基于旋量理论的三指灵巧手工作空间研究
2020-10-13裴九芳许德章
裴九芳,许德章,王 海
(安徽工程大学 机械与汽车工程学院,安徽 芜湖 241000)
多指灵巧手又称机器人灵巧手或多关节机械手,是一种并联加串联形式的多机器人系统,一般由手掌和3~5个手指组成,每个手指有3~5个关节,每个手指都可以看作是一个具有多自由度的串联机器人。其主要应用如代替人手完成复杂的、灵巧的或危险的任务,在极限环境或有害环境下替代人类执行特定任务,在太空航天器的舱外、核电站、化工厂等危险、恶劣的工作环境中从事探测、取样、装配、修理作业,以及战场探雷和排雷等危险工作。
为了实现灵巧手的抓取规划和精细操作功能,首先需要对灵巧手进行正运动学分析。正运动学是已知各个关节转角,计算手指末端对应的位姿。目前,多数学者对机器人运动学普遍采用D-H(denavit-hartenber)参数法[1-2],其建模时需要在每个关节都建立局部坐标系,每个坐标系都需要确定4个参数(θidiαiai), 然而其缺点在于效率低、几何意义不明确;当机器人构型改变时,还需要重新建立新的坐标系[3]。与D-H方法相比,基于旋量理论的运动旋量指数积形式只需建立基坐标系和末端的工具坐标系,具有明显的几何意义和简洁性,简化了对机器人构型的分析,为后续雅可比矩阵分析、动力学研究等打下良好的基础[4-9]。
工作空间是衡量机器人灵巧手抓取范围的重要指标。机器人灵巧手的工作空间是指手指指尖所能达到的所有三维空间点的集合,即正运动学解的集合。现有学者对其他手指的单指进行了空间求解[10]。然而,灵巧手在抓取时,主要是利用两指或三指对目标进行操作,手指的合成空间才能更清晰地反映抓取空间和抓取范围,因此需要更进一步对多个手指的合成空间进行分析。另外,从合成空间还能够获知各个手指抓取的独立空间、互补空间和重叠(灵巧)空间,以便对灵巧手各手指的几何尺寸和布置进行优化。研究也对抓取空间点的概率分布进行了分析,以便对抓取目标的几何尺寸进行筛选,对抓取效果进行预判,从而更稳定地抓取目标。
英国Shadow公司研制的Shadow多指灵巧手是多指手产品化的一个代表,可以模仿人手灵巧地进行抓持操作,而且手指上配备有触觉传感器、位置传感器、温度、电流传感装置等,可作为后续的灵巧手的运动学、动力学及控制性能的研究平台,对揭示灵巧手的一些共性问题有积极的意义。
研究以Shadow三指灵巧手(拇指、食指、无名指)为研究对象,利用旋量理论对其各手指进行正运动学分析,然后对各手指的工作空间和合成工作空间进行研究,最后对抓取空间点在各方向的概率分布进行分析,为机器人灵巧手的后续抓取规划和操作打下理论基础。
1 旋量理论基础
1.1 旋转理论对刚体运动的描述
如果一刚体以单位速度绕ω∈R3轴作匀速转动,转动角度为θ,则刚体的运动变换可用矩阵指数形式表示:
(1)

(2)
1.2 刚体运动的指数坐标和运动旋量
当一刚体既绕轴线ω∈R3转动,又沿平行于ω轴方向直线移动为v,则刚体的变换矩阵指数形式表示为:
(3)


图1 刚体的旋量运动
1.3 机器人运动学的旋量表示

(4)
则,n自由度任意开链机器人的运动学的正解映射,可将各关节的运动加以组合,即得运动学正解映射gst:se(3)→SE(3)如下:
(5)
式中,gst(0)为机器人末端相对于基坐标系的初始位姿;gst(θ)表示机器人末端的最终位姿;se(3)和SE(3)分别表示一个李代数和李群,代表旋量的集合和刚体变换的集合。
2 Shadow机器人灵巧手正运动学方程
Shadow三指灵巧手包括拇指、食指和无名指,拇指共5个自由度,分别为下指节的侧摆和屈曲,中指节的侧摆和屈曲,以及上指节的屈曲运动,侧摆轴与屈曲轴垂直,且与手掌相连;食指和无名指结构相同,分别为下指节的侧摆和屈曲,以及中指节和上指节的屈曲运动,其中,中指节和上指节相互耦合,耦合系数为1。三指Shadow手的结构简图如图2所示。

图2 三指Shadow手的结构简图
2.1 食指(无名指)旋量正运动学分析
食指运动模型简图如图3所示。坐标系及运动旋量,正运动学分析如下:
(1)构造转动关节的运动旋量ω和末端相对于基坐标系的初始位姿gst(0)。
ω1=(0 0 1)T;ω2=(0 1 0)T;ω3=(0 1 0)T;ω4=(0 1 0)T。
(2)取轴上的点q。
q1=(0 0 0)T;q2=(a10 0)T;q3=(a1+a20 0)T;q4=(a1+a2+a30 0)T。


(5)求正运动学结果。
(6)
式中,si=sinθi;ci=cosθi;sij=sin(θi+θj);sijk=sin(θi+θj+θk)(研究中后续沿用此表达)。
2.2 拇指旋量正运动学分析
拇指的自由度比食指和无名指多一个,为5个自由度,其运动模型简图、坐标系及运动旋量表示如图4所示。其正运动学分析如下:构造转动关节的运动旋量ω和末端相对于基坐标系的初始位姿gst(0):
ω1=(0 0 1)T;ω2=(0 1 0)T;ω3=(0 0 1)T;ω4=(0 1 0)T;ω5=(0 1 0)T;
q1=(0 0 0)T;q2=(a10 0)T;q3=(a1+a20 0)T;q4=(a1+a2+a30 0)T;
q5=(a1+a2+a3+a40 0)T;
ξ1=[0 0 0 0 0 1]T;ξ2=[0 0a10 1 0]T;
ξ3=[0 -a20 0 0 1]T;ξ4=[0 0a20 1 0]T;
ξ5=[0 0a2+a40 1 0]T;
(7)
式中,r11=s5(s4(s1s3-c1c2c3)-c1c4s2)-c5(c4(s1s3-c1c2c3)+c1s2s4);
r12=c5(s4(s1s3-c1c2c3)-c1c4s2)+s5(c4(s1s3-c1c2c3)+c1s2s4);
r13=-c3s1-c1c2s3;
r21=c5(c4(c1s3+s1c2c3)-s1s2s4)-s5(s4(c1s3+s1c2c3)-c4s1s2);
r22=-c5(s4(c1s3+s1c2c3)+s1s2c4)-s5(c4(c1s3+s1c2c3)-s1s2s4);
r23=c1c3-c2s1s3;
r31=-c5(c2s4+c3c4s2)-s5(c2c4-c3s2s4);
r32=s5(c2s4+c3c4s2)-c5(c2c4-c3s2s4);
r33=s2s3;
px=a2c1c2-a4c1s2s4-a4c1s1s3+a4c1c2c3c4-a5c1c4s2s5-a5c1c5s2s4-a5c4c5s1s3+a5s1s3s4s5-a5c1c2c3s4s5+a5c1c2c3c3c5;
py=a2s1c2+a4c1c4s3-a4s1s2s4+a4s1c2c3c4+a5c1c4c5s3-a5c4s1s2s3-a5c5s1s2s4-a5c1s3s4s5+a5s1c2c3c4c5-a5s1c2c3s4s5;
pz=a5c3s2s4s5-a4c2s4-a4c3c4s2-a5c2c4s5-a5c2c5s4-a5c3c4c5s2-a2s2。

图3 食指FF(无名指RF)的结构模型 图4 拇指TH的结构模型
3 Shadow灵巧手工作空间分析
灵巧手的工作空间是衡量机构性能的重要指标,在机构设计控制和操作等方面具有重要意义。参照人手的解剖结构,人手结构和运动范围因人而异,大致有一个通用的范围[11],Shadow灵巧手手指结构参数和关节范围如表1所示。
根据正运动学方程的分析,运用MATLAB软件进行数值计算,根据表1所示各个关节范围和各个连杆几何尺寸,计算手指指端工作空间边界点,从而构成的空间范围如图5、图6、图7所示。

表1 Shadow手指结构参数和关节范围
3.1 单个手指的工作空间
由图5、图6可以看出,食指和无名指的工作空间结构相同,仅空间投影在Y方向的数值范围不同,食指和无名指的工作空间X方向的空间范围处于[-32.83,32.83]之间;食指和无名指的工作空间Z方向的空间范围处于[44,190.98]之间,其Z方向是由大变小再变大的过程;食指Y方向的空间范围在[-34,-130]之间;无名指Y方向的空间范围在[-86,10]之间。

图5 食指工作空间 图6 无名指工作空间
由图7可以看出,拇指的工作空间最大,与实际相符。拇指在抓取中处于主导地位,所达范围也最大。拇指的工作空间X方向的空间范围为[-85.9,85.9]之间,Y方向的空间范围为[-131.5,-34.96]之间,Z方向的空间范围为[-44.4,115.14]之间。
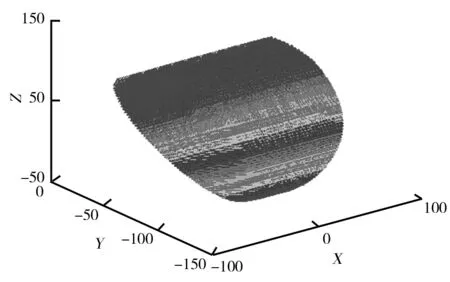
图7 拇指工作空间
3.2 3个手指的合成空间
灵巧手在抓取目标时,是依靠两指或三指共同协作对目标进行操作,所以研究3个手指的合成空间能更清晰地反映抓取空间和抓取范围。从灵巧手的合成工作空间可以获知各个手指的独立工作空间,各手指工作空间的重叠区域形成的协调工作空间是表征灵巧手运动灵活性的主要指标。研究合成空间便于对抓取目标物进行筛选,也能对灵巧手的几何尺寸和布置进行优化设计。
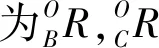

图8 灵巧手的坐标系布局
α=45°。对坐标系统一后,所得合成空间如图9、图10所示。

图9 3个手指的合成空间
图10 合成空间的平面投影
对合成空间取多截面分析发现,工作空间没有空洞,工作形状紧凑,与实际手指的工作空间相符。其中,XOY平面投影中,大拇指和食指的重叠灵巧空间较大,这也印证了利用大拇指和食指抓持和操作物体最频繁,运动也最灵巧;XOZ平面投影中,食指和无名指的投影完全相同,形成了重叠,大拇指和两指之间的重叠区域不大,重叠区域主要位于大拇指的最末端关节和食指或无名指的第二关节之间;YOZ平面投影中,大拇指和两个手指之间的重叠灵巧空间较大,并且3个手指的空间具有较好的互补性,从重叠空间的分布看,大拇指和食指之间,大拇指和无名指之间都有一定的重叠,分布的面积也相近,说明大拇指的位置很恰当,能够和其他各指进行配合完成精度操作和强力抓取操作。
仿真的空间结果与实际手指操作空间相符,从而也验证了利用旋量理论进行运动学分析,进而进行工作空间分析的正确性。
3.3 空间分布概率
从工作空间可以看出,有些空间点密集,而有些较为稀疏,空间点密集说明灵巧手操作更频繁更灵活地到达这些位置,而稀疏的空间点说明灵巧手操作较少到达此位置,这也间接说明,如果抓取物体位于空间点密集的区域,将更灵巧、更稳定地被抓持和操作。为了进一步从操作频繁角度来分析抓取空间,进而对抓取目标的几何尺寸进行筛选,对抓取效果进行预判,对抓取空间点的概率分布进行分析。
对合成空间的点集进行分析,分解点集的数量与空间位置之间的关系,得到3个手指投影在X、Y、Z3个方向的点集概率分布,如图11所示。从图11a看出,大拇指的工作空间点集在X方向的概率分布位于±85.9之间,分布范围最广,点集较为分散;食指和无名指的工作空间点集在X方向的概率分布完全重合,位于±32.8之间,分布范围小,点集较为集中。从图11b看出,3个手指的工作空间点集在Y方向的概率分布相似,分布范围较宽,其中大拇指在Y方向的概率分布位于区间[-131.5,-35],而食指和无名指在Y方向的概率分布分别位于区间[-130,-34]和[-86,10]。从图11c看出,拇指的工作空间点集在Z方向的概率分布位于区间[-44.4,115.1],而食指和无名指在Z方向的概率分布完全重合,位于区间[44,191]内,3个手指的分布范围都较广。从图11可以推测出,抓取目标的尺寸最大不能大于各方向的概率分布范围,而最佳尺寸是位于较高概率分布的区域,可以根据实际情况来选择一定的概率分布区域进行稳定抓持操作。
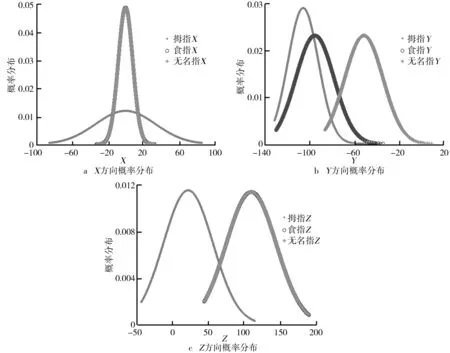
图11 手指空间点集方向概率分布
4 结论
应用旋量理论推导了Shadow三指灵巧手(拇指、食指、无名指)各指的正运动学方程,几何意义明确;在此基础上,对各手指的工作空间进行单独分析,给出了各手指的工作空间范围,然后对各手指进行坐标系统一,给出了3个手指的合成工作空间,从合成空间获知了各个手指抓取的独立空间、互补空间和重叠(灵巧)空间,便于后续对灵巧手各手指的几何尺寸和布置进行优化;最后对抓取空间点集在各方向的概率分布进行分析,以便对抓取目标的几何尺寸进行筛选,对抓取效果进行预判,更稳定地抓取目标物体。研究将为机器人灵巧手的后续抓取规划和操作打下理论基础。
