纸币熨叠机落钞顺钞机构设计与仿真*
2021-01-12王会中朱留宪伍晓亮李海鹏
王会中,朱留宪,伍晓亮,李海鹏
(1.四川省高温合金切削工艺技术工程实验室,四川 德阳 618000;2.西南交通大学 机械工程学院,四川 成都 610031;3.四川工程职业技术学院 机电工程系,四川 德阳 618000)
0 引 言
随着经济的发展和科技的进步,纸币在国际和国内市场的快速、大量流通,对纸币钞票的整理工作提出了更多、更高要求。对于流通中产生的大量零钞纸币,传统整钞工序往往采用人工分拣、清点以及捆扎等方式,但传统整钞方式存在着工作量大、易出错、效率低以及卫生状况差等状况,远远不能满足工作要求以及科技发展的需要。现阶段虽然发展了微信、支付宝等线上、线下的快捷支付方式,很大程度上降低了零钞纸币的使用,但由于我国人口基数大,线上线下支付对于年老者、青少年或一些客观原因仍存在一些困难,大量钞票整理仍是银行、公交公司、超市等企业面临的难题。在纸币零钞整理方面,相关企业、科技公司以及学者进行了大量研究工作。东北大学范先虎利用MATLAB软件分析了粘连纸币进钞阶段摩擦系数、压力对进钞的影响,同时运用RecurDyn对多种进钞工况进行了仿真分析[1]。鲍照运用RecurDyn建立了送纸机构力学模型,理论分析了机构材料、尺寸对卡纸的影响,并通过扭矩实验进行了验证[2]。龚新玉设计了一种纸币零钞整钞输送机构,用于零整钞自助兑换服务终端[3]。徐天禄等提出了一种可快速整理钞票的装置及方法[4]。
Markus Sperl提出了一种对齐无序片式产品的装置[5]。梁金生设计了一种双凸轮五杆取纸机构,通过运动仿真实现了高速、无纸间摩擦取纸[6]。
综上所述,对于大量散乱零钞的整理研究,大多集中于送钞机构的设计、仿真及优化工作,仍存在着传动机构复杂、零钞对齐整理机理不明确、难以推广应用等难题。为此,通过对落钞顺钞机理进行研究,设计了一种纸币熨叠机落钞顺钞机构,并进行仿真和试验验证,达到了落钞顺钞机构依靠纸币自身惯性作为动力实现大量零钞整理时的顺钞、叠钞功能。
1 纸币熨叠机
1.1 工作原理
纸币熨叠机主要由零钞(纸币)网带负压输送装置、零钞阵列吸附装置、零钞展熨装置、零钞张压定型装置、落钞顺钞装置以及叠钞装置组成,如图1所示。纸币熨叠机工作时输送网带置于负压箱并循环移动,若干待整理零钞置于零钞料箱网带上被吸附输送;将输送网带局部解除负压,使用正压风力将输送网带上局部解除负压吸附的零钞与未解除负压吸附的零钞分离而实现零钞在网带上阵列输送;利用正压风力将对折零钞翻展铺开而被负压整体吸附于网带;利用蒸汽对折角零钞从上位和下位分别蒸熨使折角展开;利用软质颗粒或糙面带滚压已经翻展、蒸熨后吸附在网带上的零钞,使零钞表面产生张力而定型;张压定型后的零钞在落钞顺钞机构作用下而顺着长度方向进入接钞轮;高速旋转的接钞轮使顺向钞票整齐堆叠。

图1 纸币熨叠机
1.2 落钞顺钞机构
落钞顺钞机构是纸币熨叠机纸币零钞整理的重要机构,其功能是将输送带上零钞方向随机分布的纸币调整为长度方向与重力方向一致。落钞顺钞装置包括导引装置和顺钞装置。为使输离网孔输送带上的零钞顺利进入斜面空间,在网孔输送带末端(右)设置导引带,改变出钞速度方向、跌落进入斜面空间,如图2所示。

图2 落钞顺钞机构
进一步在位姿调整单元作用下,纸币位姿调整为沿长度方向滑落进入接钞轮。设计时考虑的主要问题是落钞斜面倾角、位姿调整单元的位姿调整柱设置和倾斜导条斜度,由于采用无动力落钞,设计时采用较大的斜面倾角(75°)和倾斜导条斜度(68°),依靠零钞重力进行落钞;落钞顺钞装置设计的技术关键是位姿调整柱位置和相互关系的设置,第一位姿调整柱和第二位姿调整柱须分置于钞票滑落中心两侧,并满足以下几何关系:
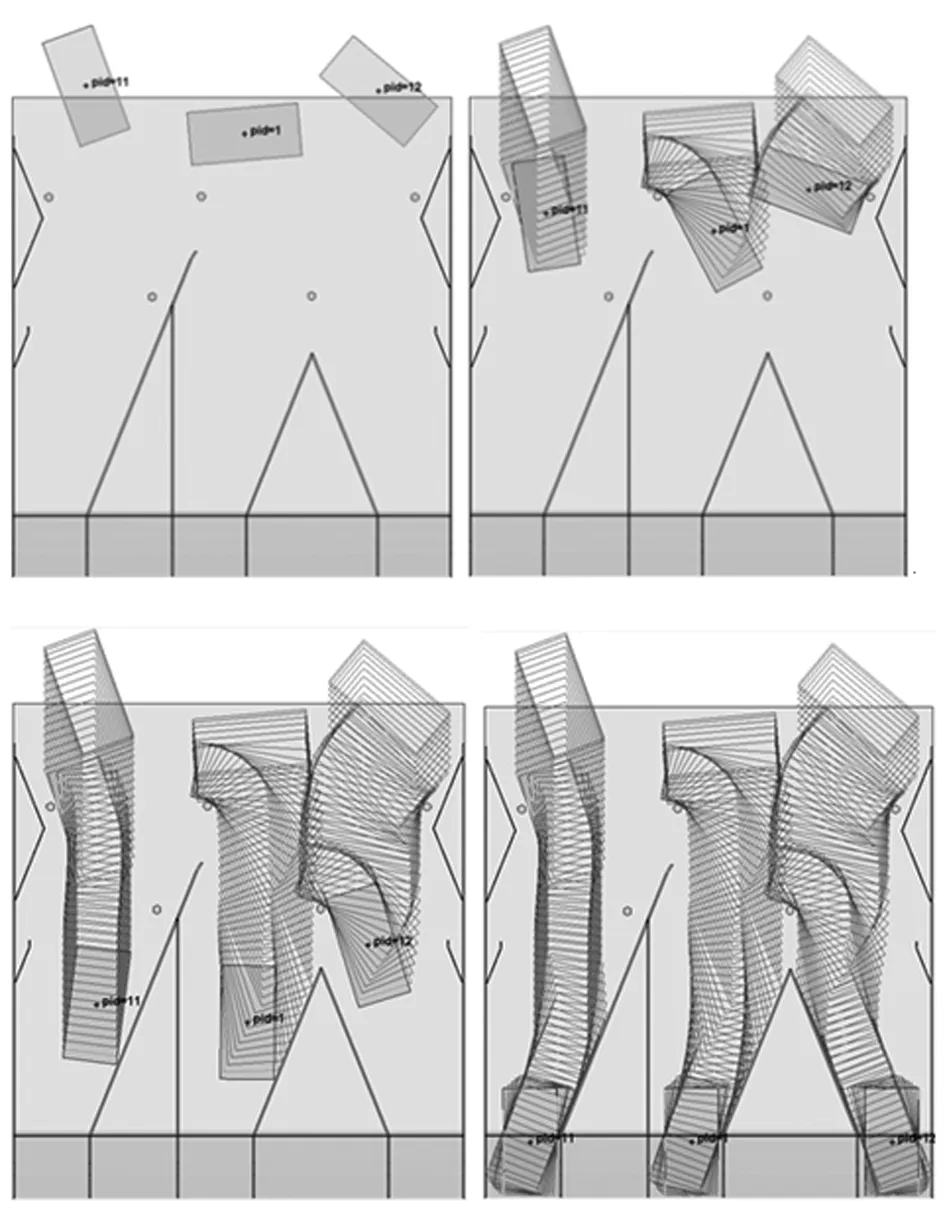
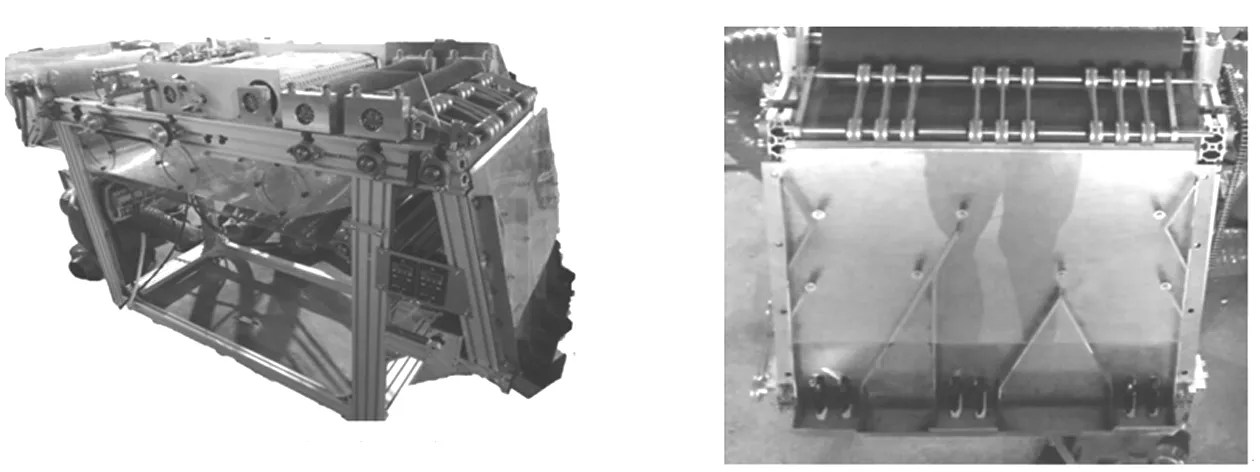
b (1) a>Lb (2) 式中:b为零钞宽度;h为调整立柱沿落钞斜面宽度方向的距离;L为钞票的长度;a为第一位姿调整柱和第二位姿调整柱中心距,Lb为钞票对角线长度。 落钞顺钞机构工作原理是:当零钞纸币长度方向与重力方向呈α为锐角时,纸币与位姿调整柱碰撞后纸币在惯性作用下绕位姿调整柱转动滑下,α变为更小的锐角。当零钞纸币与重力方向呈β为90°左右时,碰撞一次后变为锐角,当零钞纸币与重力方向呈γ为钝角时,与第一位姿调整柱碰撞一次后变为90°左右,与第二位姿调整柱二次碰撞后变为锐角,进一步,长度方向与重力方向呈锐角的纸币在倾斜导条的作用下,将纸币方向调整为长度方向与重力方向一致。 为了验证落钞顺钞机构设计的合理性,采用有限元方法,基于LS-DYNA对落钞顺钞进行动力学仿真。在SolidWorks中建立落钞顺钞机构三维模型,为了与实际物理样机相一致,零钞散乱随机分布。将建立的三维模型导入Hypermesh中进行网格划分,建立有限元动力学模型。为了保证计算精度的准确性,对落钞顺钞机构、纸币零钞进行了六面体网格划分,定义网格单元尺寸大小为6 mm,单元总数为13 659,节点总数为27 910。因落钞顺钞机构在动力学仿真中变形较小,仿真环境中采用刚体材料(MAT_RIGID),零钞纸币采用双线性弹塑性材料(MAT_PLASTIC_KINEMATIC),建立的落钞顺钞机构有限元模型如图3所示。 图3 有限元模型 按照落钞顺钞机构设计要求,纸币零钞初始状态为重力方向分别呈α(锐角)、β(90°左右)以及γ(钝角)分布。落钞顺钞机构底部施加SPC固定约束,约束X、Y、Z三个方向的平动和旋转自由度;对散乱零钞施加重力加速度9.8 m/s2,实现无动力落钞,零钞初速度设置为0.1 m/s;为保证壳单元法向与接触方向的一致性,施加零钞与落钞顺钞机构接触方式为自动面面接触(ATUOMATIC_SURFACE_TO_SURFACE);赋予零钞壳单元算法,剪切因子设置为1,积分点数量设置为3,赋予落钞顺钞机构实体单元算法,单元类型采用常应力实体单元;时间步长因子为0.9,求解时间为2 s。 计算求解完成后,将结果文件d3plot导入LS-PREPOST软件进行后处理操作。由计算结果可看出,图为三张零钞纸币初始时刻位姿,由于重力作用,零钞纸币进行自由落体运动,然后分别与调整柱产生冲击碰撞,改变了三张零钞纸币的位姿与运动方向,如图所示。随着跌落过程的进行,左侧与中间纸币与倾斜导条碰撞后沿着倾斜导条滑落至导向槽内;右侧纸币与 调整柱发生二次碰撞后,由于重力作用产生倾斜力矩,右侧纸币位姿和方向发生改变,接着与倾斜导条发生碰撞,最后沿着倾斜导条滑落至导向槽内,如图所示,实现了落钞、顺钞等功能。 图4所示为落钞过程中三张零钞纸币(从左至右分别为纸币1、纸币2、纸币3)质心位移随时间变化的曲线,由图5可看出,零钞纸币初始位移为0 m,由于受到重力作用,纸币加速下落,与调整柱、倾斜导条碰撞,位移直线增加,落入导向槽后,位移曲线变为平缓,位移不再增加。 图4 纸币运动轨迹 图6所示为零钞纸币下落过程中质心速度的变化,初始速度为0.1 m/s,三张零钞纸币分别与调整柱碰撞,速度急剧减小,碰撞后由于重力作用,速度继续增加,纸币3与调整立柱发生两次碰撞,有速度曲线图中可看出,速度有两次发生急剧减小和急剧增加,三张纸币最后与导向斜条发生碰撞后,分别沿着导向斜条滑落至导向槽,纸币方向调整为长度方向与重力方向一致。 图5 纸币质心位移 图6 纸币质心加速度 依据纸币熨叠机工作原理以及顺钞落钞机构仿真结果分析,制造了一台纸币熨叠机物理样机,样机和落钞顺钞机构如图7、8所示。由试验可看出,散乱零钞经辊压、整形,由传送带输送至落钞顺钞机构,进行重力自由落钞,零钞与调整立柱、导向斜条碰撞后滑落至导向槽,纸币方向调整为长度方向与重力方向一致。经试验验证,落钞顺钞机构效果好,如图9所示,实现了落钞顺钞功能,满足了设计要求。 图7 纸币熨叠机样机 图8 落钞顺钞机构样机 图9 纸币跌落试验 设计了零钞纸币熨叠机落钞顺钞机构,基于LS-DYNA软件对落钞顺钞进行了动力学仿真,并制作了物理样机进行了纸币零钞落钞顺钞试验。结果表明,落钞顺钞动力学仿真与试验结果一致,设计的落钞顺钞机构实现了落钞顺钞功能,满足了设计要求。解决了大量散乱零钞整理时的顺钞、叠钞问题。促进了纸币熨叠机的推广应用,同时为相关功能的机构设计提供了思路和方法。2 落钞顺钞动力学仿真
2.1 有限元模型

2.2 边界条件
2.3 结果分析


3 落钞顺钞试验

4 结 语