基于IRobotSIM工业机器人上下料工作站仿真设计*
2021-01-12冯玉飞邓三鹏祁宇明
冯玉飞,邓三鹏,祁宇明
(天津职业技术师范大学机器人及智能装备研究院,天津 300222)
0 引 言
随着德国工业4.0、美国工业互联网及中国制造2025的提出,智能制造、自动化装备等产业得到重点关注,我国制造业目前正在推进以提高产品质量和企业生产效率为目标的“机器换人”[1-3],工业机器人极大地提高了五轴机床上下料效率,降低了人员安全事故的发生率,快速满足工厂的大批量生产,提高了企业的市场竞争力[4]。
生产线节拍是影响着企业生产效率重要因素,在生产线投入进行前,通常需要耗费大量的人力和物力资源进行生产线节拍设计和调试,而且一旦订单需求发生改变,又可能需要重新进行生产线节拍设计和调试,文献检索发现生产线的节拍分析多以工业机器人调试为主,仿真优化工具主要是RobotStudio和ROBO GUIDE,很少考虑到传送带、数控机床与工业机器人之间的协同设计[5-7]。
为提高工业机器人上下料工作站的设计效率,笔者通过对新设计的工作站进行全周期生产过程动态模拟和多视角观察,得出单一工序的生产节拍,通过调节工业机器人和传送带的位置和运行速度,达到优化工作站空间布局和生产节拍的目的,解决了生产线现场调试周期长的问题[8-11]。
1 上下料工作站整体布局
工业机器人上下料工作站如图1所示,主要包括工业机器人、末端执行器、五轴机床、毛坯件传送带、成品传送带和托盘等。工业机器人通过末端执行器夹持毛坯件和成品件;毛坯件传送带用于输送毛坯件,成品传送带用于把托盘输送至工业机器人放置成品件的位置,当托盘满载后自动将满载的托盘输送至成品传送带末端,同时输送下一个托盘。
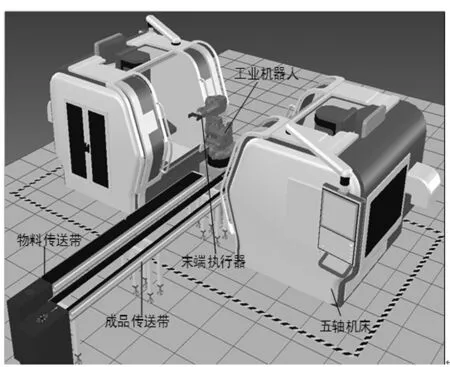
图1 工业机器人上下料工作站布局
2 搭建上下料工作站场景
在SolidWorks环境中设计工业机器人、五轴机床、传送带等组件的三维几何模型,并将设计好的三维几何模型以.stp格式导入IRobotSIM仿真环境中,通过拖拽三维几何模型搭建工作站空间布局,建立工业机器人和五轴机床运动模型。
2.1 工业机器人运动模型建立
在IRobotSIM仿真环境中,将工业机器人合并为底座、末端执行器和运动轴(一轴、二轴、三轴、四轴、五轴、六轴)三大部分,在各运动轴旋转中心位置安装旋转关节,并设置旋转关节的运动最小行程、行程范围和当前位置,按照从底座到六轴的顺序拖动旋转关节和运动实体,采用树形结构建立各轴运动单元与旋转关节的运动关系,如图2所示;建立执行器末端点和目标点,采用DLS阻尼最小二乘法实现执行器末端点与目标点逼近运算。
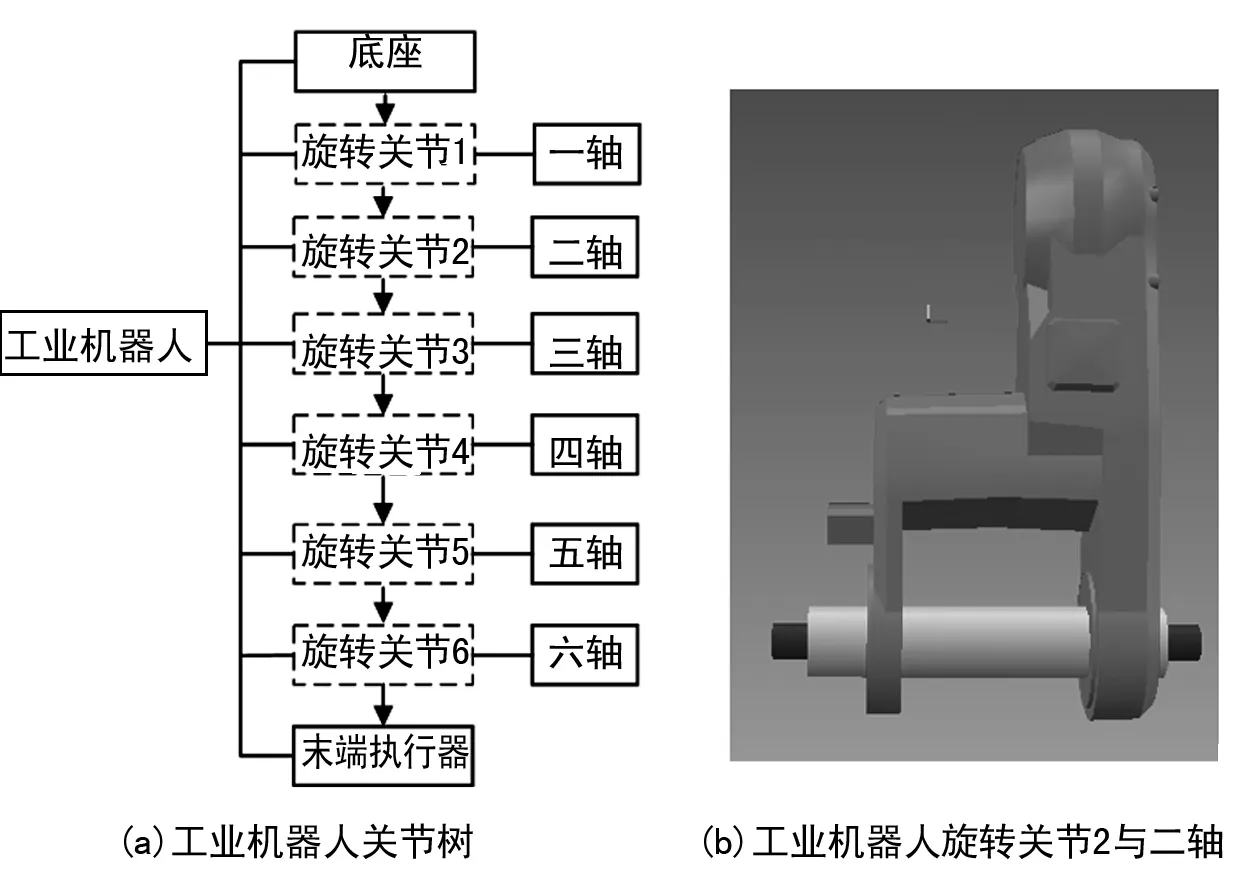
图2 工业机器人运动模型
2.2 五轴机床运动模型建立
将五轴机床合并为底座、防护门、机床夹具、机床X轴、机床Y轴和机床主轴,其中防护门、夹具、机床X轴、Y轴均属于直线运动,机床主轴为连续旋转运动;可以在防护门、机床夹具、机床X轴、Y轴的运动单元安装平移关节,并设置平移关节的运动最小行程、行程范围和当前位置模拟各单元直线运动,在机床主轴添加旋转关节,并将旋转关节设置为无限行程模拟主轴连续旋转运动,五轴机床关节树如图3所示。
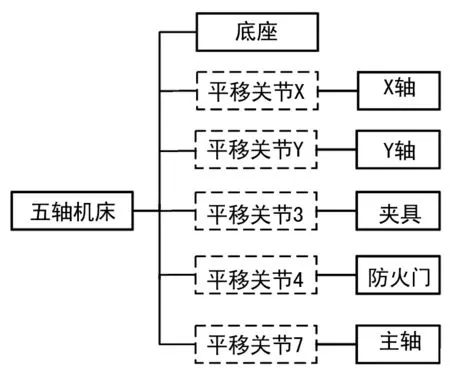
图3 五轴机床关节树
3 设定上下料工作站生产节拍
工业机器人上下料工作站仿真运行需要4个线性脚本同时驱动,通过线程脚本驱动各个运动单元按照设定的程序运动,实现从毛坯件到成品件的出料、上料、下料和收纳动作仿真。线性脚本1的功能是将毛坯件输送至工业机器人的抓取位置,同时触发工业机器人抓取毛坯件;线性脚本2的功能是通过与工业机器人双向通信确定毛坯件的位置,启动五轴机床加工毛坯件程序,线程脚本1、2如表1所列。
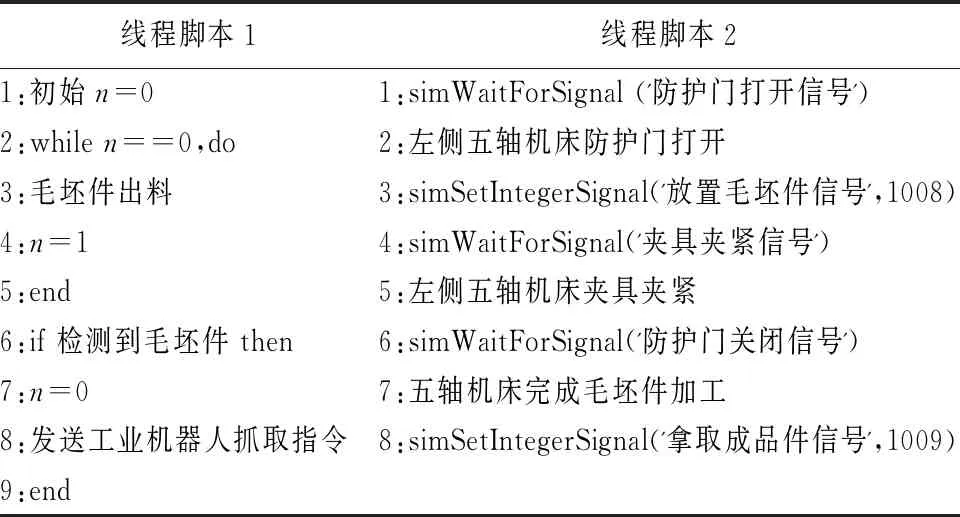
表1 线程脚本1、2
线性脚本3的功能是工业机器人夹持毛坯件放置在五轴机床加工台,将加工完的成品件放置在托盘中,完成2两台五轴机床轮流上料和下料;线性脚本4的功能是当托盘满载后,成品输送带自动将托盘输送至末端,同时输送新的托盘,线性脚本3、4如表2所列。

表2 线性脚本3、4
4 上下料工作站仿真运行
在IRobotSIM的虚拟环境中真实地模拟工作站的生产加工动态过程,通过多视角观察和碰撞检测,验证工作站空间布局的合理性,如图4所示,并记录单一加工节拍生产时间,如表3所示。
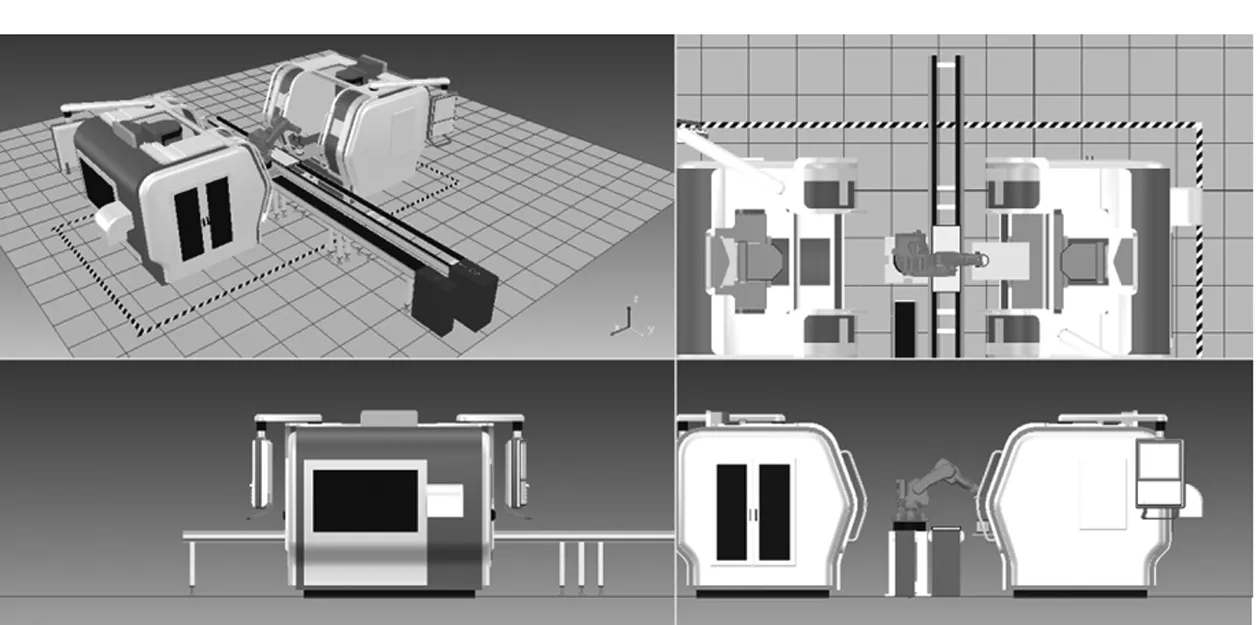
图4 工业机器人上下料工作站多视角过程
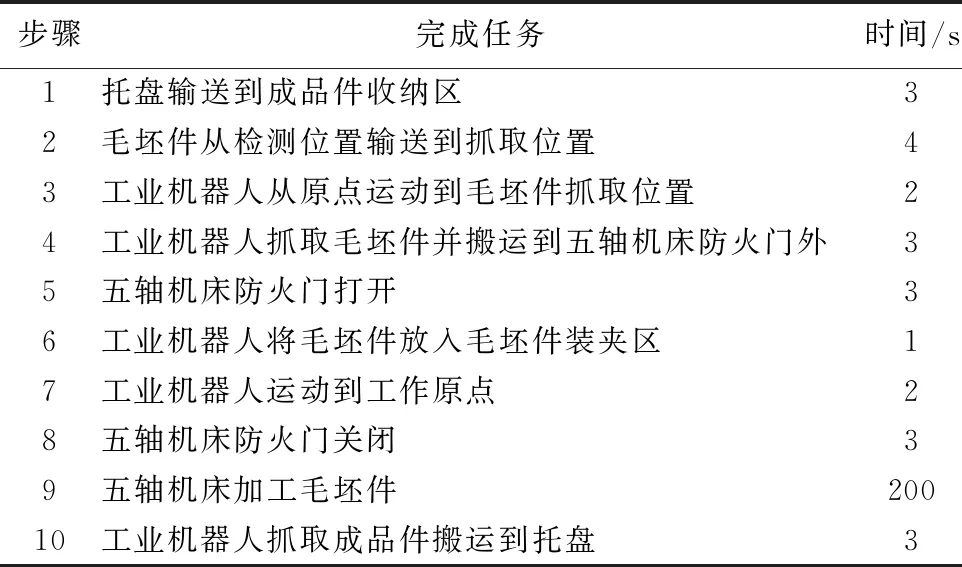
表3 单一加工工位生产节拍
通过调整设备的位置坐标,对工作站的空间布局进行优化;毛坯件从检测位置输送到抓取位置时间为4 s,工业机器人运动到抓取位置为2 s,在抓取毛坯件过程中,工业机器人等待时间为2 s,通过调节传送带输送速度和移动距离传感器的检测位置,将毛坯件从检测位置输送到抓取位置时间调整为2.1 s,工业机器人等待时间调整为0.1 s,降低了工业机器人上下料的等待时间。若要继续提高上下料效率,可通过增加托盘输送速度、毛坯件输送速度,或提高工业机器人的运动速度来实现。
5 结 语
分别对工业机器人上下料工作站的组成、工作站场景的搭建、工作站生产节拍的设定以及工作站仿真分析四个方面进行了论述,在IRobotSIM仿真环境中,通过对工作站进行全周期生产过程动态模拟和多视角观察,验证工作站的可行性、可靠性,找到工作站前期研发设计可能存在的缺陷。通过调整工业机器人、传送带等设备的位置坐标,优化工作站的空间布局;通过调整工业机器人运行速度、传送带输送速度以及毛坯件投放周期等生产参数,优化工作站的生产节拍,加快了生产线调试和迭代更新速度,为生产线建设或者工艺改进提供了新的智能解决方案。