除雪铲分段式避障结构设计与铲刃分析*
2021-01-12屈文涛王泽威薛亚刚李志栋
屈文涛,吕 曌,王泽威,薛亚刚,李志栋
(1.西安石油大学 机械工程学院,陕西 西安 710065; 2.陕西汽车控股集团有限公司,陕西 西安 710200;3.陕西重型汽车有限公司,陕西 西安 710200)
0 引 言
我国的北方许多地区,每年都存在较长的降雪期,积雪与结冰现象容易诱发交通事故,影响正常交通[1]。大多情况下要求使用符合我国实际的机械除雪车进行道路清雪任务,却忽略了专用除雪机械在冬季的闲置时间较长,而清洗车作为城市道路环卫主要车辆,需求大且使用频次高,清洗/除雪一体化车在除雪作业时,装载除雪装置,在非除雪作业时,装载清洗装置即可进行清洗作业[2]。郭春凤[3]等针对除雪铲提出的三种避障方式虽然都能够迅速达到躲避障碍物的目的,但其设计的结构避障时需要整个除雪铲板面运动,增大了避障时的阻力,且增大了经过障碍物时遗留的积雪面积,增加二次清理过程,降低了除雪效率。
笔者基于清洗/除雪一体化车除雪铲避障模块结构优化,设计了一种高效轻便的除雪铲分段式避障模块结构,并以除雪铲铲刃作为研究对象,通过Pro/E软件进行除雪铲铲刃参数化建模,采用ANSYS有限元分析除雪铲铲刃在工作过程中的应力应变分布情况,为除雪铲避障模块结构优化提供理论依据。该除雪铲避障模块结构设计可以有效清除障碍物旁侧的积雪,减少遗雪量,提高除雪效率。
1 除雪铲分段式避障结构与工作原理
1.1 除雪装置结构组成及工作原理
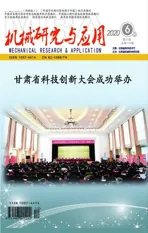
除雪装置主要由连接机构、液压系统、除雪铲铲板和避障模块组成,如图1所示。连接机构是将除雪铲固定在高压清洗车上的桥梁结构,主要包含与高压清洗车前部连接的后托架、铲板与前部连接的后托架和上连杆。液压系统执行机构作用于连接机构中间控制铲板升降和偏转完成集雪与抛雪任务,有效避免由于铲雪量过大引起的除雪铲阻力增大的问题,其中两个摆动油缸各安装于前托架和前部连接架间的两边,通过控制左右摆动油缸一伸一缩来实现铲板的左右偏摆;升降油缸连接前部连接架与上连杆,通过推动上连杆的旋转以实现铲板的提升与下降。除雪铲铲板采用一边高一边低的设计,能够保证除雪铲在0°使用时,也可达到通过板面弧度将积雪抛出的效果。
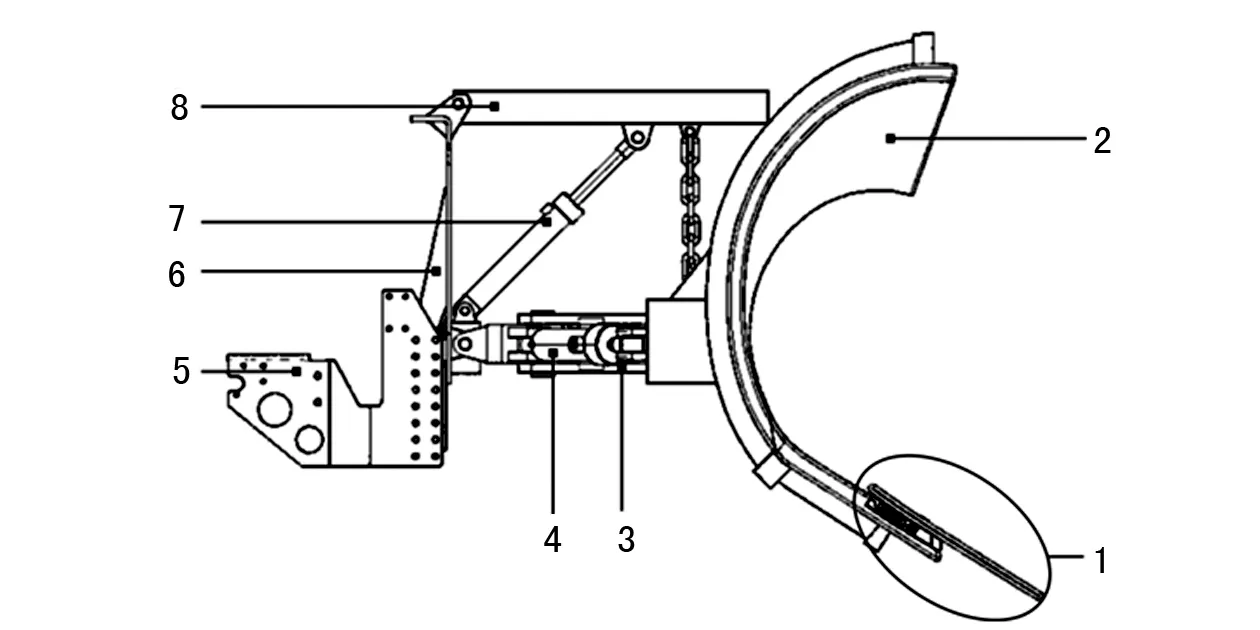
图1 除雪装置结构组成1.避障模块 2.除雪铲板 3.前托架 4.摆动油缸 5.前部连接架 6.后托架 7.避升降油缸 8.上连杆
1.2 分段式避障结构设计及工作原理
1.2.1 分段式避障模块结构设计
除雪铲分段式避障模块主要由除雪铲铲刃、固定滑槽、限位块、移动滑块、避障弹簧和铆钉组成,如图2所示。分段式避障模块位于图1所示除雪铲板前端,其中,避障弹簧一端与除雪铲板相连,另一端与滑动块通过铆钉与除雪铲铲刃相连,滑动块放置于左右两侧的固定滑槽内,在避障弹簧的作用下带动除雪铲铲刃伸缩,以实现避障功能;限位块位于除雪铲板最下端并与其通过铆钉固定用以限制避障弹簧在越过障碍物时过度伸长。当遇到障碍物时,与障碍物相对应的避障模块启动避障功能,翻越障碍物,无障碍物处除雪铲铲刃仍与地面接触,参与除雪工作,从而达到无障碍物处积雪仍能被清理的目的,减少遗雪量,提高工作效率。
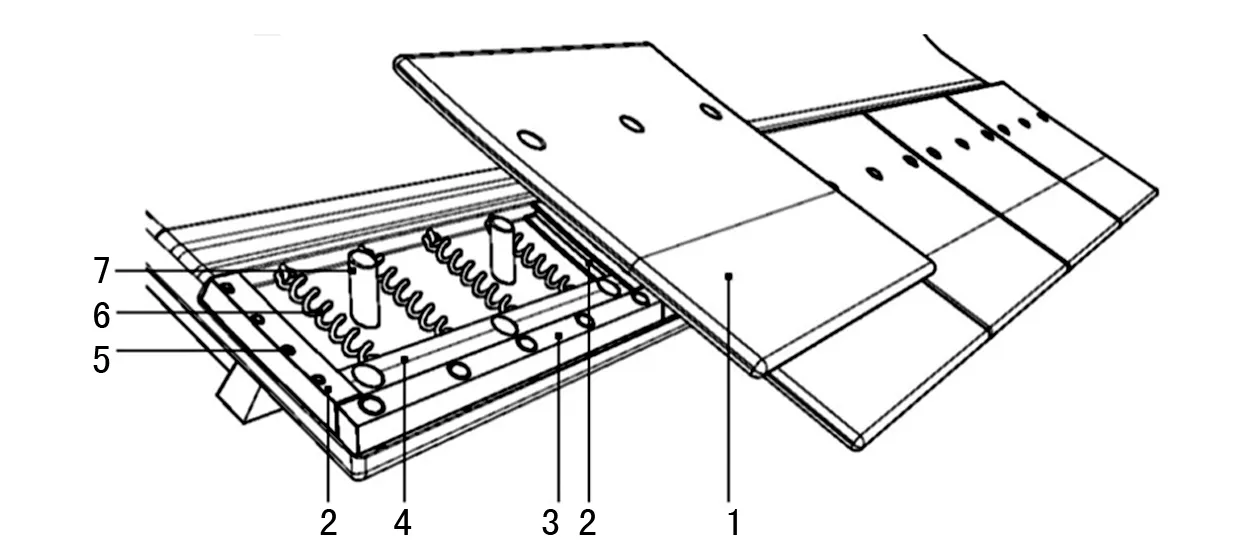
图2 分段式避障模块结构1.除雪铲铲刃 2.固定滑槽 3.限位块 4.移动滑块 5.锚固孔 6.避障弹簧 7.铆钉
1.2.2 分段式避障模块避障原理
当除雪铲进行除雪作业过程中,第二段避障模块遇到障碍物时,第二段除雪铲铲刃发生如图3所示的避障过程。
图3 避障过程示意图
如图3(a)所示第二段除雪铲铲刃受到来自障碍物向后的阻力F1,在力的作用下,避障弹簧受到向后的F弹,使避障弹簧收缩带动移动滑块沿固定滑槽向上移动,此时,与移动滑块连接的第二段除雪铲铲刃在力的作用下沿除雪铲板平面向上移动,使第二段除雪铲铲刃抬离地面翻越障碍物,无障碍物处除雪铲铲刃继续除雪作业,如图3(d)所示,保证障碍物旁的积雪也能被清除,降低遗雪量。在如图3(b)所示的翻越障碍物过程中,避障弹簧受压收缩产生的反作用力F弹′促使第二段除雪铲铲刃接触障碍物而行,并带动第二段除雪铲铲刃翻越障碍物。在如图3(c)所示越过障碍物之后,失去障碍物的阻力F1,此时,第二段除雪铲铲刃在避障弹簧的弹力F弹′的作用下,避障弹簧伸长,推动移动滑块沿固定滑槽向下移动,此时,与移动滑块连接的第二段除雪铲铲刃在力的作用下沿除雪铲板平面向下移动,直至移动滑块移动到限位块处,第二段除雪铲铲刃接触地面越过障碍物,即完成一次翻越任务。
2 除雪阻力计算
障碍物以单个橡胶减速带为例,橡胶减速带标准节段长度为380 mm,宽度为500 mm,高度为50 mm,取避障高度为130 mm[3],查常用材料摩擦系数表可知,除雪铲铲刃与橡胶减速带间的摩擦系数为0.49,冰雪密度为350~400 kg/m3时,除雪铲铲刃与冰雪间的摩擦系数为0.05[4]。除雪铲质量为860 kg,除雪宽度为2 800 mm,积雪厚度为100 mm,切削角为θ=30°,清洗/除雪一体化车的行驶速度为30 km/h[5]。
根据经验公式,车辆行驶时,除雪铲铲刃受到的阻力为:
F=μN/cosθ
(1)
式中:F为阻力,N;μ为摩擦系数;N为除雪铲铲刃受到的正压力,N;θ为切削角。
在除雪作业时,根据经验公式,则有:
(2)
式中:m为除雪铲的质量,kg;g为重力加速度,m/s2;ρ为冰雪密度,kg/m3;A为有效除雪面积,m3。
根据除雪阻力计算除雪铲铲刃的应力为:
(3)
式中:σ为除雪铲铲刃的许用应力,Pa;A′为除雪铲铲刃的有效面积,m3。根据式(1)~(3)可得除雪铲铲刃的许用应力σ=3.81×106Pa。
3 除雪铲的有限元分析
3.1 除雪铲铲刃模型构建
根据除雪铲铲刃尺寸,单个除雪铲铲刃长度为610 mm,宽度为336 mm,厚度为120 mm,在Pro/E中构建除雪铲铲刃三维模型并将简化后的三维模型导入ANSYS中进行有限元计算分析。根据设计要求对导入ANSYS结构分析中除雪铲铲刃模型的材料属性进行设置,除雪铲铲刃使用材料选用高碳钢,材料的密度为7 810 kg/m3,泊松比为0.28,弹性模量为2.0×1011N/m2,许用应力为3.55×108Pa。
图4 除雪铲铲刃简化模型
3.2 静力学分析
采用六面体网格对除雪铲铲刃模型进行网格划分,最终划分生成1556个单元格,3140个节点,根据式(2),分析时对除雪铲单个除雪铲铲刃加载积雪载荷Fx′=5 350 N,Fy′=1 780 N,Fz′=980 N,并选择限位块作为除雪铲铲刃的轴向约束。对除雪铲铲刃进行有限元计算分析,得到如图5所示的应力云图和如图6所示的总变形云图[6]。

图5 应力云图 图6 总变形云图
从图5的分析结果中可以看出,在设有限位块处下端的应力最大,主要是由于在限位块下端未设有肋板支撑,而限位块可以加厚上半部分除雪铲铲刃的厚度,因此在除雪铲铲刃由薄变厚的交界处应力最大,且最大应力为3.82×105Pa,在其理论计算的许用应力范围内。从图6的总变形分析结果中可以看出,除雪铲铲刃底部接触地面处变形最大,远离地面的部分变形越小,雪铲底部未设置肋板缺少约束导致其变形最大,清洗/除雪一体化车行驶时,除雪铲铲刃与地面滑动摩擦对除雪铲铲刃的磨损较大,故而导致与接触地面的除雪铲铲刃部分变形最大。
4 结 语
此次设计的除雪铲分段式避障模块结构,降低了经过障碍物时遗留的积雪面积,缩减二次清理过程,提高了除雪效率。通过理论计算除雪铲铲刃的许用应力,并应用有限元分析除雪铲铲刃应力应变情况,结果显示,最大应力为3.82×105Pa,在除雪铲铲刃的理论许用应力范围内,最大应变在除雪铲铲刃底端与地面接触处,在优化设计时需要考虑底端加厚的问题和薄厚交界处的过渡,以此来提高薄弱部分的强度,为除雪装置的设计提供理论参考。