基于PLC的地浸机械式管道清洗装置控制系统的设计*
2021-01-12尹泽远雷泽勇雷洁珩
尹泽远,雷泽勇,雷洁珩,曹 屿
(1.南华大学 机械工程学院,湖南 衡阳 421001; 2.南华大学 电气工程学院,湖南 衡阳 421001)
0 引 言
如今,在铀矿开采行业中原地浸出采铀是最主要的方式[1],其地浸生产井在长年累月的开采中过滤器段容易被堵塞[2],需要及时地清洗地浸生产井保证地浸生产效率,在现如今的清洗方式中有一种地浸机械式管道清洗装置,需要一种卷扬提升系统搭载地浸机械式管道清洗装置对地浸生产井进行清洗。传统的卷扬提升装置主要采用继电器控制,技术相对落后,无法保证卷扬机的安全性和可靠性,且工人需要频繁地操作卷扬机,缺乏自动检测与智能控制功能,自动化程度相对不高,工人的劳动强度大。随着科学技术的发展,工业生产越趋于信息化、数字化,对地浸工业生产要求也越来越高。笔者提出一种基于PLC的地浸机械式管道清洗装置控制系统,采用变频调速的控制方式,可以实现自动排缆、远程控制、远程监测的功能,不仅提高了卷扬机提升装置自动化程度,还提高了整个系统的可靠性、安全性,为铀矿生产带来长远的经济效益。
1 系统控制方案的设计
1.1 系统概述
智能卷扬机系统主要包括驱动电机,减速机,自动排线器,排线丝杠,卷盘滚筒,计数器,控制箱等。控制箱含有变频器、西门子PLC控制器、交流接触器、继电器、触摸屏等控制元件。机械式管道清洗装置含有密封外壳、减速电机、轴承、旋转密封圈、延长轴、法兰、毛刷等部件。智能卷扬机系统如图1所示,机械式管道清洗装置如图2所示。
1.2 控制方案的构想
驱动电机经过减速机减速带动卷盘滚筒盘卷铠装电缆将机械式管道清洗装置进行下放,卷盘滚筒通过链轮带动自动排线器对铠装电缆自动进行有序排线,此时计数器开始计数工作,当下放到设定的清洗深度时,卷盘自动停止,此时启动机械式管道清洗装置,减速清洗电机正转带动毛刷实现正转清洗10 s,然后减速清洗电机反转带动毛刷实现反转清洗10 s,在清洗处进行循环规律正反转清洗,待达到总清洗时间时,机械式管道清洗装置自动停止,卷盘开始回收机械式管道清洗装置,完成一次清洗。清晰效果对比见图3所示。

图1 智能卷盘系统1.卷筒 2.控制柜 3.减速器 4.自动排线器 5.驱动电机

图2 机械式管道清洗装置1.法兰 2.密封外壳 3.减速电机 4.轴承 5.旋转密封圈 6.延长轴 7.毛刷

图3 机械式管道清洗装置清洗前后对比
2 硬件系统的设计
2.1 PLC选型
PLC作为一种具有微处理器的用于自动化控制的数字运算控制器,广泛地应用于工业控制现场[3]。尽管现在市面上生产PLC的厂家很多,生产型号也不同,但是其工作原理和使用方式却相差无几。本文采用西门子S7-1200系列的PLC,其具有可靠性高、输入/输出功能模齐全块、安装方便的特点,符合我们的设计使用要求。通过分析整个系统的运作情况,其输入点主要由卷盘的回收和下放启动开关、停止开关、计数器的输出信号、机械式清洗管道的启动停止开关等组成,输出点由卷盘的驱动电机以及机械式管道清洗装置的减速电机等组成。地浸机械式管道清洗装置控制系统系统框图如图4所示。

图4 地浸机械式管道清洗装置控制系统系统框图
2.2 控制电路
控制柜的控制电路分主电路以及控制电路。主电路主要采用的是380 V的工业交流电,用以驱动卷盘电机。控制电路是在主电路的基础上接两路形成220 V的交流电,在220 V交流电路上连接一个直流转换电源将220 V的交流电转换成24 V的直流电,此DC24V的直流电持续不断地给西门子PLC、HMI触摸面板以及机械式清洗装置的清洗电机供电。其具体的控制柜主电路原理图如图5所示。
2.3 PLC的外围接线
考虑到控制系统的控制情况,需要将输入和输出点和PLC的外部接线相连接,具体的外围接线图如图6所示。
3 软件系统的设计
此系统的软件和程序设计采用西门子公司开发的TIA V14(博图)软件。该软件采用统一工程组态和软件项目环境,基本上可以用于所有的自动化控制任务。能够对西门子旗下的PLC产品进行配置、 编程组态以及调试。 借助这款软件可以使本方案的软件设计更加方便[4]。
3.1 程序流程图
根据控制要求,通过TIA软件可以对地浸机械式管道清洗装置控制系统进行设计,该控制系统的软件设计流程如图7所示。
3.2 输入输出地址
该系统的输入点和地址:I0.0-卷盘下放软管启动按钮SB1,I0.1-卷盘回收软管启动按钮SB2,I0.2-卷盘停止按钮SB3,I0.3-机械式管道清洗启动按钮SB4,I0.4-机械式管道清洗停止按钮SB5,AW64-变频器模拟信号输入, AW66-计数器模拟信号输入。Q0.0、Q0.1-卷盘电机正反转控制输出,Q0.2、Q0.3-机械式管道清洗电机正反转输出,QW64-变频器模拟信号输出,QW66-计数器模拟信号输出。如表1所示:I/O地址分配表如表1所示。卷盘电机控制输出。

图5 控制柜主电路原理图

图6 PLC的外部接线图

表1 I/O地址分配表
3.3 程序设计
西门子PLC编程语言主要有梯形图语言(LD)、结构化语言(ST)、顺序功能图(SFC)、高级语言等[5]。本方案主要采用TIA V14软件进行梯形图语言设计程序,其机械式管道清洗装置程序设计如图8所示,其卷盘控制程序设计如图9所示。
当开始进行清洗工作时,按下SB1按钮,卷盘的驱动电机开始进行正转,带动着铠装电缆将机械式清洗装置沿着井口进行下放,此时计数器开始工作。采用4~20 mA电流信号输出的变频器,可以调节卷盘的驱动电机运转快慢,其速度调节范围是5~7 r/min。当机械式管道清洗装置达到清洗位置时(程序里面设计为300 m),卷盘电机自动停止下来,按下SB4按钮,启动机械式管道清洗装置,机械式管道清洗装置开始清洗,清洗电机正转清洗10 s,然后反转清洗10 s,如此循环一直达到总清洗时间(程序里面设计为600 s)。清洗完毕之后,启动SB2,卷盘驱动电机开始进行反转回收机械式管道清洗装置,完成一次完整的清洗。
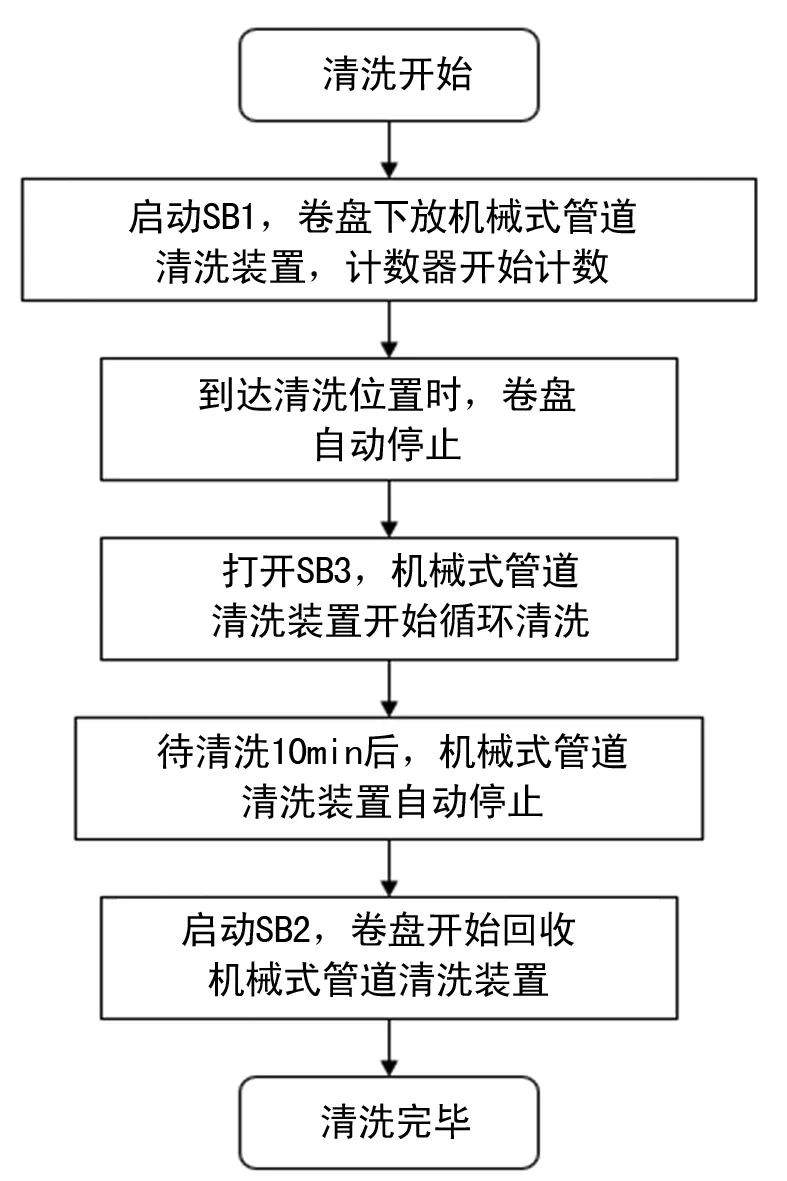
图7 程序设计流程图

图8 机械式管道清洗装置程序设计图
3.4 组态控制面板设计
地浸机械式管道清洗装置控制系统的上位机监控面板采用西门K TP700 Basic PN型号,并利用TIA V14的WinCC软件完成上位机监控界面的设计[6],时刻地监测整套系统的运行状态,如图10所示。
控制系统的运行状态显示主要包括卷盘电机频率,卷盘下放深度以及机械式管道清洗装置清洗时间等信息的显示,同时也包括开关量的输入输出信号当前状态以及控制参数当前数值的显示;控制操作部分主要实现对卷盘系统以及清洗系统的控制,通过按钮可以实现机械式管道清洗装置的下放及回收,机械式管道清洗装置的清洗等一系列的操作;控制参数则可以设置控制系统运行时相关参数的取值,如频率设定可以调节卷盘驱动电机的运转速度。操作人员可以通过触摸屏面板控制该系统的运行,可以通过修改频率设定相关参数调节卷盘电机运行速度,还能够查看系统各部分的运行状态。

图9 卷盘控制程序设计图

图10 控制面板组态图
4 结 语
设计了一套适用于地浸机械式管道清洗装置的自动控制系统,对地浸行业生产的过滤器堵塞处进行清洗,清洗之后能够有效地提高了过滤器段滤液渗透率,解决了过滤器段堵塞造成的滤液渗透率不高的问题,提高了地浸生产行业生产效率。该系统具有技术成熟、价格低廉,功能齐全等特点,并且操作界面对人友好,简单易懂,降低了工人的劳动强度。该设计适合我国地浸生产行业应用现状,具有较高的推广作用。