基于Hough变换圆检测和边缘模板匹配的轴承缺陷检测与定位
2020-10-13段志达魏利胜刘小珲
段志达,魏利胜*,刘小珲,2,丁 坤
(1.安徽工程大学 电气工程学院,安徽 芜湖 241000;2.上海欧朔智能包装科技有限公司,上海 201416)
轴承作为日常生活中大量使用的元件,在生产过程中其表面可能会产生磕碰、划痕、锈斑等缺陷,且轴承滚子也存在漏装、缺失等现象。如果采用人工检测方式对轴承缺陷进行检测,不仅速度慢、效率低,且影响检测精度的因素多。机器视觉技术在很多领域已被广泛应用,基于其快捷、灵活、抗干扰能力强的特点,可实现对不同检测任务快速准确的定位和识别。将机器视觉引入轴承表面缺陷和滚子漏装缺陷的自动检测中,以提高轴承缺陷检测速度和精度,具有十分重要的意义。
国内外相关学者对基于机器视觉技术的轴承滚子检测方法已进行了广泛的研究,并取得了丰富的成果。尚军[1]等提出了基于预测匹配差与全局-局部阈值化的轴承缺陷检测与定位算法,实现了对滚动体缺失、破损的准确检测与定位;崔明[2]等针对轴承图像的特点,在对图像进行滤波、灰度增强和二值化的基础上,采用了一种基于环形区域的边缘搜索和最小二乘圆拟合相结合的圆检测法;秦钟伟[3]等提出一种将机器视觉应用于轴承滚动体数目和尺寸检测的检测方法;邓耀力[4]通过将图像预处理法、基于区域灰度值分割法和基于区域形态学的最小二乘法等方法相结合,实现了对轮毂轴承缺陷的有效检测;陈昊[5]等针对轴承滚子表面缺陷人工检测效率低、误检率高的问题,提出了一种基于图像光流的轴承滚子表面缺陷的检测方法;李龙[6]等针对轴承滚子表面缺陷的特点及检测条件,提出了一种将图像形态学滤波、多项式拟合、二值图像处理相结合的方法,实现了滚子表面缺陷的在线实时检测;Wei[7]等针对SSDA匹配算法易受噪声和光照影响的问题,通过进一步结合CLD和EHD算法,提出了一种混合信息匹配方法,增强了模板匹配算法的鲁棒性;陈金贵[8]等为了提高轴承滚子表面缺陷检测的效率,采用改进的Niblack算法对轴承滚子表面图像进行处理以分割出缺陷区域。实验表明,该方法不仅可以有效地检测出轴承滚子的各类缺陷,且在检测效率和精度上优于传统阈值分割算法;张天飞[9]等提出了一种改进模板匹配算法,实现了对物体的正确匹配,且算法具备一定的鲁棒性和实时性;李伟[10]等针对工业检测中球栅阵列(BGA)检测易受遮挡、桥接、变形等因素影响,难以进行大批量高精度自动化检测的问题,提出了一种基于形状的自适应模板匹配方法进行BGA焊点检测的算法,实现了对复杂背景情况下的BGA焊点进行准确提取和检测;冯春贵[11]等针对传统的模板匹配法对于限速标志的识别容易出现拒识和误识的问题,提出一种改进的模板匹配算法应用于限速标志的识别中;安培源[12]等为了解决机器视觉系统对具有小直径特征的多圆进行定位时计算量过大的问题,提出一种基于边缘检测和Hough变换的圆定位改进方法,检测精度可达0.06 mm;魏利胜[13]等针对工业流水线中轴承工件人工检测及装配效率低的问题,提出一种基于高斯加权均值分割的轴承滚子检测和轴承保持架支柱定位方法,实现了轴承滚子的准确检测,推导出目标轮廓的重心坐标,实现轴承保持架的准确定位;韩美林[14]等针对传统同态滤波算法对彩色图像的改善效果并不理想的问题,提出了一种结合有限对比度自适应直方图均衡(CLAHE)和改进型同态滤波的算法,有效提升了彩色图像的亮度和对比度;田原嫄[15]等为了准确、快速地定位行进中的车牌,采用HSV空间色彩划分法,保持图像的色度不变,并对图像的饱和度和亮度分别做相应的同态滤波处理,从而对行进中的车牌进行定位检测。
以上研究主要探索了稳定光源环境下的轴承缺陷检测,缺少对缺失滚子区域的精确定位,同时检测精度受轴承源图像阈值分割精度的影响,鲁棒性较差。为此,在以上研究的基础上,提高检测算法的鲁棒性,实现缺失滚子的精确定位,提出了融合Hough圆检测算法和边缘模板匹配算法的轴承滚子检测方法。首先通过同态滤波算法增强源图像后,对灰度图像进行自适应阈值分割;在此基础上利用Hough圆检测算法进行滚子区域粗定位,提取出感兴趣区域;然后利用边缘模板匹配算法筛选出真正的滚子区域,剔除非滚子区域;最后结合最小二乘拟合算法定位缺失滚子区域,实现缺失滚子的检测与精确定位,避免由于光照环境变化导致的误检率,提高了轴承滚子在不同环境下的检测精度。
1 轴承滚子检测与定位算法
为了提高轴承滚子检测的精度和稳定性,研究一种基于Hough变换和边缘模板匹配的轴承滚子检测方法,主要分为四步:第一步,图像预处理阶段,利用同态滤波算法对图像进行光照矫正,提高图像对比度;第二步,利用Hough变换进行圆检测,对轴承滚子进行粗定位,提取感兴趣区域;第三步,利用边缘模板匹配算法对每一个粗定位区域和匹配模板进行匹配,去除误检区域,实现精确定位;第四步,利用检测到的滚子定位点进行圆拟合,进一步对缺失滚子进行定位。算法流程图如图1所示。
1.1 同态滤波预处理
针对轴承图像存在的光照不均匀和低对比度的问题,研究采用同态滤波算法对获取的轴承图像进行滤波增强。实验效果图如图2所示。由图2可知,图2a和图2c分别为强光下和弱光下的轴承图像,图2b和图2d分别为其对应的同态滤波图像。从图2可以发现,不同光照背景下的图像经过同态滤波后对比度得到增强,滚子区域与其他区域的区分度更高,并且与原始图像相比,光照分布比较均匀,避免了由于光照不均匀引起的图像降质。
1.2 轴承滚子粗定位
由于轴承滚子的边缘形状是圆形,和轴承的其他部件形状有明显的区别。采用Hough圆检测算法粗定位滚子位置,相关实验效果图如图3所示。图3a是经过同态滤波处理的图像,图3b是Hough圆检测算法检测到的滚子轮廓的图像,可以发现图中的噪声点很少,检测效果较为理想,依据这些轮廓点进行圆拟合可以得到相应的圆心坐标(对应图3c中小圆圈所在位置)。当所检测到的滚子圆心位置不在滚子轮廓的中心位置时,会导致基于Hough圆检测方法直接对轴承滚子的误检发生,其原因主要是图3b中存在的噪声点或检测到的相邻滚子轮廓点距离较近。为了进一步分析基于Hough圆检测算法的轴承滚子粗定位中出现的误检问题,根据Hough圆检测算法计算出检测到的滚子轮廓圆心坐标和滚子半径,并在原始图像中提取出对应的矩形区域作为感兴趣区域,以降低误检率。具体方法为:以检测出的轮廓圆心坐标为矩形感兴趣的中心坐标,两倍滚子半径为该矩形区域的边长,然后在原图像上截取出该感兴趣区域,结果如图4所示。图4中是提取的感兴趣区域的图像,为了便于显示,对实验结果图进行适当地缩放。图4a表示有效的轴承滚子区域,图4b表示无效的轴承滚子区域,即需要进一步剔除的感兴趣区域。由图4可以发现,基于Hough圆检测算法定位到的区域中不仅具有滚子区域,还含有非滚子区域,需要筛选出有效的滚子区域。因此,针对基于Hough圆检测的结果,结合边缘模板匹配的方法对无效的轴承滚子区域进行筛选,以进一步提高滚子的准确检测和精确定位。

图3 轴承滚子的圆检测结果

图4 感兴趣区域获取
1.3 轴承滚子精确定位
由于轴承滚子边缘形状是圆形的,在滚子边缘处变化比较明显,和轴承其他部分具有明显差别。因此,针对提取出的感兴趣区域,运用边缘模板匹配算法对轴承滚子图像进行匹配筛选,具体如下:
(1)根据模板图像的边缘检测结果计算边缘点的水平方向梯度值Gx、竖直方向上的梯度值Gy,以及所有边缘点的梯度强度,其梯度强度的计算公式为:
(1)
式中,G表示边缘点的梯度强度。


(4)计算模板图像T边缘梯度和感兴趣区域图像S边缘梯度的相似性度量,根据相似性度量的大小实现感兴趣区域图像和模板图像的匹配。相似性度量的计算可以表示为:
(2)
式中,E表示模板图像T边缘梯度和感兴趣区域图像S边缘梯度的相似性度量,如果模板模型与感兴趣区域图像之间存在完美匹配,则此函数将返回分数1,如果搜索图像中不存在该对象,则分数将为0。
假设感兴趣区域的个数为z,阈值为T,研究将轴承滚子模板边缘点的中心坐标(Tix,Tiy)(i=1,2,…,z)和感兴趣区域中心坐标(Six,Siy)(i=1,2,…,z)之间的欧氏距离作为筛选标准,计算公式为:
(3)
式中,Di表示轴承滚子模板边缘点的中心坐标和第i个感兴趣区域中心坐标之间的欧氏距离。
至此将进行感兴趣区域的筛选,具体流程如图5所示。

图5 感兴趣区域筛选算法流程图
经过边缘模板匹配后的感兴趣区域中可有效剔除不符合要求的部分,如图6所示。图6a为不同光照下的原始图像,图6b中矩形框区域是Hough检测算法粗定位到的滚子区域,可以发现检测结果存在误检情况,而利用边缘模板匹配算法剔除感兴趣区域中的无效滚子区域后,误检情况得到有效消除,如图6c所示,实现了对已装配滚子的准确检测。相关实验数据如表1所示。从表1可以发现,在不同背景下的轴承图像中,Hough圆检测算法均可检测到所有的已装配滚子,但是会产生误检情况,对源图像A和源图像B检测到的滚子数量分别为18和20,经过边缘模板匹配算法进一步筛选后,检测到的滚子数与实际滚子数相同,均为15,由此可见,引入边缘模板匹配算法有效提高了轴承滚子检测的准确率。

图6 装配滚子检测定位结果

检测滚子数目源图像A源图像B实际滚子数目1515传统Hough圆检测法1820本文方法1515
1.4 漏装滚子区域定位
在工业中,轴承生产过程中出现滚子漏装的问题时,需要对缺失位置进行滚子的再次装配。下面将针对实际检测结果中存在缺失滚子的位置进行自动定位,具体过程如下:
(1)获取所有检测到的已装配滚子的定位点,利用最小二乘法进行圆拟合,从而得到拟合圆的圆心坐标(a,b)以及拟合圆的半径R。
(2)在拟合圆上找出相邻点的圆心角为2π/16的16个点,分别记为(x1,y1),(x2,y2),…,(x16,y16),确定漏装滚子定位点的坐标。设已装配滚子定位点的个数为m,坐标表示为(p1,q1),(p2,q2),…,(p16,q16),从所有已装配滚子的定位点中选出任意一个点作为拟合圆上的点(x1,y1),并令(c,d)=(x1,y1),与该点相邻的两个点满足下式:
(4)
式中,(x,y)是拟合圆上与点(c,d)相邻的点的坐标,与点(c,d)在拟合圆上形成的夹角大小为2π/16,符合条件的点共有16个。在此基础上,可以进一步确定漏装滚子的位置,漏装滚子位置定位的具体实现方法如下:
算法1:漏装滚子位置定位算法
Begin
(c,d)=(x1,y1)
c,d代入式(4)求解得点(x2,y2)和(x16,y16)
fork=3∶15
(c,d)=(xk-1,yk-1);
c,d代入式(4),求解得点(xk,yk);/*点(xk,yk)表示拟合圆上与点(c,d)相邻的点*/
end for
/*得到拟合圆上剩下的14个点后结束循环*/
/*将拟合圆上的16个点与每个轴承滚子定位点进行对比*/
fori=1∶16
forj=1∶m/*m为漏装滚子定位点的个数*/
判断拟合圆上该点是否与所有轴承滚子定位点都不重合,若都不重合,则记该点
为轴承滚子漏装定位点并保存该点
end for
end for
end

图7 漏装滚子区域中心点定位图
通过上述步骤可以确定漏装滚子区域定位点的坐标,结果如图7所示。由图7可见,*符号代表已装配滚子定位点,圆圈表示根据已装配的轴承滚子定位点进行圆拟合的结果,正方形符号代表漏装滚子区域定位点。
2 实验结果与分析
为了进一步说明所提算法的有效性和优越性,研究与传统预测匹配差阈值化法和高斯加权均值分割法进行对比实验。实验平台为Window 7操作系统,CPU为2.3 GHZ,内存2 G,编程环境Matlab R2016,相关实验效果如图8所示。由图8可以看见,图8a表示不同光照条件下的待检测图像,图8b表示使用文献[1]对检测图像进行轴承滚子定位的结果,图8c表示使用文献[13]对检测图像进行轴承滚子定位的结果,圆形框表示对已装配滚子定位结果;图9d表示使用文中方法对检测图像进行轴承滚子定位的结果,其中正方形框表示已装配和漏装滚子区域。从图8b、图8c、图8d第一幅图中可以看出,当光照较强并且比较均匀时,原始图像的阈值分割效果较好,文献[1]和文中所提方法的检测效果均比较好。从图8b、图8c、图8d第三幅图中可以看出,当光照较暗时,阈值分割效果稍差,文献[1]和文献[13]的检测结果会出现漏检现象,且无法对漏装滚子进行定位。从图8b、图8c、图8d第三幅图中可以看出,当光照不均现象比较严重并且图像中背景有阴影干扰时,文献[1]和文献[13]两种策略的检测效果较差。分析其主要原因为:文献[1]方法先通过局部阈值分割和全局阈值分割的方法获得滚动体边界,然后提出利用圆验证机制结和种子填充法提取感兴趣区域,最后计算滚动体区域中封闭轮廓的面积,并通过设置合理的面积阈值筛选出滚动体,但是由于图像阈值分割后很难区分轴承部分与阴影部分,阈值分割结果中轴承的轮廓不明显,从而导致基于预测匹配差与全局-局部阈值化的检测方法失效;而文献[13]先通过高斯加权均值分割获得轴承滚子二值图像,再利用边界追踪算法得到二值图像中的所有封闭轮廓,最后,根据所提轮廓筛选算法对非轴承滚子轮廓进行消除,但是由于通过高斯加权均值分割的二值图像的分割效果较差,所提轮廓筛选算法无法区分滚子和阴影部分,从而导致基于高斯加权均值分割的检测方法失效。文中所提方法在阈值分割效果较差的情况下,可以通过Hough圆检测算法实现轴承滚子的检测,虽然会产生误检情况,但是检测出的感兴趣区域中包含所有的滚子区域,产生的误检区域可以利用边缘模板匹配算法筛选得到有效的滚子区域,最后结合最小二乘拟合算法实现缺失滚子位置定位,实验结果表明所提方法在不同的光照环境下都可以实现轴承滚子的有效检测。

图8 轴承滚子检测效果对比图
轴承滚子检测结果对比效果实验数据如表2所示。由表2可知,文献[1]和文献[13]的方法在不同光照条件下的轴承滚子检测准确率波动较大,无法在不同检测条件下实现稳定准确的检测。而文中所提方法的轴承滚子检测准确率相比于文献[1]方法提高了29%,与文献[13]方法相比提高了37%,充分说明所提方法对光照变化的抗干扰能力较强,在不同环境下具备良好的适应性,因此对不同光照条件下的轴承滚子均能实现准确、稳定的检测,并且检测速度在0.3 s左右,能够满足轴承滚子在线检测的实时性。
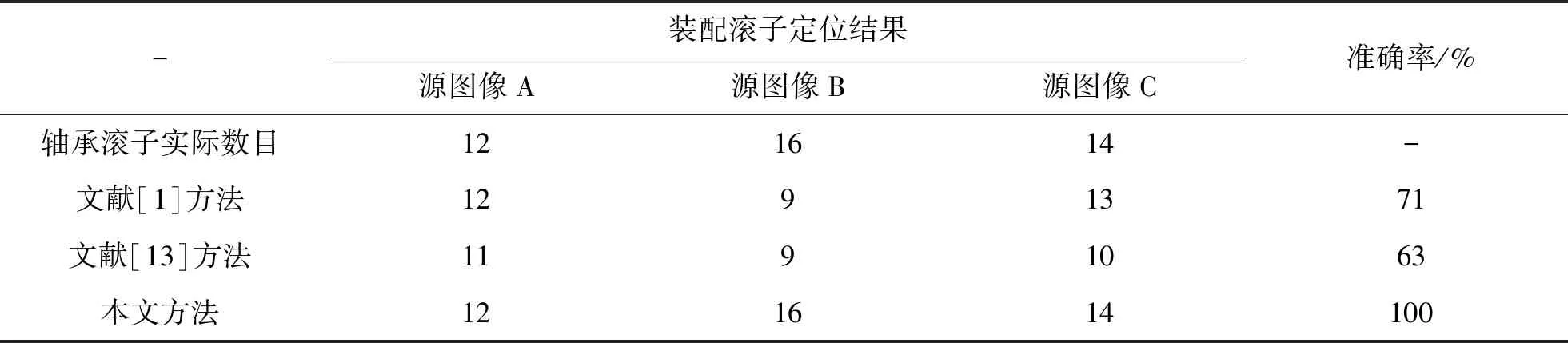
表2 轴承滚子检测结果对比效果实验数据
3 结论
在轴承实际的生产过程中,人工进行轴承滚子检测效率较低,为了提高不同检测环境下轴承滚子自动检测的效率以及对缺失滚子进行再次装配,提出了融合Hough圆检测和边缘模板匹配的轴承滚子检测方法,实现了对不同环境下轴承工件中已装配滚子的准确、稳定检测和漏装滚子的精确定位。如何进一步提高边缘模板匹配算法的鲁棒性使其具备旋转不变性和尺度不变性,以满足复杂场景下的实际检测要求,将是进一步重点研究工作。
