直流无刷电机转向与三相布线及霍尔位置传感器的关系分析
2021-01-25成俊康
杨 轩,杨 凡,成俊康,陈 晨
(1.西安地区第一军事代表室,陕西 西安 710025;2.西安航天动力测控技术研究所,陕西 西安 710025)
0 引 言
无刷直流电动机是随着半导体电子技术发展而出现的新型机电一体化电机,是现代电子技术、控制理论和电机技术相结合的产物[1]。无刷直流电动机由电动机和驱动器两部分组成[2],由于运行原理需要,还需要位置传感器,位置传感器检测出转子磁场轴线和定子相绕组轴线的相对位置,进而将信号传递给控制器,控制器依据此信号决定当下时刻相绕组的通电状态[3-5],相绕组通电后,产生磁场,推动转子的旋转。
1 问题描述
通常,电机需求方会指定电机转向以及电机在指定转向时对应的相绕组电流流向和真值表,电机设计者按照需求进行设计,这样就能保证电机产品与配套控制器对接时输出转向符合要求。但现实中,往往会出现实际转向与需求相反,这在很大程度上是因为电机设计者没有将真值表、相绕组电流流向转化为电机设计时需要考虑的因素,特别是电机需求方有时会要求电机引出线在输出轴一端,或电机引出线在非出轴一端时,并且如果再将电机双备份考虑进去,情况会更加复杂,往往让人费解。因此,本文将从电机引出线位置出发,借助实例,探讨电机转向与三相布线、霍尔位置传感器的关系,并引出电机在有双备份要求时,如何梳理电机转向与三相布线、霍尔位置传感器的关系。
2 电机转向与三相布线及霍尔位置传感器的关系分析
首先分析电机需求方规定的电机转向(本文中提到的转向如果没有说明都是从输出轴端看的方向)、相绕组电流流向、真值表的具体含义。举例说明,要求电机顺时针转动时,真值表需求如表1所示。
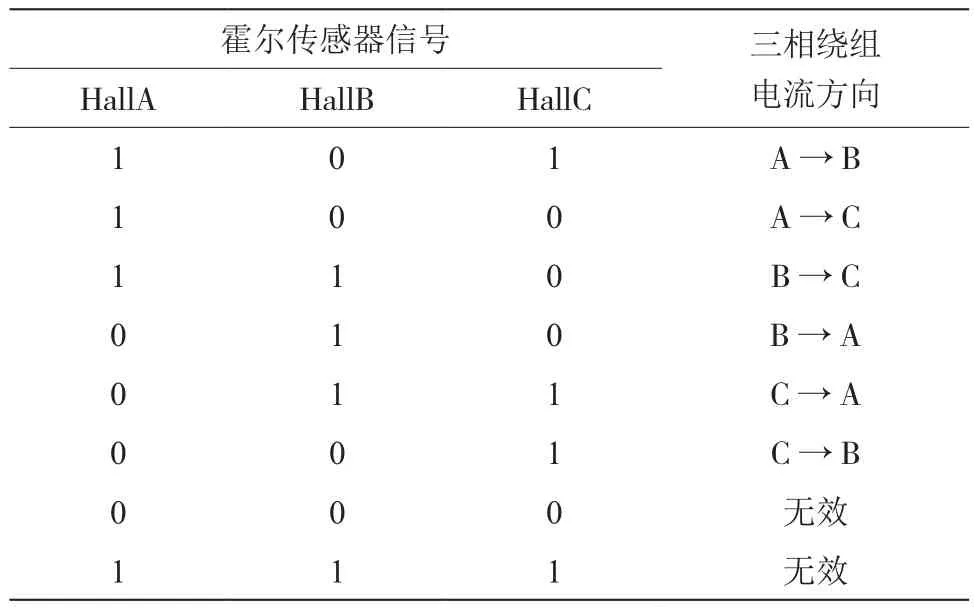
表1 顺时针转动真值表
从表1中可以看出,霍尔传感器总共输出6组有效的状态信号,每组状态信号包含3个霍尔HallA、HallB、HallC的信号,控制器接收到某1组状态信号,就会按照预先约定好的逻辑控制对应相绕组的导通。例如,当霍尔传感器状态信号为011时,控制器接收到此信号后,会开通或关断部分开关管,使得C→A(CA)两相绕组通电,电流从C相绕组起头流入,从A相绕组流出。CA两相绕组通电时,就会在电机定转子气隙中产生磁场,该磁场对电机转子中永磁体会产生力的作用,从而带动转子转动。当转子转动时,霍尔传感器会依次循环输出6组状态信号101→100→110→010→011→001,控制器也会依次循环接收到此信号,然后按照预先约定好的逻辑依次循环控制对应相绕组AB→AC→BC→BA→CA→CB的导通,因此电机定转子气隙间就会产生循环的步进式旋转磁场,如果此时的旋转磁场方向正好是顺时针旋转,电机转子就会顺时针转动,使得电机实际运行方向与需求方向一致。
电机需求方规定的电机旋转方向都以从输出轴端看时为基准,而电机三相布线的实际操作都以电机引出线为参考方向。因此,当电机引出线与输出轴端一致或者不一致时,电机设计者按照需求方规定的旋转方向进行电机三相布线设计,并将布线设计传递给下游操作者时就会有一定的差别。
2.1 电机引出线指定在非出轴端
电机引出线指定在非出轴端,电机按照AB→AC→BC→BA→CA→CB顺序依次导通时,电机顺时针转动。由此可以推断出,电机三相ABC布线完成后,从电机引出线端看,电机ABC三相形成的磁动势轴线是逆时针旋转分布的,并且电角度相位相差120°。
如果三相绕组按照该工艺指导进行下线,则可以推导出三相绕组A→B→C的磁动势轴线是按照逆时针分布的(从出线端视之)。
具体分析为,控制器按照表1的逻辑决定当下时刻绕组的导通,即控制器接收位置传感器的某1组状态信号,按照预先设定的逻辑导通三相绕组对应的两相绕组,电机的实际旋转方向应与需求方向一致。图1为10P12S电机转向分析图图(电机引出线指定在非出轴端)。
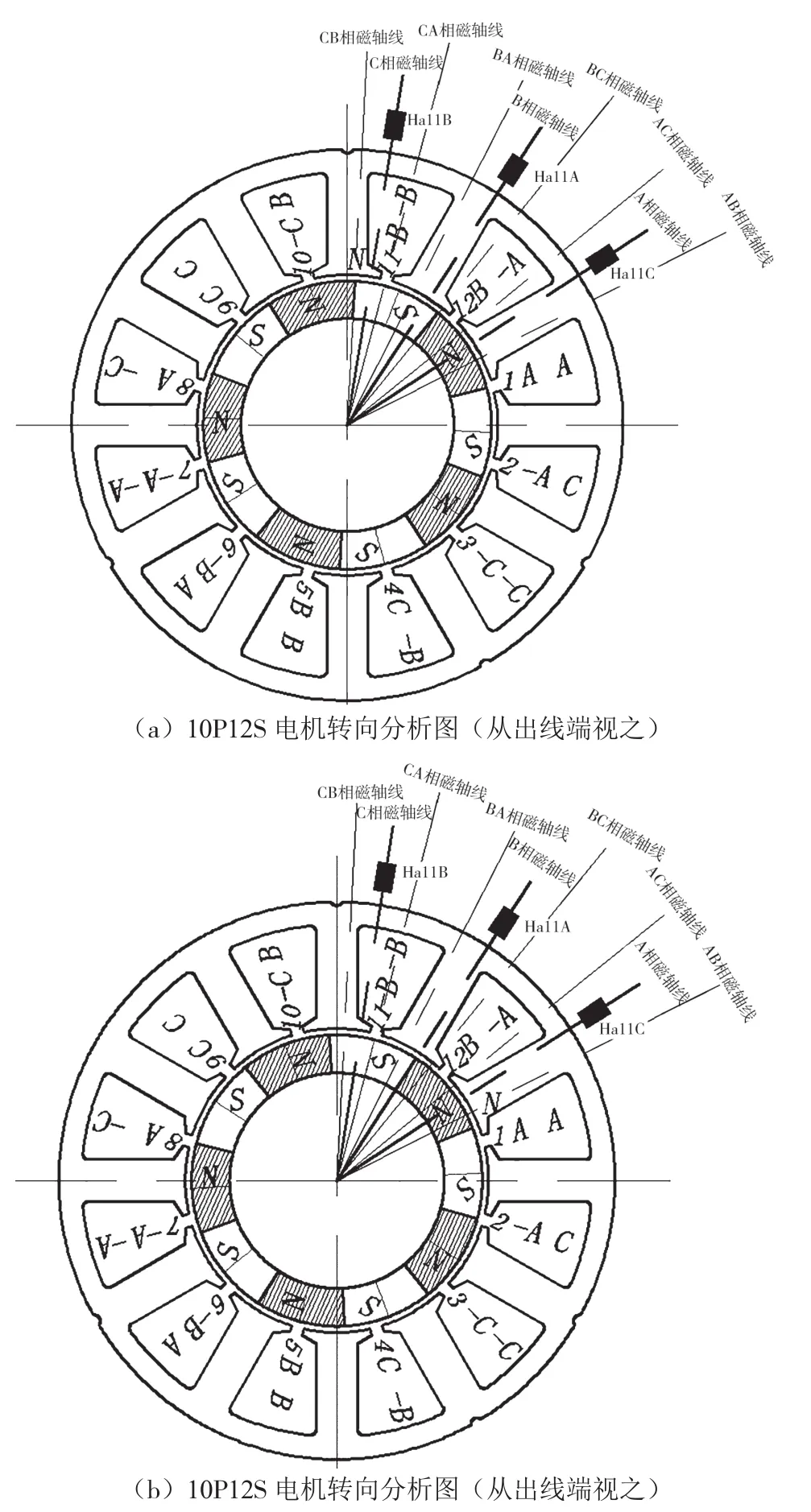
图1 10P12S电机转向分析图(电机引出线指定在非出轴端)
图1(a)中,HallA、HallB、HallC依次布置在B相、C相、A相磁动势轴线对应位置,霍尔集成电路标志面面向圆心。当永磁体的S极面向霍尔集成电路标志面,磁通密度B定义为正,此时霍尔集成电路输出为低电平0。因此当定转子起始随机位置如图1(a)所示时,HallA、HallB、HallC输出的状态信号为001,此时按照表1的设定逻辑,CB两相绕组通电在定转子气隙中产生磁场,转子受到该磁场力的作用,逆时针转动(出线端视之)。当电机转子逆时针转动(出线端视之)时,会引起霍尔输出状态的变化。图1(b)中,当电机转子转动到此位置时,HallA面向S极和N的分界面,只要转子再逆时针(出线端视之)转动一点,HallA的输出信号就由0跳变为1,位置传感器的状态信号也由001转变为101,因此绕组的导通顺序由CB转变为AB,AB两相绕组导通产生的磁场会继续推动转子逆时针转动(出线端视之)。当转子继续转动时,霍尔传感器会依次循环输出6组状态信号001→101→100→110→010→011,控制器也会依次循环接收到此信号,然后按照预先约定好的逻辑依次循环控制对应相绕组CB→AB→AC→BC→BA→CA的导通,因此电机定转子气隙间就会产生逆时针(出线端视之)循环的步进式旋转磁场,电机转子就会逆时针(出线端视之)循环转动。从输出轴端看电机顺时针转动,因而电机实际运行方向与需求方向(见表1)一致。每两相绕组导通时,会推动转子旋转60°电角度。
因此,当电机引出线在非出轴端,需求控制逻辑如表1所示,即电机按照CB→AB→AC→BC→BA→CA依次导通时,电机应顺时针旋转,则电机在设计时,应使得电机三相绕制产生的A→B→C磁动势轴线逆时针(出线端视之)分布,即ABC三相绕组的相对电相位按照逆时针(出线端视之)方向依次增大,互差120°电角度。
2.2 电机引出线指定在出轴端
电机引出线指定在出轴端,此时出线端观察的方向与出轴端观察的方向一致。电机按照AB→AC→BC→BA→CA→CB顺序依次导通时,电机顺时针转动。由此可以推断出,电机三相ABC布线完成后,电机ABC三相形成的磁动势轴线是顺时针旋转分布的,并且电角度相位相差120°。
具体分析为,控制器按照表1的逻辑决定当下时刻绕组的导通,即控制器接收位置传感器的某1组状态信号,按照预先设定的逻辑导通三相绕组对应的两相绕组,电机的实际旋转方向应与需求方向一致。图2为10P12S电机转向分析图(电机引出线指定在出轴端)。
图2(a),HallA、HallB、HallC依次布置在B相、C相、A相磁动势轴线对应位置,霍尔集成电路标志面面向圆心。当永磁体的S极面向霍尔集成电路标志面,磁通密度B定义为正,此时霍尔集成电路输出为低电平0。当电机转子顺时针转动时,会引起霍尔输出状态的变化。图2(b)中,当电机转子转动到此位置时,HallA面向S极和N的分界面,只要转子再顺时针转动一点,HallA的输出信号就由0跳变为1,位置传感器的状态信号也由001转变为101,因此绕组的导通顺序由CB转变为AB,AB两相绕组导通产生的磁场会继续推动转子顺时针转动。当转子继续转动时,霍尔传感器会依次循环输出6组状态信001→101→100→110→010→011,控制器也会依次循环接收到此信号,然后按照预先约定好的逻辑依次循环控制对应相绕组CB→AB→AC→BC→BA→CA的导通,因此电机定转子气隙间就会产生顺时针循环的步进式旋转磁场,电机转子就会顺时针循环转动,因而电机实际运行方向与需求方向(见表1)一致。每两相绕组导通时,会推动转子旋转60°电角度。

图2 10P12S电机转向分析图(电机引出线指定在出轴端)
因此,当电机引出线在出轴端,需求控制逻辑如表1所示,即电机按照CB→AB→AC→BC→BA→CA依次导通时,电机应顺时针旋转,则电机在设计时,应使得电机三相绕制产生的A→B→C磁动势轴线顺时针分布,即ABC三相绕组的相对电相位按照顺时针方向依次增大,互差120°电角度。
3 电机绕组双备份时布线设计与电机转向的关系分析
电机引出线指定在非出轴端,电机绕组为双备份设计,主备绕组不同时工作。电机按照AB→AC→BC→BA→CA→CB顺序依次导通时,电机顺时针转动。表2为10P12S直流无刷电机双备份绕组布线工艺实施表。
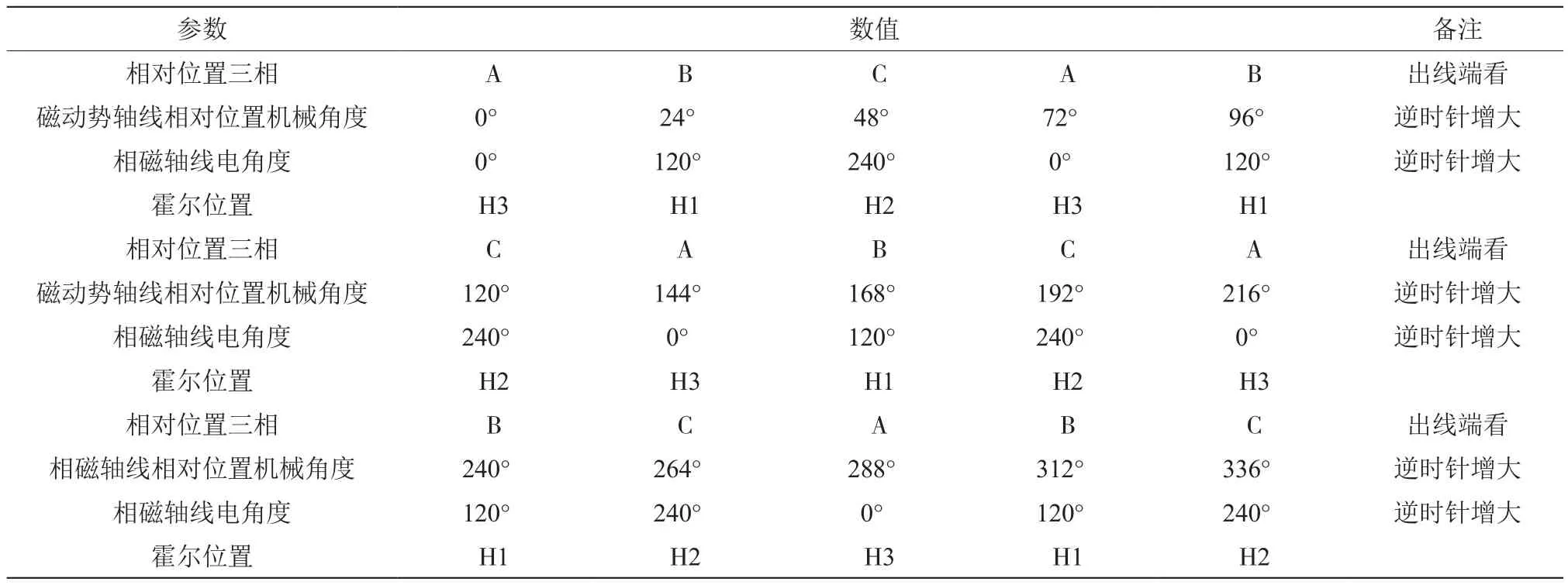
表2 10P12S直流无刷电机双备份绕组布线工艺实施表
电机主备绕组分别形成的ABC三相磁动势轴线逆时针旋转分布的,并且电角度相位相差120°。因为三相绕组在空间上对称分布,主A与备A绕组电相位相差180°(主A起始槽为12,备A起始槽为6),因此备绕组形成的三相磁动势轴线相对主绕组形成的磁动势轴线逆时针滞后180°电角度。因此如果霍尔也要求双备份时,备霍尔安装位置滞后主霍尔安装位置180°电角度。在双备份霍尔安装时,一方面考虑霍尔相对电角度,另外一方面考虑霍尔布局的可操作性。
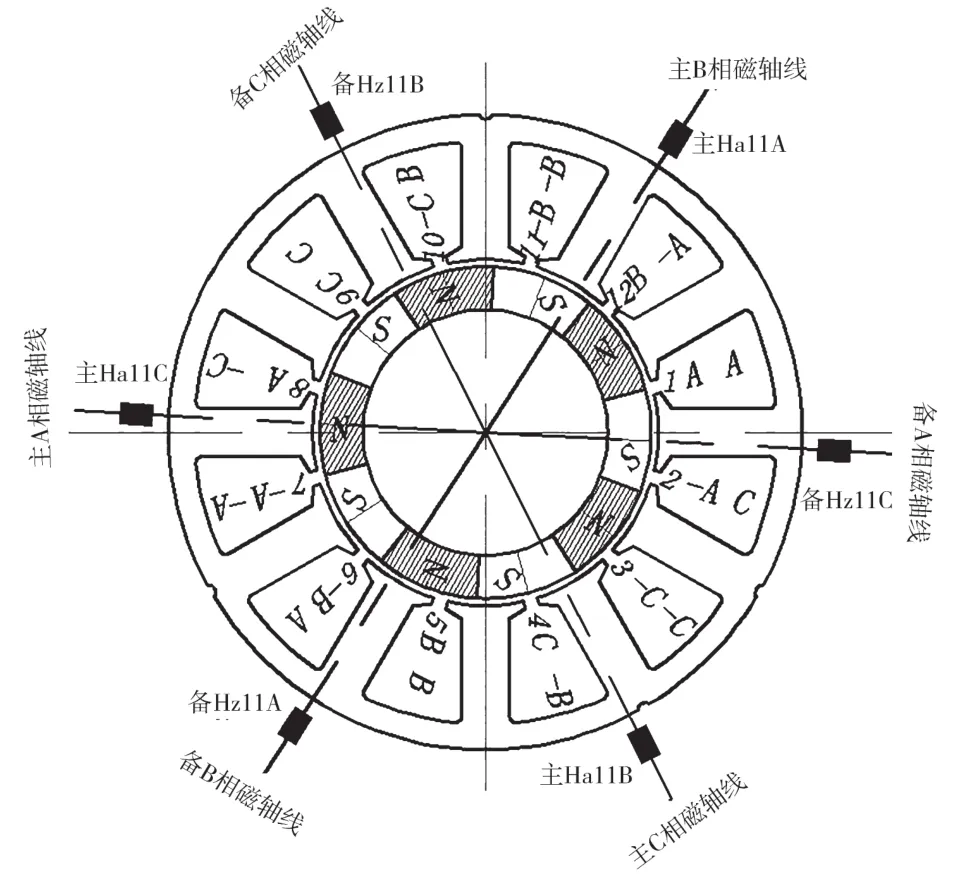
图3 10P12S直流无刷电机双备份绕组霍尔实际布局图(出线端视之)
从图3可以看出,备霍尔相对主霍尔分别差了180°机械角度,180°机械角度对应的电角度为180°电角度,因此与上述霍尔安装分析相一致。此外,ABC三相磁轴线顺时针旋转(出线端视之),但从电角度分析,ABC三相磁动势轴线逆时针旋转(出线端视之),才能保证电机按照AB→AC→BC→BA→CA→CB顺序依次导通时,电机顺时针转动(出轴端视之)。
4 结 论
(1)从相绕组的流向判断出电机转向与三相磁动势轴线电角度旋转方向对应关系(文中例子为ABC依次通正向电流时,从电机出轴端看时,电机顺时针旋转)。
(2)布线工艺实施保证从出轴端看时,三相形成的磁动势轴线旋转方向(从相对电角度判定)与电机转向保持一致。
(3)霍尔位置传感器的布局为三相ABC霍尔与三相BCA磁动势轴线是一一对应,并考虑霍尔布局工艺实施的可操作性。
