微小型旋翼无人机噪声适航测试研究*
2021-01-12郭少杰
夏 天,郭少杰
(1.天津电子信息职业技术学院,天津 300350; 2.中国汽车技术研究中心有限公司,天津 300300)
0 引 言
近年来,多旋翼无人机由于其轻巧、机动、灵活等特性,在各个领域有着广泛的应用。而在一些应用场景中,例如:利用多旋翼无人机进行声音采集、利用多旋翼无人机进行社区快递的运送等对于多旋翼无人机的声学特性要求非常高,有些特殊场景旋翼无人机自身的噪声甚至决定了执行任务的成败。主流的无人机制造厂商已经开始对无人机噪声进行优化[1-3]。而对于微小型旋翼无人机的噪声测试,国内相对较少。2018年,王兵[4]在其论文《小型无人机的仿生降噪》中提到两种测试无人机旋翼噪声的方法,一种是在静音室内进行的静态噪声测试,另一种是在空旷的室外环境中进行的飞行噪声测试,在国内初步提出了无人机噪声测试的两种简易方法。而在国外,2010年,意大利的Marino[5]首次建立了应用于小型无人机旋翼的气动声学测量模型,主要针对小型旋翼无人机的旋翼声压级分析。2013年,英国的Sinibaldi等[6]提出了小型无人机的静态旋翼噪声分析实验,这种基于静态无人机旋翼噪声分析试验的方法,在后续的旋翼无人机旋翼噪声测试中被广泛应用与不断改进。而在无人机噪声适航测试方面,JARUS(Joint Authorities for Rulemaking on Unmanned Systems,无人机规章联合制定机构)中的一些国家提出了对旋翼无人机进行噪声适航审定测试的概念,但是具体的审定方法尚未明确。特别是对于微小型(Small & Nano):重量小于5 kg,飞行半径小于10 000 m,飞行时间小于1 h,飞行高度低于250 m的旋翼无人机尚未具有明确的噪声适航审定方法[7]。
有鉴于此,笔者基于对某型微小型旋翼无人机进行噪声适航的数据采集方法探究,采集多组实验数据进行分析,以期待获取相对准确的测试方法。
1 试验依据
重点参考了《航空器型号和适航合格审定噪声规定》以下简称《CCAR-36-R2》[8]和《CFR Part 36_Noise standards: Aircraft type and airworthiness certification》,以下简称《FAR-36》[9]。
在《CCAR-36-R2》的附件G中规定了螺旋桨小飞机和螺旋桨通勤类飞机的起飞噪声要求。该附件主要针对螺旋桨驱动的飞机,包含无人驾驶飞机,飞越阶段至少进行六次的数据记录,且要符合环境要求。考虑到微小型多旋翼无人机起飞重量极小,并且垂直起降的特性,与飞机起飞、飞越以及降落特性有着本质不同,故着重参考了该文件附件J中最大审定起飞重量不大于3 175 kg的直升机噪声合格审定作为替代程序。在《FAR-36》中,重点参考该文件的附件J,该附件中也对于起飞重量不大于3 175 kg的旋翼直升机噪声测试给出了指导性意见。
需要注意的是,微小型旋翼无人机在起飞重量和动力配置上,和直升机有着极大的差异。微小型旋翼无人机起飞重量往往在5 kg以内,并且动力装置往往是无刷直流电机驱动旋翼,电机本体噪声和发动机本体噪声所带来的噪声等级水平也具有显著差异[10-11]。因此,考虑到质量、驱动方式、动力装置构型[12]以及功率等因素的巨大差异,上述针对直升机的噪声适航测试方法,可能在某些情况下,并不适用于本文所研究的微小型旋翼无人机,需要在试验过程中逐步调节测定参数,开创性探索适合于微小型旋翼无人机的飞行噪声测试方法。
2 无人机噪声测试试验
2.1 环境要求
传声器(麦克风)周边不能有过多吸收、反射声波的物质,例如高大树木、建筑等;在旋翼无人机进行试飞时,周边不能有干扰航线的物体,若出现影响无人机偏离航线的事、物,该次测试数据作废。气温在2~35 ℃之间,相对湿度在20%~95%之间,以保证1/3倍频程中的8 kHz频段的大气衰减率在每100 m衰减10 dB以内。风速小于5.28 m/s,风速的测量要在距离地面1.2~10 m之间。背景噪声必须低于无人机测试时所测得的A计权最大声压级15 dB(A)以上,因此,需要适当调整无人机飞行时的高度H,以使得测得的噪声数据值有效[13]。
2.2 器材选用
选用MicW-i437L传声器,该传声器符合IEC61672二级声级计标准,NoiseLab声学分析软件,如图1所示。无人机选用微小型旋翼无人机(大疆“御Mavic 2 Pro”),起飞重量0.907 kg,如图2所示。
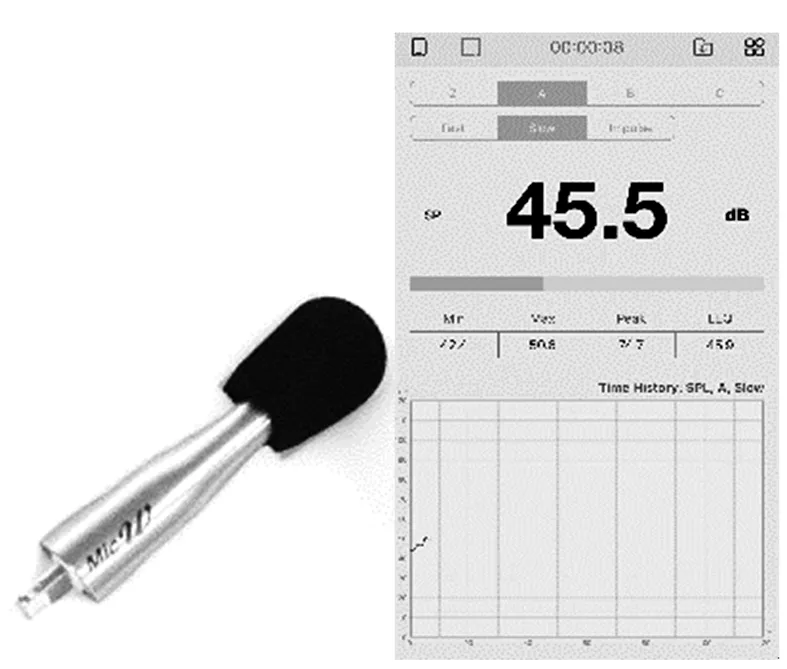
图1 MicW-i437L传声器和NoiseLab软件示意图
2.3 飞行轨迹
利用无人机自动巡航功能,参照《FAR-36》的附件J,设定飞行高度为H=120 m,由于考虑到测试的A计权最大声压级数据要高于环境的背景噪声15 dB(A)以上,才能使得噪声数据有效,同时考虑到微小型无人机重量较轻、旋翼电机功率较小、叶尖马赫数较低、产生噪音较低,另外进行附加的H=100 m、H=50 m、H=10 m、H=5 m高度巡航进行测试,在飞行时,自动定高飞行程序可以将飞行高度的偏差控制在上下0.5%的范围内,在上述飞行高度的偏差下,声音衰减幅度较小,本试验研究将上述偏差带来的噪声影响值忽略[14]。另外,在无人机起飞前,将环境噪声以A计权声压级进行记录,并分析环境噪声的频谱图,环境噪声频率多集中在2 000 Hz以下,如图3频谱图所示,符合噪声采集要求,而后再进行无人机起飞操作。进行飞行噪声测试的轨迹示意图,如图4所示。
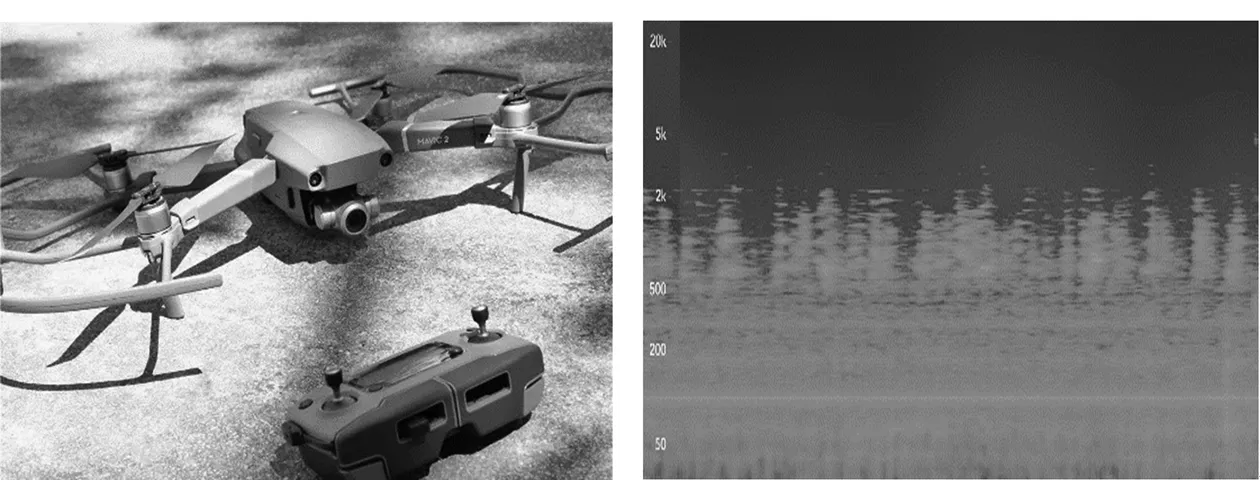
图2 大疆“御Mavic 2 Pro”旋翼无人机 图3 某次测试前的环境噪声频谱
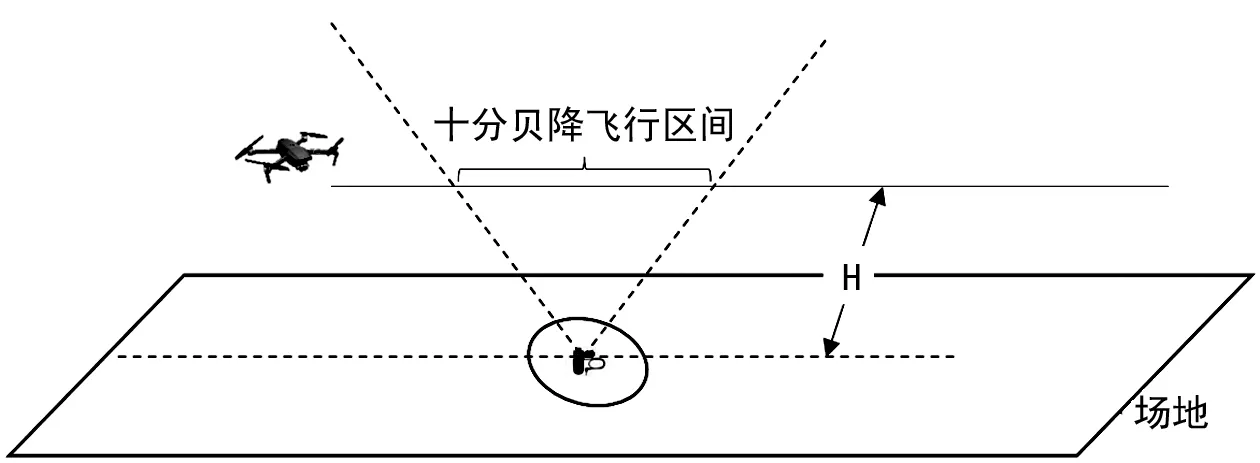
图4 微小型无人机飞行噪声测试轨迹示意图
2.4 10 dB降区间的确定
《FAR-36》附件J中规定轻型旋翼机在噪声测量和分析时可用声暴露级(SEL)单位进行噪声大小的测量。在测量过程中,需要维持旋翼无人机最大功率转速进行飞越操作,从而获得可能的最大噪声。而用以计算声暴露级(SEL)的数据应该是在最大的A计权声压级(LAMAX)数据的范围以内。所选取的数据范围即为左端和右端均为LAMAX-10 dB。需要注意的是,该处的10 dB降区间和计算有效感觉噪声级(EPNdB)的10 dB降区间有所不同[15],如图4中所示的“10 dB降区间”。
3 测试案例
3.1 A计权声压级
将不同频率的声压级计权相加,得到声音的声压大小,构成了声压级。而A计权声压级考虑了人耳对于不同频率的响应水平,如果声压级没有进行A计权[16],测得的数据可能不能更为真实地反映实际人耳获得的声压级大小。相应地,还有B、C和Z计权等等,本次测试选用A计权声压级作为测试和计算的数据基础,测量时声级计的动态采样速率选择Slow,时间间隔Δ设置为0.5 s。在集声器进行声压级采集前,需要进行校准操作。
3.2 环境修正因子
环境因素对于影响室外声音传播的三个最常见的环境因素是风、温度和湿度。以空气的温度为20 ℃,相对湿度为20%为例,衰减系数α和频率f的关系如图5所示。环境湿度越大,声音衰减程度越小[17]。测试进行前,进行温度与相对湿度记录。
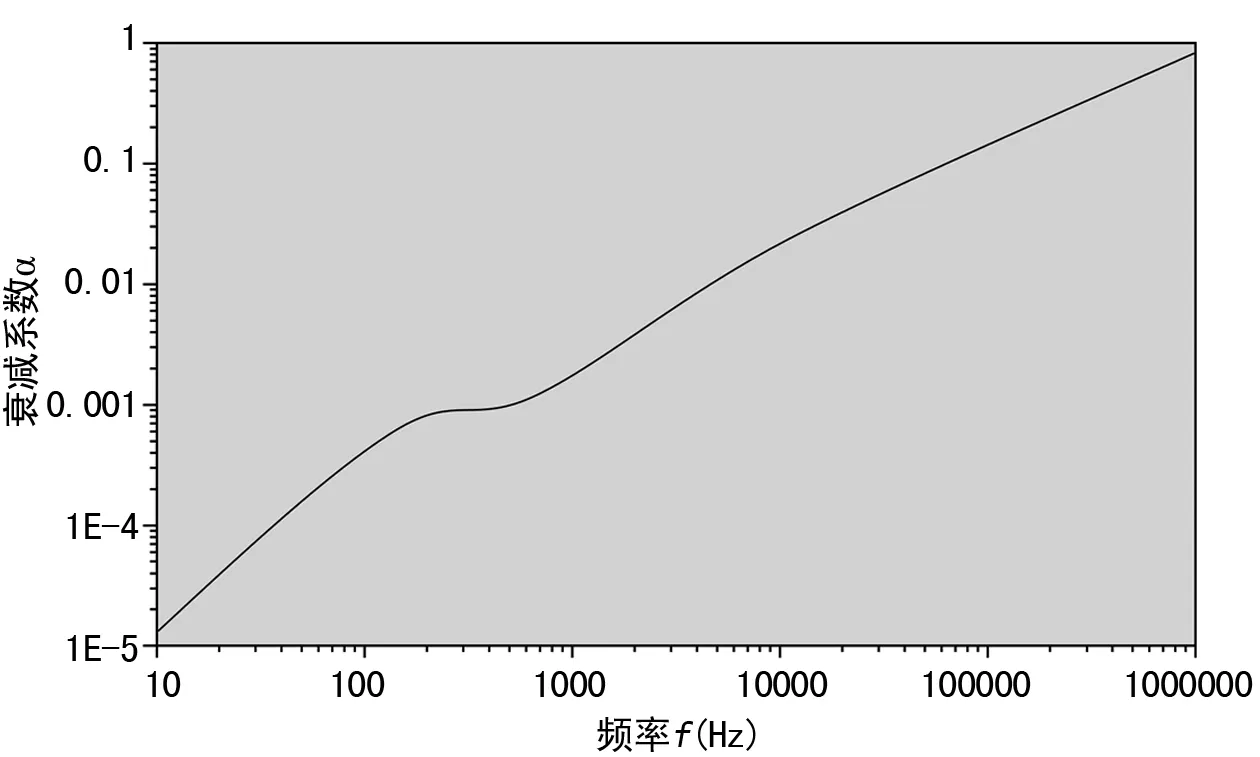
图5 某条件下衰减系数α和频率f的log-log曲线
3.3 声暴露级的计算
式中:t0是基准整合时间,计算为(t2-t1);A(t)是随时间t变化的A计权声压;0是单位时间的基准声压级。权声压级计算时,可用如下公式求解:
其中LA(t)随时间t变化的A计权声压级,以上两式中t1-t2时间区间应在10 dB降区间内[18]。
为了进一步加速计算,可以采用经认证的近似算法:
SEL=LAMAX+ΔA
其中ΔA可以根据下式计算:
ΔA=10log10(T)
其中T=(t2-t1)/2,LAMAX是10 dB降区间中A计权声压级的最大值。
3.4 高度为120 m的飞越噪声测试
设定旋翼无人机的垂直高度为120 m,水平飞行速度为最大功率巡航速度。测试所得数据经NoiseLab记录并平滑处理后[19],见图6。
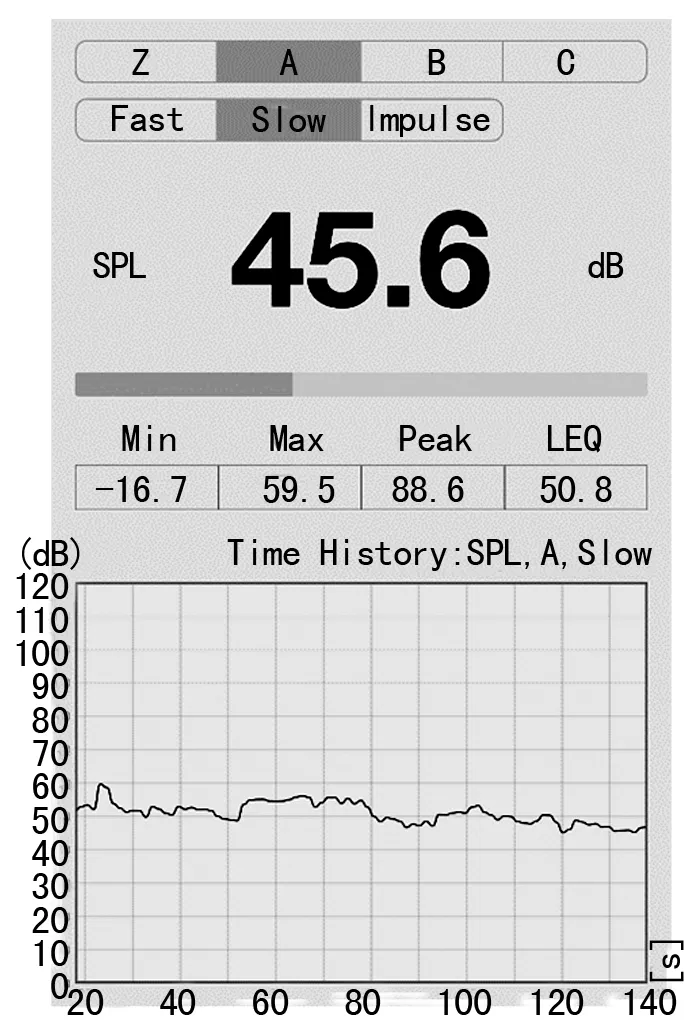
图6 120 m高度下NoiseLab噪声记录界面
使用NoiseLab导出测得的噪声数据,根据公式:
采用认证的近似算法,简化计算过程后的数据如表1。

表1 高度为120 m的噪声测试数据
由表1数据分析和图6所示,明显由于飞行高度过高,噪声在传播过程中衰减过大,因而无法确定10 dB降区间,同时A计权的最大声压级只超过环境噪声1.7dB(A),因此远远无法满足测试条件,其余的5组试验没有必要再进行。对于本款微小型无人机而言,120 m的垂直飞行测试高度过高,声音衰减过大,故无法完成该高度下的噪声测试,因而继续降低垂直飞行高度进行下一组测试。
3.5 高度为100 m的飞越噪声测试
设定旋翼无人机的垂直高度为100 m,水平飞行速度为最大功率巡航速度。测试噪声数据如表2。
测试结果与高度为120 m的结果类似,依然无法确定10 dB降区间,因此高度为100 m的距离也不适合本次微小型无人机噪声测试。

表2 高度为100 m的噪声测试数据
3.6 高度为50 m、10 m、5 m的飞越噪声测试
分别设定旋翼无人机的垂直高度为50 m、10 m、5 m,水平飞行速度为最大功率巡航速度。测试噪声数据经过计算后如表3~5所列。
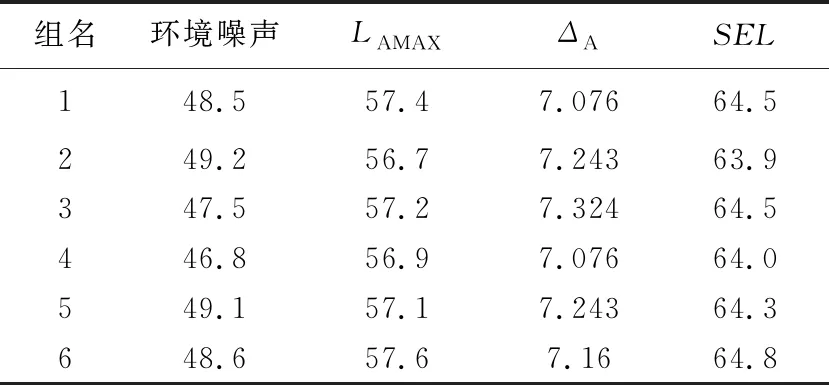
表3 高度为50 m的噪声测试数据
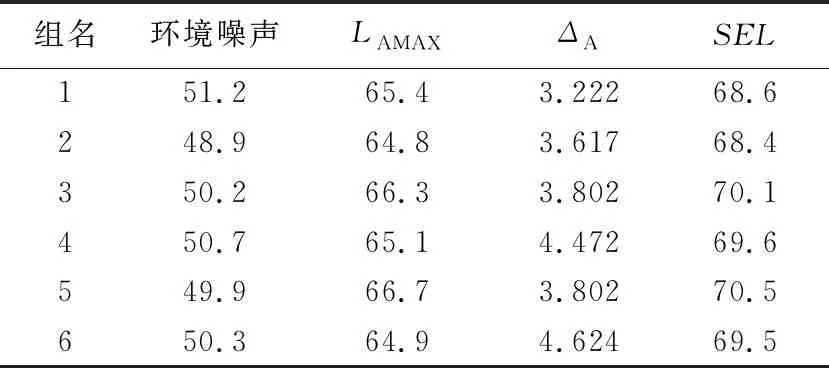
表4 高度为10 m的噪声测试数据
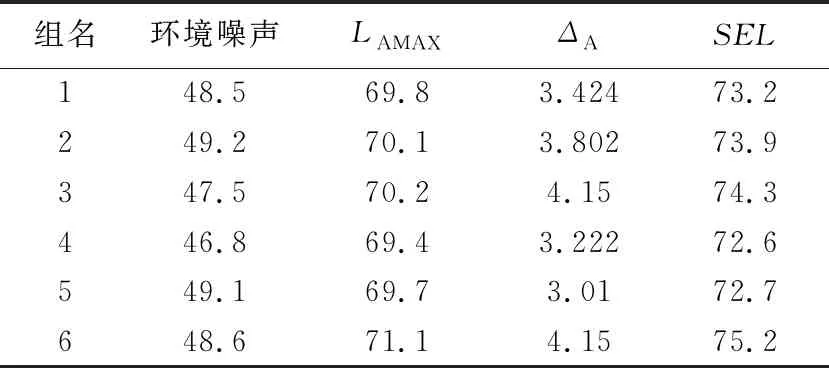
表5 高度为5 m的噪声测试数据
计算后的数据表明,高度为50 m的测试中,只有第2组声暴露级未超出环境噪声15 dB(A)以上,不满足本文研究的测试要求,而高度为10 m、5 m的声暴露级都满足条件要求。至少可见,针对文中测试的微小型旋翼无人机,飞行高度在50 m以下时进行测试是相对合适的。而高度为10 m、5 m的最终算得的声暴露级完全满足微小型旋翼无人机噪声适航测试的要求。
对于50 m及其以下的三组数据进行数据拟合,如图7所示。而当飞行高度为10 m时,分析测试的10 dB降时间区间,即有效飞行时间(t2-t1)的数值如表6所示。
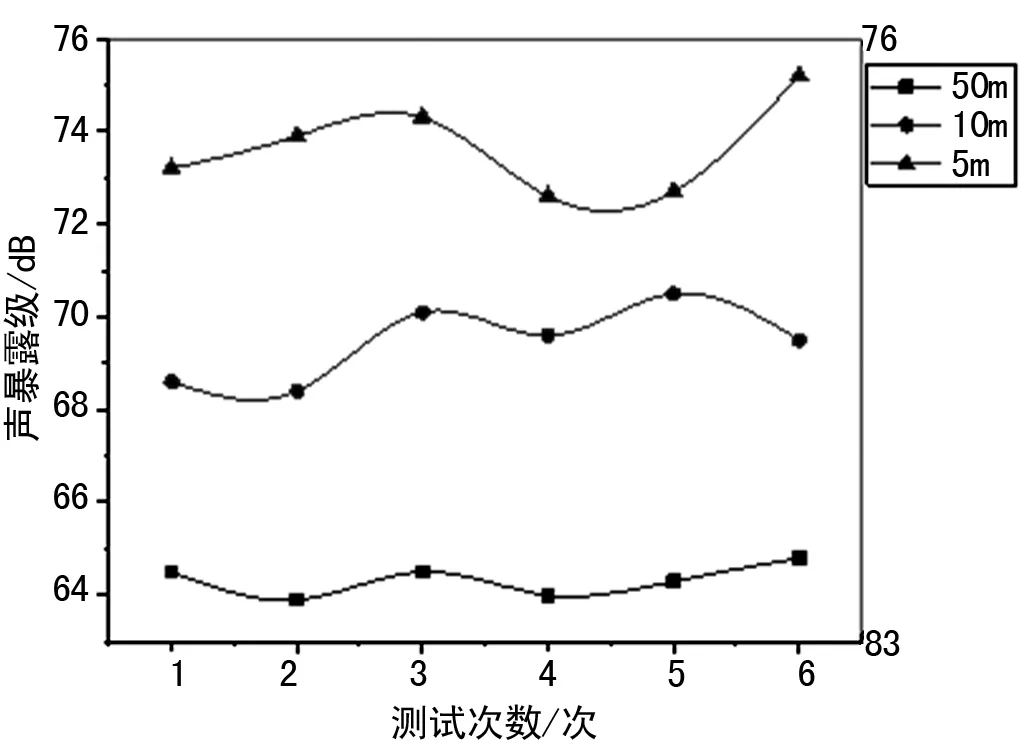
图7 高度为50、10、5 m时的声暴露级拟合比较

表6 高度为10 m的噪声测试时间区间
4 结论与展望
对微小型无人机噪声试验进行探索,以《FAR-36》部中的附件J作为测试参考依据。进行了五组环境和设备均符合要求的飞行试验,初步探究了微小型旋翼无人机噪声适航测试时适用的高度。结果表明:
(1) 需要调整微小型旋翼无人机的飞行高度来进行试验,否则噪声数据受环境干扰大,数据可信度低,不可作为适航审定依据。从图7中可以得出50 m高度测试时,数据偏差较小,但这是由于该高度下旋翼无人机噪声衰减较多,从而未能特别有效区分无人机本身噪声与环境的干扰噪声。而在5 m高度测试时,10 dB降区间时间短,即测试时旋翼无人机有效飞行时间短,虽然声暴露级在第六次测试时出现了相较于前五次明显的偏差,但整体噪声测试数据满足测试要求。此次研究,受限于场地设备租用、计算过程量大、飞行报备等因素,每组高度进行了6次测试,后续可通过增加测试组数,或适当提升飞行高度来尽可能减少随机因素对于整体噪声数据有效性的影响。而对于飞行高度为10 m的声暴露级数据,数据相对稳定,旋翼无人机有效飞行时间和操作时间都相对充裕,有较强的抗干扰特性,比较适合进行噪声适航测试。
(2) 当调整为合适的测试高度后,文中50 m以下时,数据可信。特别是在高度为10 m和5 m时,除了数据满足高于环境噪声规定值15 dB(A),同时避开了环境噪声干扰的数值,由表6可见,时间区间长度对于声样采集来说,处于一个较为合适的区间,为5 s左右,能够有效减少无人机控制过程中可能出现的影响,同时也不至于采样时间太短而增加数据失真的几率。
综上所述,对于微小型旋翼无人机噪声适航测试,可以利用飞行时声暴露级的测试方法。在飞行测试时,飞行高度对于噪声数据采集的影响较大,本文通过对不同飞行高度的噪声测试分析,研究了可供参考的微小型旋翼无人机噪声测试方法,从而可以为微小型旋翼无人机噪声测试分析研究,特别是适航测试方法的制定提供相关参考依据。