面向结肠镜软体机器人设计与建模仿真
2021-01-21邬元富李缘春王依涛
陈 刚,邬元富,李 伟,李缘春,王依涛
(1.嘉兴学院 机电工程学院,浙江 嘉兴 314000;2.广西财经学院 经济与贸易学院,南宁 530007)
当今生活节奏越来越快、人们的饮食结构和生活方式发生了较大的变化,癌症的发病率也不断增加,其中结直肠癌发病率呈现明显上升趋势,在2002—2015年里发病率由7%上升至13%[1],目前位居我国癌症发病率第4位。结肠镜检查是结肠癌检测诸多方法中最为可靠、有效的一种,不仅可以进行细胞切片取得病理诊断,而且可以对病灶进行定位、诊断病灶大小。目前的插入技术迫使外科医生在器械的远端对结肠镜末端部进行控制[2]。然而在进行结肠镜检查中,由于结肠镜末端部无法实现自主控制,在结肠镜推进与取出的过程中,结肠镜末端部容易与肠壁发生不必要的接触,导致结肠粘膜的损伤出血甚至肠壁穿孔[3]。
为了减少患者的不适、降低结肠检查过程中的操作难度,许多研究者选择了自动结肠镜检查的方法。在文献[4]中,作者基于结肠镜检查的2个主要动作,即远端运动和转向,提出了自动结肠镜检查(也称为机器人结肠镜检查)的概念。目前,关于自动结肠镜检查的研究大多集中在利用各种运动机构的自推进机器人上,还有一些研究者们致力于研发无线胶囊结肠镜检查,用于图像诊断或复杂多参数检测[5-11]。其中,蠕动运动的推进方式研究较为广泛。然而,目前大多数基于蠕动的机器人系统,存在以下2个问题:①结肠内部是一个受限的三维空间,关于结肠镜模型的运动规划方面的研究非常少[12];② 结肠内壁表面光滑,在探索结肠时常表现出较低的运动效率。
针对这些问题,本文提出了一种新型可弯曲结肠镜末端结构设计,在相隔120°的方向上各布置一个气动腔室,以实现各个方向的弯曲;再对该软体机器人在输入气压作用下的末端部位置进行分析,利用几何方法建立了其运动学模型,可为软体机器人控制规律的设计与路径规划提供控制模型;最后进行三维仿真模拟结肠镜软体机器人弯曲动作,并搭建实验平台进行验证。
1 结肠镜机器人末端部结构设计
在设计结肠镜机器人末端时,应着重考虑2个方面。第一个方面,此结构应该有足够的刚度来支撑机器人的运动;第二个方面,结构应具有良好的抗弯性能[13]。考虑到这些问题,本文提出了一种三腔驱动末端,它是一个可独立运动的单元,内置3个间隔120°的腔体。顶端横截面外径为16 mm,小于结肠的平均直径。内孔直径为5 mm,用于放置相机等其他照明工具,横截面结构如图1所示。每个气室的内部压力可以使用气动伺服阀独立控制。
2 结肠镜机器人末端部的运动学分析
为了控制机器人末端部的形状,了解机器人顶端的位置与其控制输入之间的关系是必要的。本文在几何学分析与常曲率运动学的基础上建立其运动学模型,常曲率运动学优点在于将运动学转换分解成2个独立的映射:一个从执行器空间到配置空间;另一个从配置空间到任务空间。前者依赖于机器人的实际结构设计,后者则适用于所有符合常曲率假设的设计[14]。当结肠镜机器人受力时,会向某个方向弯曲,可以将其中心线与腔室中心线看作若干段常曲率圆弧[15],用φ表示其弯曲的角度,Φ表示其弯曲方向。其中,A所在阴影表面为软体机器人的上表面,A面与XY平面的夹角为φ,机器人弯曲运动参数如图2、3所示,其参数含义见表1。

表1 参数含义
当负载影响被忽略并且偏转角度φ处于0<φ<π时,处于弯曲状态的的软体机器人的形状可被假定为一个圆弧。鉴于这一假设,显然
结肠镜机器人中心线在底面上的投影与Y轴负方向夹角为Φ,底面与上端面A的相交线为l,则底面腔室圆心到相交线l的距离为Ri,如图2所示。则各腔室中心线相对于弯曲平面的角度为:
利用这些角度,可以将腔室i的曲率半径描述为:
并结合方程(3)(4)可推导出方向角:
同时,中心线的曲率半径和弯曲角φ可表示为:
利用上文确定的运动模型,各腔在压力变化下的对应长度可以表示为:
因此,可将机器人形状参数与输入压力的正运动学方程表示为:
在假定机器人的弯曲形状为圆弧的前提下,通过圆柱坐标变换,可得到机器人在任务空间中末端与机器人弯曲参数相关的笛卡尔坐标(x,y,z)
由此可给出该模型的状态空间:
其中X=(φ,φ,L)T,QP=(P1,P2,P3)T。
3 三维模型与仿真
3.1 模型选择
有限元法广泛地运用于物体的应力、应变分析,模拟物体的物理行为等领域。然而在进行大变形柔性体模拟仿真时,描述应变与位移之间的几何关系发生了变化,因此有限元法在对软体机器人建模仿真中存在着诸多不便。
本次仿真选用专门用于模拟大变形柔性材料的软件包VoxCAD。VoxCAD与传统有限元软件的主要区别在于其使用的是质点-弹簧法模型,基于“欧拉-伯努利梁理论”,将对象分解为由梁单元所连接的立方体单元,如图4所示,每个立方体单元储存有质量和转动惯量;梁单元则储存有平移和转动刚度[16],不仅能够计算拉伸压缩,还将所有轴的横向剪切和旋转考虑进去。
3.2 建立质点-弹簧模型
首先建立一个16×16×110的工作区域,共计28 160个体素。材料模型视作线性材料,具有各向同性,各材料属性由查询相关资料填入,有关参数如表2所示。其中,深色体素直接受力,浅色材料不直接受外力,在相邻体素的弹簧力作用下位置发生相应改变,最终建立一个具有3个腔体的空心圆柱体,如图5所示。
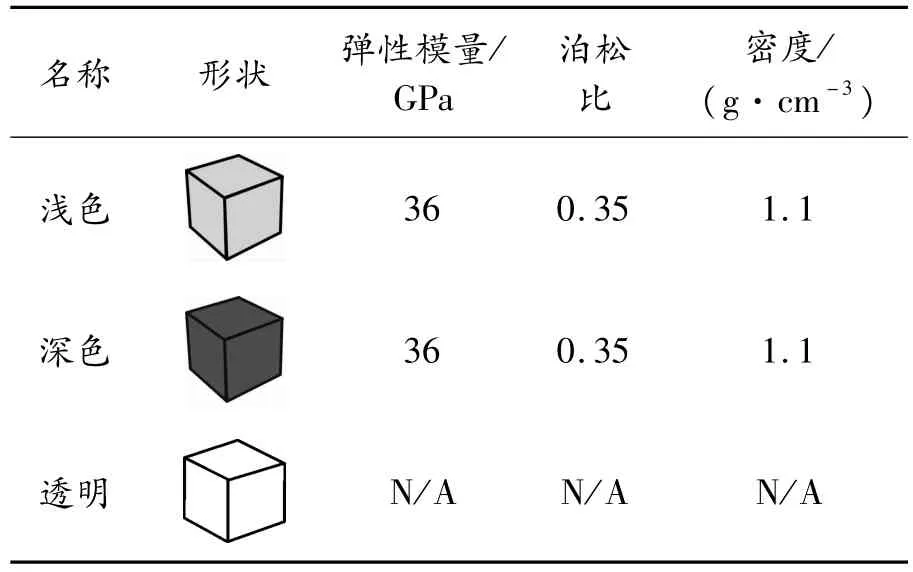
表2 材料参数
3.3 物理仿真
对气动软体机器人弯曲的过程进行仿真,为简化计算,假定软体机器人只有单侧腔体处于充气状态,因而软体机器人会因径向不平衡力发生弯曲。为此,将三维模型底面固定,即底面所有体素自由度为0。腔体内壁体素(所有深色单元)受到垂直于空腔内表面的压力,环境设置中引入重力。模型变形的运动如图5、6所示,在0.7 MPa的压力下,模型最大伸长量为30.7 mm,伸长量与到底面的距离成正相关。充气腔室在压力下向外膨胀,压力大小与到充气腔室的距离成负相关,仿真变形结果如图6、7所示。仿真模型与运动学模型的数据分析将在4.2节中给出。
4 实物验证
4.1 实验平台的搭建
为验证三维仿真与运动学模型的有效性,需搭建实验平台用以测试。本次实验通过控制气动回路内部的气压来实现软体机器人的运动,可分为两大部分:控制回路与气动回路。实验平台系统实物如图8所示。
控制回路:上位机编写程序上传至Arduino板卡,Arduino板卡输出开关信号至继电器,由继电器输出12 V电压控制电磁阀开闭,从而控制软体机器人的3个并联气体腔室的通气与否。Arduino板卡输出PWM信号,经过电压转换模块转变为0~12 V的电压控制电气比例阀,比例阀可输出对应气压来达到控制软体机器人运动的效果。
气动回路:气体从空气压缩机进入气动三联件,先经过调速阀以调节流速大小,再经过电气比例阀调节出口压力,最终得到满足实验所需的气体接入3个3位五通电磁换向阀,每个电磁阀各自与一个腔室相连,由换向阀控制软体机器人空腔的进气与放气。
4.2 实验结果的分析
在压力范围0~0.12 MPa的条件下进行实验,每隔0.03 MPa记录一次气压与末端位置,共5个位置。为了更为直观地对比理论位置与实际位置的差异,可以用5个离散点得到一个连续曲线用以比对,由于实验采集离散点较少,且目标曲线的部分自变量对应2个应变量,因此无法用初等函数将曲线标书出来,故放弃使用函数来拟合或逼近,选用多项式样条插值法。本文通过Matlab三次样条插值得到其样条曲线[17]。
实验样机运动轨迹如图9所示,各模型末端轨迹如图10所示。图中样条曲线穿过5个离散点经样条插值法所得,理论曲线为第2节中的运动学模型在0~0.12 MPa下所得机器人末端坐标的样条曲线,仿真曲线为VoxCAD中模型在压力范围0~0.12 MPa下的末端运动轨迹。
如图10所示,在压力范围0~0.03 MPa下,实验样机曲线、运动学模型曲线基本相同;在气压逐渐增大后,样机位置渐渐偏离理论位置,但趋势大致相同。造成上述误差的主要原因有:软体机器人材料并非均质材料,液态硅橡胶搅拌过程中难以做到绝对均匀,且在凝固过程中不均匀部分与杂质部分会在重力作用下发生沉淀,进一步导致材料的密度不均。因此,软体机器人的运动误差会随着气压的增大而累积。另外,实物模型充气腔室的位置误差也会对其运动结果造成影响。
质点-弹簧模型曲线与运动学模型曲线大致吻合,这进一步验证了理论的正确性。但误差仍然存在,且有着随压力增大而增大的趋势,主要原因在于等曲率模型仅从运动学层面进行研究,在实验样机与三维模型中,会引入重力、弹性变形力等动力学因素,其轴线并不严格符合弧线的假设[18]。
5 结论
本文中设计了一种新型的可弯曲结肠镜机器人,末端的外径为16 mm,小于结肠的平均直径(20 mm),建立了运动学模型,利用弹簧-质点法建立了三维模型并进行可视化仿真,验证了运动学模型的正确性。提出了新的方法对软体机器人进行可视化仿真,展示了软体机器人末端在单腔驱动情况下的运动结果,解决了以往大变形柔性体难以仿真的问题。
软体机器人具有良好的柔性与适应性,十分适用于医学诊断检测、勘探侦查等领域。软体机器人建模与控制方法关乎其形状控制精度,目前分段常曲率法是软体机器人运动学建模领域最常用的方法,但此方法仅从运动学层面进行研究,没有考虑弹性变形力、重力等动力学因素的影响,无法应用到结构形状更加复杂的软体机器人建模,还存在较大改进空间。
