基于线性自抗扰控制的海上无人艇航向控制
2020-10-13胡俊祥
胡俊祥,葛 愿*,刘 硕,叶 刚
(1.安徽工程大学 高端装备先进感知与智能控制教育部重点实验室,安徽 芜湖 241000; 2.北京优世达科技有限公司,北京 102433)
无人艇航向控制一直是研究无人艇运动控制领域的热点,随着控制理论不断发展,很多学者在设计无人艇航向控制系统时做了许多尝试。文献[1]设计了基于改进PID控制的无人艇航向控制系统,但是PID控制器在面对复杂海洋环境干扰时需要的控制精度还不够,系统鲁棒性一般。文献[2]提出了一种结合自适应控制、反步控制和变节构控制的方法,设计了无人艇航向控制自适应反步滑模控制律,系统鲁棒性较强,但是对被控对象建模精度要求较高。文献[3]提出了一种基于改进模糊预测控制的无人艇航向控制器,和传统PID控制器实验结果做了对比,仿真结果表明基于改进模糊预测控制的无人艇航向控制器航向跟踪速度更快更稳定。这些方法对被控对象数学模型精度要求高而且没有综合考虑海上风、浪、流干扰对无人艇海上航行造成的影响。
自抗扰控制由韩京清先生于20世纪90年代提出,自抗扰控制继承了PID控制不依赖被控对象的具体模型的优点。自抗扰控制由跟踪微分器(Tracking Differentiator,TD)、扩张状态观测器(Extended State Observer,ESO)和非线性状态误差反馈控制律(Nonlinear State Error Feedback,NLSEF)组成,扩张状态观测器将系统的外部扰动和内部扰动放在一起看成总扰动,然后对总扰动实时估计以及补偿。由于自抗扰控制可调参数较多,所以给参数整定工作带来一定难度,大多数情况下使用人工试凑的方法来整定参数。一种可行的解决方法就是优化控制器设计复杂度,即将自抗扰控制器进行线性化处理。高志强教授通过设计线性扩张状态观测器(Liner Extended State Observer,LESO)和线性状态误差反馈控制律(Linear State Error Feedback,LSEF)共同组成线性自抗扰控制器,克服了自抗扰控制需要整定的参数多且难的问题[4]。在综合考虑了无人艇难以精确建模和海上风、浪、流干扰对无人艇航向控制的影响的基础之上,研究在无人艇航向控制系统中引入线性自抗扰控制,并与基于自抗扰控制的无人艇航向控制系统进行了对比。
1 海上无人艇和环境干扰建模
无人艇航向控制系统示意图如图1所示。无人艇航向控制系统可以看成舵机模型和无人艇运动数学模型串联的系统。为了实现对复杂海况下无人艇的航向控制,首先需要建立无人艇运动学模型,然后建立无人艇舵机模型,最后建立风、浪、流干扰信号模型和航向控制器模型。
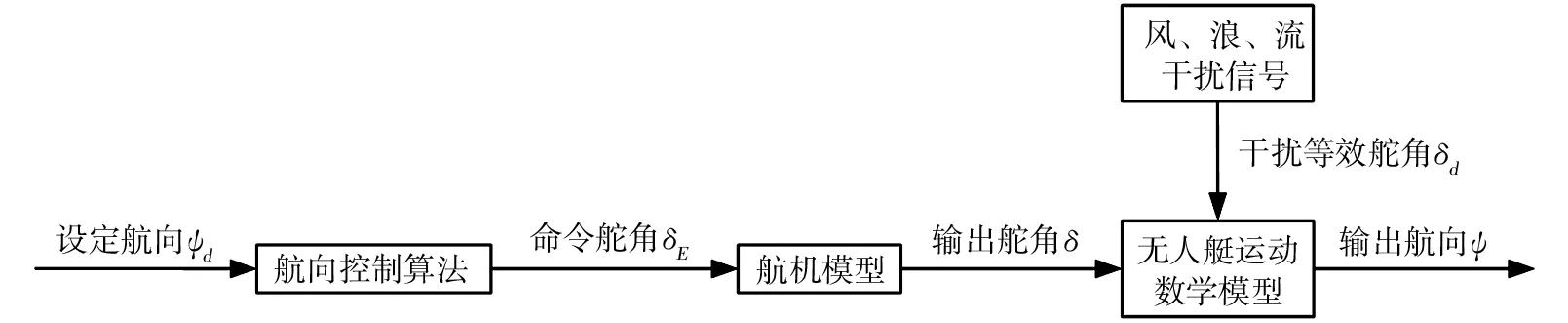
图1 无人艇航向控制系统示意图
1.1 无人艇运动学模型
重点研究无人艇空间运动3自由度模型,无人艇平面运动描述图如图2所示。其中,ψ为航向角;δ为舵角;V为无人艇运动速度[5]。

图2 无人艇平面运动描述图
根据无人艇平面运动模型建立如下无人艇运动方程[6]:
(1)
式中,u、v和r分别代表前进速度、横漂速度和转艏速度;m是无人艇的质量;xc是无人艇质心横坐标,当坐标原点o和质心重合时,xc=0;Izz是无人艇对oz轴惯性矩,z轴垂直x和y轴向下;X,Y,N分别为作用在3个坐标系上的外力。采用Abkowitz的方法,将无人艇做等速直线运动视为平衡状态[7],有u=v0=V,在平衡状态附近有u=u0+Δu,其中Δu是小量,将X,Y,N展开为Taylor级数形式并取其线性项,把无人艇运动方程两端线性化处理,整理后可以得到:
(2)
日本学者野本将上述模型简化为二阶并推导出著名的Nomoto模型:
(3)
式中,K0和T0为无人艇操纵性指数;K0是旋回性指数;T0是追随性指数。
1.2 舵机模型
舵机有死区、滞环、饱和等非线性特征,这些特征会或多或少影响海上无人艇控制系统性能[8]。舵机可以用下列模型表示:
(4)
式中,δE为命令舵角;TE为舵机时间常数(对于无人艇一般为5.4s);KE为舵机控制增益(通常约等于1)。


图3 舵机非线性模型
1.3 环境干扰建模
无人艇海上航行时常常会受到风、浪、流的干扰,仿真时风、浪、流干扰可以看作等效舵角附加在无人艇上[9]。海风可以看作脉动风,一般认为是某种白噪声,研究用零均值高斯白噪声表示海风所产生的干扰力矩,功率谱密度为0.1;海浪干扰可以看成低频的二阶波浪干扰力,其传递函数为:
(5)

2 无人艇航向自抗扰控制器和线性自抗扰控制器设计
2.1 无人艇航向自抗扰控制器设计
自抗扰控制由三部分组成:跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈(NLSEF)。跟踪微分器可以快速跟踪输入信号且不产生超调,其利用非线性函数来实现对输入信号广义导数的一种光滑逼近,合理提取微分。扩张状态观测器是自抗扰控制器的灵魂,可以实时估计系统的内部扰动和外部扰动。将跟踪微分器和扩张状态观测器部分输出的系统状态变量误差及扩张状态观测器部分输出的扰动补偿,进行适当的非线性组合,得到非线性误差反馈律[10]。以二阶自抗扰控制器为例,假设一类不确定的控制对象为:

(6)


图4 自抗扰控制系统原理图
(1)跟踪微分器。计算机本身为离散系统,为了避免颤振现象,二阶跟踪微分器(TD)采用离散形式[11]:
(7)
式中,v(k)是输入信号;x1(k)跟踪输入信号v(k);x2(k)跟踪v(k)的微分;r是速度因子,反应跟踪速度快慢;h是采样步长,如果将fhan(x1,x2,r,h)中h改为h0可以实现滤波效果,通常h0=2~5h。离散系统最速控制综合函数fhan(x1,x2,r,h)公式如式(8)所示:
(8)
(2)扩张状态观测器。为了便于计算机处理,减少计算量,三阶扩张状态观测器(ESO)采用离散形式:
(9)
扩张状态观测器(ESO)是ADRC的核心,ESO通过对作用于系统的总扰动进行实时估计和观测,通过合适的补偿,把含有未知扰动的、内部不确定的系统补偿成线性积分器串联标准型系统。其中,z1,z2是状态变量的观测;z3是对系统总扰动的估计;b为扰动补偿因子。
(3)非线性状态反馈控制律。在研究非线性误差时,在系统稳定的前提下,为了尽可能地减小甚至消除误差,采用的NLSEF离散形式如下:
(10)
式中,e1,e2为状态误差;k1和k2为反馈控制增益;非线性状态反馈可以减小系统的稳态误差,与跟踪微分器给出的安排过程和扩张状态观测器的状态估计结合生成需要的控制量。
2.2 无人艇航向线性自抗扰控制器设计
下面以二阶线性自抗扰控制器构成的系统来说明线性自抗扰控制器原理。将式(6)用状态方程表示可以得到:
(11)
式中,b0是b的估计值,一般要求b=b0。线性状态观测器将内部扰动和外部扰动相结合作为新的扩展状态r(t),即总扰动。研究中将无人艇系统内部噪声干扰和风、浪、流干扰看成总扰动。
r(t)=f(x1,x2,w,t),
(12)

(13)
即
(14)

对式(11)建立如下线性扩张状态观测器(LESO),x3可以被LESO观测:
(15)
在连续域分析LADRC时,控制器参数整定范围大[12],根据计算机本身特性,采用LESO离散形式:
(16)

为了对扰动进行补偿,设计线性状态误差反馈控制律(LSEF),可以得到:
u0(k)=k1e1(k)+k2e2(k),
(17)
式中,有e1(k)=v1(k)-z1(k),e2(k)=v2(k)-z2(k),线性自抗扰控制的控制量为:
(18)
可见,线性化后LSEF只需要调节k1和k2两个参数。
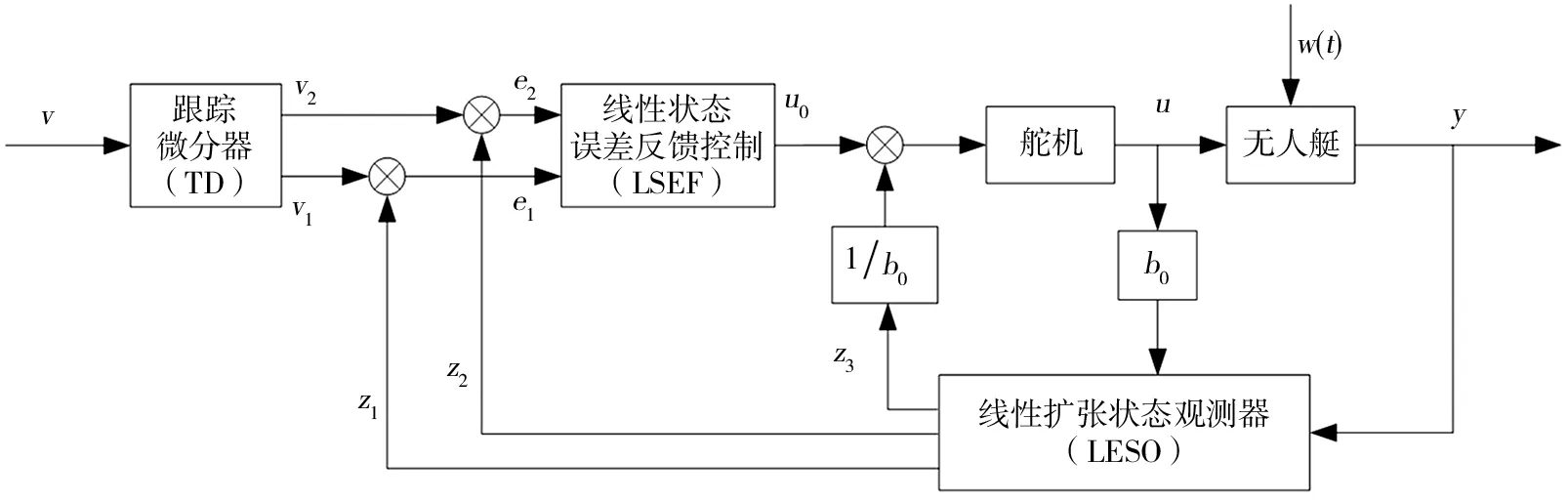
图5 基于线性自抗扰控制无人艇航向控制系统原理图
3 仿真结果分析
仿真实验中使用的海上无人艇参数如表1所示。

表1 海上无人艇基本参数表
无人艇Nomoto模型如下:
(19)
自抗扰控制器仿真参数:
TD:r=20,h=0.1,h0=0.5;ESO:β1=20,β2=25,β3=20,δ1=0.05;
NLSEF:k1=1.7,k2=20,α1=0.5,α2=0.25,δ2=0.05。
线性自抗扰控制器仿真参数:
TD:r=20,h=0.1,h0=0.5;LESO:ω0=3.5;LSEF:k1=0.81,k2=4。
(1)无干扰时设定航向20°、120°时自抗扰控制器和线性自抗扰控制器仿真结果如图6、图7所示。由图6、图7可知,在无干扰情况下自抗扰控制器和线性自抗扰控制器都能在较好地满足快速性的同时,不产生超调,二者性能几乎一样。给定20°航向角时自抗扰控制器达到给定航向的速度和线性自抗扰控制器相比没有优势,但是从舵角反馈看线性自抗扰控制器操舵所需要的能量略低。给定120°航向角时二者都表现了优秀的性能,不论是静态性能还是动态性能。

图6 无干扰时设定航向20°时输出航向角和舵角
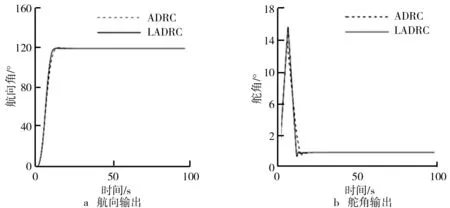
图7 无干扰时设定航向120°时输出航向角和舵角
(2)风、浪、流同时干扰设定航向20°、120°时自抗扰控制器和线性自抗扰控制器仿真结果如图8、图9所示。由图8、图9可知,从控制器性能上看,自抗扰控制器和线性自抗扰控制器在面对外界环境干扰时都表现出优异的控制性能。二者输出均较为稳定,即使在面对大的航向角变化时系统依旧有着很强的鲁棒性。实验证明了在有外界环境干扰的情况下,在参数整定合理的情况下线性自抗扰控制器和自抗扰控制器控制性能相差无几,但是线性自抗扰控制器需要整定的参数比自抗扰控制器少很多,操舵所需能量更低。

图8 风、浪、流干扰下设定航向20°时输出航向角和舵角

图9 风、浪、流干扰下设定航向120°时输出航向角和舵角
4 总结
研究基于线性自抗扰控制设计了海上无人艇航向控制系统,仿真结果表明研究设计的基于线性自抗扰控制的海上无人艇控制系统对海洋环境未知干扰具有良好的稳定性和鲁棒性,航向控制效果理想。与传统的自抗扰控制器相比,研究引入的线性自抗扰控制器设计难度大大降低,这为解决无人艇自抗扰控制器参数整定问题提供了一种新的解决思路。
