取密切相关,因此需要先确定机构的驱动[10]。选取C1副、C2副和P3副为驱动副。根据并联机构输入选取原理[11],锁住驱动副,运动平台自由度为零,说明输入选取合理。
在固定平台(地面)上建立固定坐标系O-xyz,C1副和C2副运动轴线平行于{O}坐标系y轴和x轴;U3副运动轴线与x轴和y轴平行。在运动平台中心点建立动坐标系O′-x′y′z′,锁住三个驱动需要三个约束力,在{O}坐标系下,约束力螺旋系为:
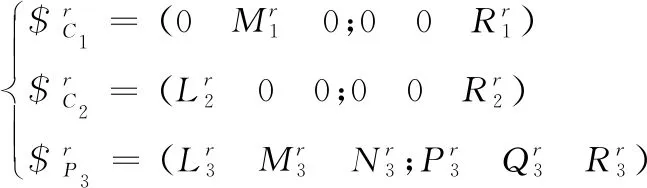
(5)
rank($r)=6
(6)
此时,运动平台不再具有任何移动和转动自由度,说明机构输入选取合理。
3 机构运动学分析与模型建立
(1)位置正、逆解关系方程
C1副和C2副的运动引起运动平台中心点变化,存在:
h1=y
(7)
h2=x
(8)
h1为C1副在{O}坐标系下的位置;h2为C2副在{O}坐标系下的位置。
U3副在{O}坐标系下的矢量是(A3x;A3y;0)T,S3副在{O′}坐标系下的矢量是(a3x;a3y;0)T:
(9)

P为动平台中心点,{O′}坐标系在{O}坐标系下的位置矢量,表示为(x;y;z)T;
a3为S3副在{O}坐标系下的位置矢量。
l3在{O}坐标系下的的矢量表示为:
l3=a3-A3
(10)
UPS支链长度满足:
(11)
式(7)、式(8)和式(11)为机构位置逆解,根据这三个方程可以推导出:
y=h1
(12)
x=h2
(13)
(14)
式(12)~式(14)为机构位置正解。
(2)机构输入、输出速度关系方程
式(7)、式(8)和式(11)对时间求导,得到:
(15)

Jinv为机构速度逆Jacobian矩阵,其为单位阵,即Jinv=I3×3;
Jdir为机构速度正Jacobian矩阵,即:
其中,
(3)机构输入、输出加速度关系方程
式(15)对时间求导,得:
(16)
式(17)为输入、输出加速度关系方程,λ表达式为:
(17)

4 机构奇异性分析
机构的奇异位形可以根据正、逆速度Jacobian是否满秩判定。显然,无论机构处于什么位姿,Jinv满秩。只需要分析Jdir不满秩的情况:
(18)
当z=0时,机构出现奇异。机构在正常运动状态下,此类奇异不会出现,因此可以认为机构不存在奇异。
5 机构工作空间分析
在固定坐标系{O}下,C1副和C2副运动范围均为[-0.5,0.5];l3支链的长度变化范围为[1,1.2]。在动坐标系{O′}下,各铰点位置坐标为R1(-0.3;0;0)T,R2(0;-0.3;0)T,S3(0.3;0;0)T。在固定坐标系{O}下,各铰点初始位置坐标为C1(-0.5;0;0)T,C2(0;-0.4;0)T,U3(0.5;0;0)T,单位为m。机构中心点的工作空间如图3所示。
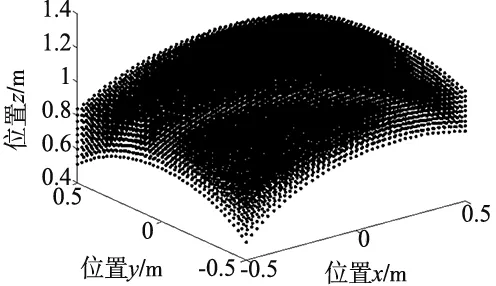
图3 运动平台中心点工作空间
机构工作空间呈球面状,做x-z截面和y-z截面工作区域,如图4所示。
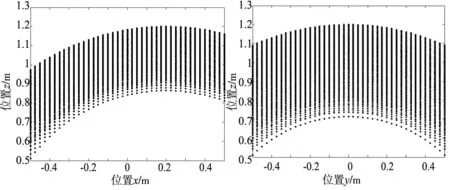
(a) x-z截面(b) y-z截面图4 工作空间截面图
通过工作空间计算发现,区域沿y轴对称分布,连续且无空洞。
6 机构运动学数值计算
在工作空间内,机构运动平台中心点从位置F(0.3;-0.1;0.9)T移动到位置H(0.4;0.1;0.95)T。要求运动时间为5 s,机构的运动初始和终止时刻的速度和加速度均为零,采用5次多项式轨迹,中心点运动方程为:
P=s0+s1t+s2t2+s3t3+s4t4+s5t5
(19)
从初始时刻t0的到终止时刻tf坐标值P(1)、P(2)和P(3)满足:
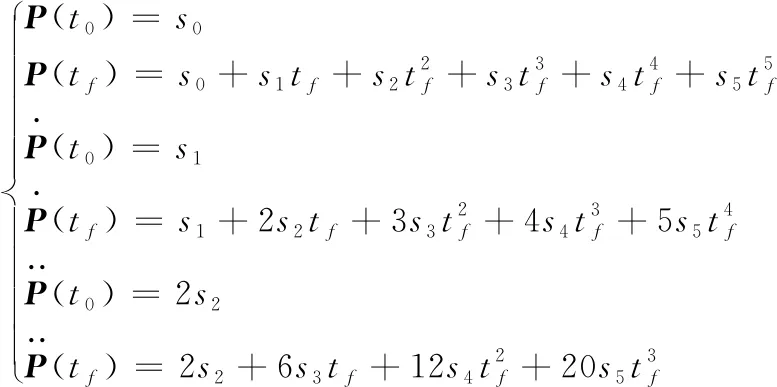
(20)
把F到H点的位置、速度和加速度条件代入式(20),求得运动平台中心点坐标值轨迹方程为:
(21)
将式(21)带入式(11)、式(15)和式(16)分别得到驱动支链l3的长度、速度和加速度变化曲线如图5所示。
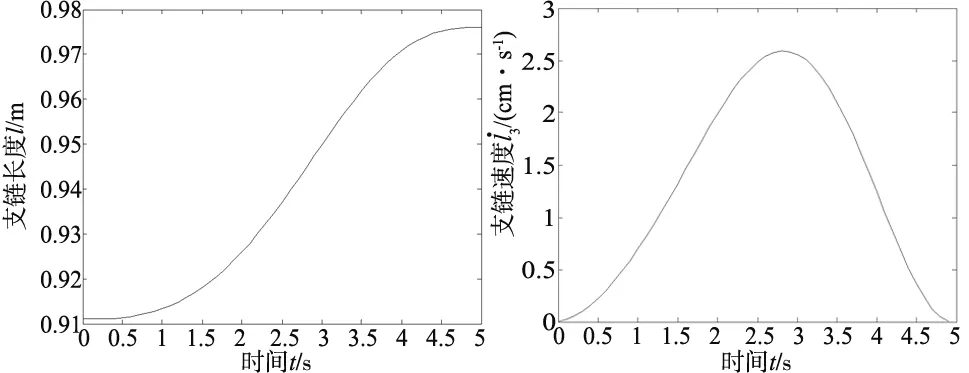
(a) 长度变化曲线 (b) 支链速度变化曲线
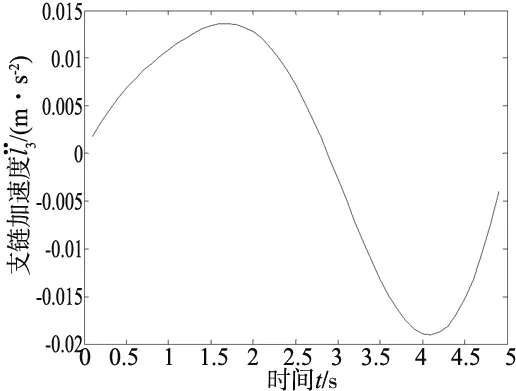
(c) 支链加速度变化曲线图5 支链运动学参数变化曲线
将式(21)带入式(7)、式(8)、式(15)和式(16)分别得到C1副和C2副位置、速度和加速度变化,如图6所示。
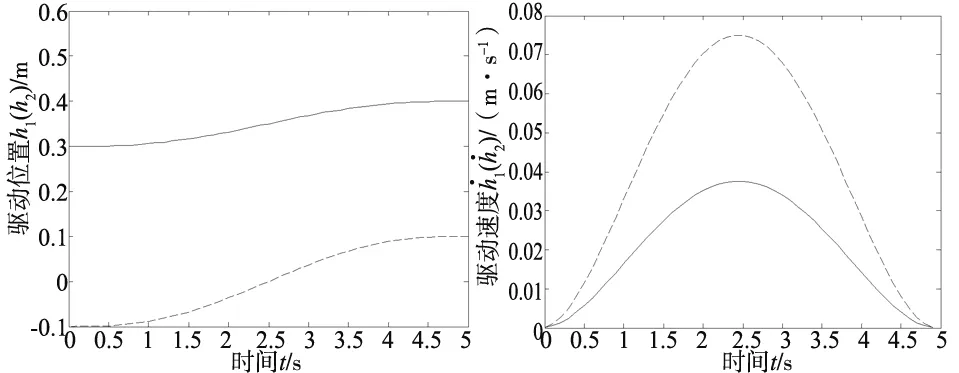
(a) 位置变化曲线(b) 速度变化曲线
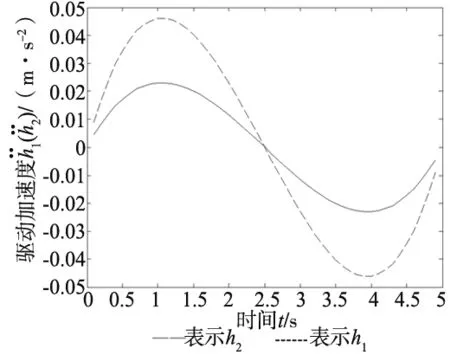
(c) 加速度变化曲线
通过图5和图6发现,中心点以5次多项式曲线运动过程中,机构支链l3逐渐伸长,速度和加速度曲线连续、平滑,符合起始、终止速度和加速度为0,运动过程平稳。C1副和C2副运动轨迹与中心点y坐标和x坐标规划轨迹相同。
7 结论
(1)利用螺旋理论通过对CRR支链分析,结合UPS结构支链,设计了一种新型三平移并联机构。选取各支链输入,证明机构设计和运动的合理性。
(2)分析了机构输入、输出运动关系,推导出运动学正、逆位置解析关系;对机构位置关系方程求导,得到了机构速度关系方程和Jacobian矩阵。机构输入、输出关系部分解耦,通过分析速度Jacobian矩阵,发现机构不存在奇异位形。机构中心点工作空间连续规则,轨迹规划时无需考虑奇异点和空洞的影响。
(3)根据中心点变化条件,采用五次多项式进行轨迹规划,得到了机构输入参数的运动学变化规律。该机构输入、输出运动学关系简单,易于实现精确实时控制。
