家庭助老服务机器人的设计与分析
2020-10-12张峄左巍李卫国
张峄 左巍 李卫国
摘 要:传统助老机器人抓取物品时稳定性差、运动轨迹不精确、机器人整体变形量较大。针对上述问题,设计了一款能够辅助老年人的智能抓取物品的家庭式助老机器人。提出了应用Matlab软件对助老服务机器人悬臂结构进行逆运动学仿真分析的方法。构建了其底盘部分、悬臂机构、抓取机构的三维模型。计算求得底盘部分各全向轮的速度表达式和机器人悬臂的D-H位姿运动方程组,仿真获得了实体机器人难以得到的变形数据。通过实验证明,机器人可以实现精确运动与机器人布局的合理与稳定性。
关键词:助老机器人;结构设计;有限元法;运动学
中图分类号:TB 文献标识码:A doi:10.19311/j.cnki.1672-3198.2020.31.073
0 引言
随着自动化、智能化技术的不断进步,使得机器人在国内外研究领域的得到普遍重视,也得以进一步的推广和发展。同时,由于世界人口老龄化程度的进一步加深,作为机器人其中之一的家庭式助老机器人的刚性需求越来越明显。
据统计,我国60岁以上老人已达2.41亿人,这表明我国已经步入老龄化社会。养老问题已成为当前社会的一大压力。且鉴于我国基本国情,由于计划生育政策的实施使得当前老人多数只有一个子女。子女不能经常陪在老人身边,使得多数老人在日常生活行动上只能靠自己。然而,由于年龄大老年人腿脚不便,有的甚至卧病在床而不能移动。故而,非常有必要设计一种家庭式助老机器人,以代替老年人行走,帮助其从事日常抓取、搬运等作业。这样可大幅度地避免了老年人在日常生活中由于移动需求而摔倒现象的发生。所以,为了关爱老年人和残障人士,提高他们的生活质量,研发一种高效、可靠的家庭式助老机器人,服务老年人和下肢残障人士的日常行动,具有十分重要的意义。
1 家庭助老机器人的结构组成及原理
助老服务机器人作为老人生活的重要辅助工具,主要是通过为一些行动不便或者独居的老年提供简单且必要的生活服务。故而,在功能方面要求其提供必要简单的生活服务。助老机器人须具备自主定位、家庭环境构建地图、自主避障、路径规划等基本功能。本文所设计的助老机器人,正是一种应用于对老人实行实时帮助,在工程人员所设定的预定指令下,为老人提供满足其生活需求的服务型机器人。
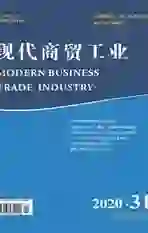
本文主要研究家庭助老机器人的机构部分,包括助老机器人的底盘部分、悬臂机构、抓取机构。如图1所示,为所设计的家庭助老机器人整机结构图。
家庭助老式机器人结构设计合理,三角底盘的主骨架采用铝合金角钢焊接而成,既不影响机架强度,又减轻了其重量,降低了能耗。在助老机器人底盘上将三个全向轮进行合理均匀布局,确保整个机器人在执行多种运动方式时的平稳性和可靠性。每個万向轮都由独自的步进电机驱动,因此,可通过对每个万向轮上的驱动电机做运动控制,各电机的联动可实现整个助老机器人在不改变运动姿势的前提下实现多种运动形式,这样就实现了所要求的全向移动。
1.1 助老机器底盘设计
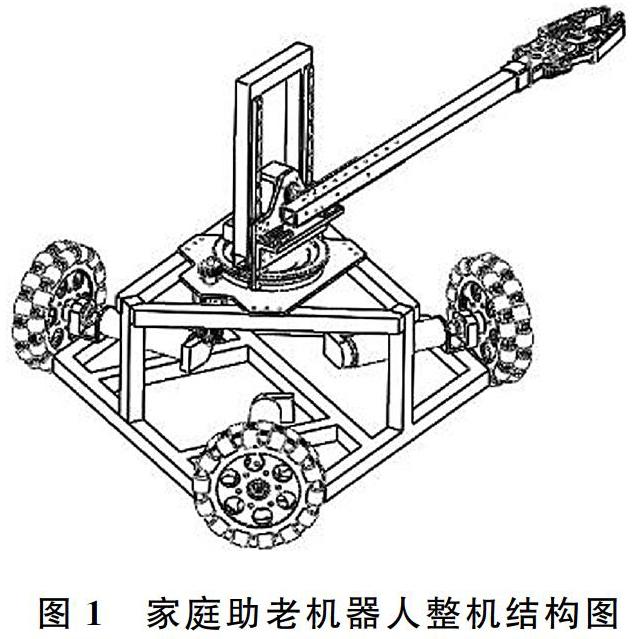
家庭助老式机器人底盘采用三角底盘,结构简单、运动灵活。三个万向轮分别固定于三角底盘的一端。如图2所示,为所设计的家庭助老机器人的底盘部分。
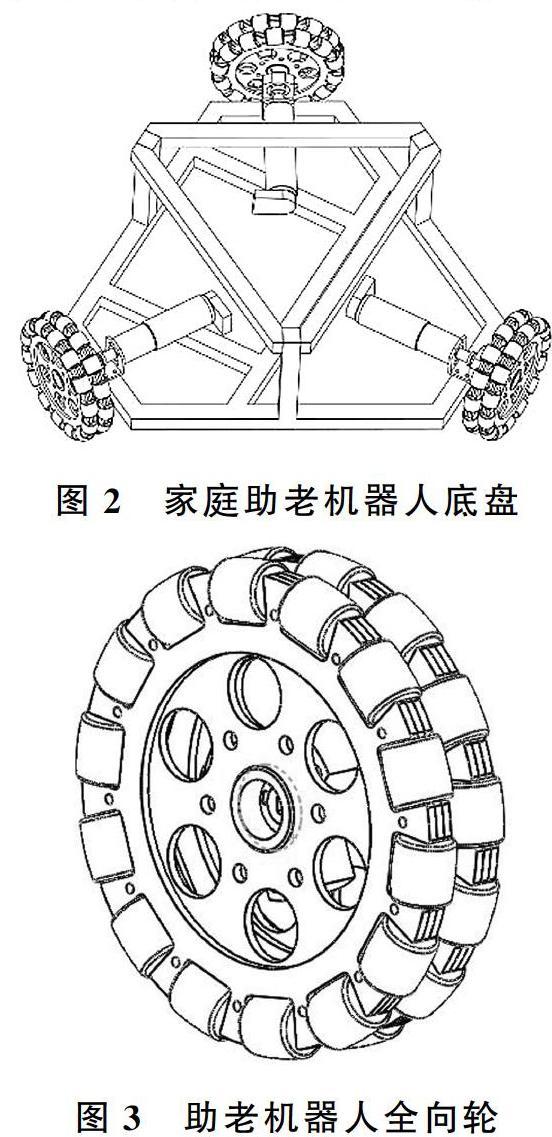
在机器人车轮的设计上,常见的有球形轮、麦克纳姆轮和万向轮。球形轮由于其控制难度大,故而在业内很少采用。麦克纳姆轮的结构设计和运动控制相对而言都较简单,故而在有全向移动要求的机器人中使用较为广泛。但是,由于其与地面接触时接触点不连贯,而且只有一个可控运动自由度,导致在运行行进的过程中常出现打滑和噪声,造成运动效率低下,使用率也越来越低。而全向轮正好克服了上述两种产品的缺点,采用该全向轮的服务机器人可以很好地完成多种形式的运动,并且无噪声和侧滑现象的发生。如图3所示,为所设计的家庭助老机器人所采用的全向轮。
本文所设计的家庭式助老机器人采用的全向轮,其运动灵活、控制简单可靠,可以胜任轮式机器人的多种移动任务。在该助老机器人的控制程序中,封装有多个相关的运动状态控制函数,可对该助老机器人实行全部的置态控制。全向轮采用步进电机驱动,步进电机的可控角位移方式使的在机器人控制过程中不仅可以控制其运行速度,还可精准地控制机器人全向轮的运行距离。通过上位机根据对地形的实施扫描和分析所作出的位姿规划,对三个轮的驱动系统分别实施控制,就可以实现机器人精确运动的效果。机器人的整个控制系统通过一个通信控制线程,就可以实现与机器人其他平台的无缝连接,数据移植性极高。
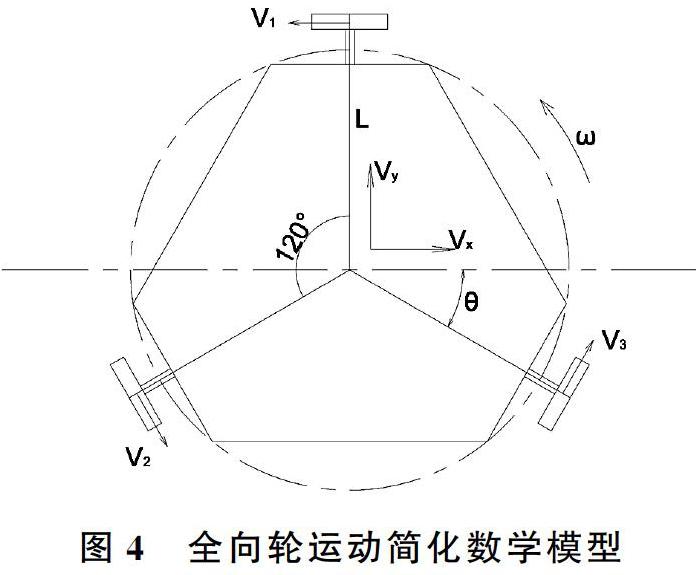
本文采用经典的三轮全向轮布置结构,机器人的三个全向轮的轴线成 120°角分布,全向轮中心相交于一个圆的圆心上,全向轮的旋转方向与圆相切。简化后的运动学数学模型如图4所示。
图中,V1、V2、V3分别表示为助老机器人的三个全向轮的转速, Vx、Vy分别表示为助老机器人的底盘相对于世界坐标系的宏观移动速度,ω表示为助老机器人底盘的自转角速度,L 表示为轮子中心到圆心的垂直投影距离,θ表示为轮轴与 x 轴的夹角。机器人的三个全向轮在圆周方向均匀分布,即各车轮安装角度相隔120°。则机器人的各轮速度转换矩阵表示为:
解算后可得各车轮的转速 V1、V2、V3 的表达式:
机器人的各全向轮由步距角为1.8°的42型步进电机驱动其转动,可实现更精确的全向轮可控角位移,即每个脉冲可以控制电机轴转动 1.8°,200 个脉冲使电机轴完成圆周运动。通过对脉冲数的统计和轮子外径的技术,即可求得单个轮子的位移。从而通过对上位机运动的合成计算即可求得整个助老机器人底盘的移动速度,以及其移动方向。
1.2 助老机器悬臂结构设计
按照手臂的坐标形式划分,常见的机械手主要有以下四种:直角坐标式、圆柱坐标式、球坐标式和关节式。其中,直角坐标式机械手的运动空间通过相互垂直的直线运动来实现。但是,直角坐标机械手的运动空间相对机械手的结构尺寸来讲较小,且对于本文所设计的助老机器人而言极不灵活。想要了实现一定的运动空间,其结构尺寸要比其他类型的机械手大得多。圆柱坐标机械手由一个回转运动及两个直线运动来实现其预定运动轨迹。这种机械手构造相对简单,精度适中,其工作空间是一个圆柱状的空间。球坐标机械手的空间运动由两个回转运动和一个直线运动实现。这种机械手结构简单、成本较低,但精度不很高,不适合本文所设计的助老机器人。关节型机械手的空间运动由三个回转运动实现。其动作灵活、结构紧凑,占地面积小。相对机械手本体尺寸,其工作空间比较大。本文所设计的家庭式助老机器人采用圆柱坐标和直线坐标相结合的形式,不仅精度高、控制简单,而且运动灵活。机器人悬臂与底盘的连接点采用铆钉固定的方式,机械臂的末端连接机器人抓取机构。如图5所示,为所设计的家庭式助老机器人的手臂机构。
悬臂下端由电机驱动一对齿轮轮组转到,使悬臂结构整体围绕从动齿轮轴转动。悬臂结构上横梁的上下、前后移动分别由一对齿轮齿条机构驱动。
根据上述家庭式助老机器人的结构组成及其工作原理可知,机器人的悬臂结构有4个自由度,包括两个移动副和两个旋转副。通过对家庭式助老机器人进行空间位姿运动学的数学建模分析,建立起悬臂结构末端处的抓取机构与其他各关节之间的关系,利用悬臂杆件之间关节变换关系推导出悬臂末端抓取机构的位姿变换矩阵。所以,在机器人上的每一个部件规定了参考坐标系和关节变化量,悬臂上的每两个关节之间即可产生一个自由度。实验分析由悬臂结构上各运动部件之间的相对变化关系,推导出了抓取机构的最后位姿形态。
1.3 老机器抓取结构设计
结合上述各类机械手的优缺点分析,本文所设计的抓取机构采用圆柱和关节相结合的方式。如图6所示,为所设计的家庭助老机器人的抓取机构。
抓取机构由一对对称布置的齿轮组,驱动一对平行四边形机构以实现抓取作业,齿轮组中有一个为主动轮。由平行四边形的对边平行的性质可知,抓取机构的外侧杆永远平行于抓取机构的主轴轴线。外侧杆的伸长部分实施对物体的抓取作业。
2 仿真分析
所设计家庭式助老机器人的底盘不仅承受来自被抓取物体的重量,而且有机器人自身的重量。由于其三角底盘的主骨架采用铝合金角钢焊接而成,故而需要对其结构的强度进行仿真和分析。机器人悬臂有四个自由度,需要对各关节的运动进行模拟仿真。
2.1 助老机器人底盘支架有限元仿真
经对悬臂结構的架体、电机、齿轮齿条,和抓取机构的统计计算,总重59.2kg。所设计机器人预抓取重量为40kg。将抓取重量和悬臂自重值施加于机器人底盘支架上,得到等效应力云图(图 7)、 等效应变云图(图 8) 和变形云图(图 9)。由变形云图可知,该底盘支架最大变形发生在支架上端三角的两根横梁上,最大变形量为2.12mm。由等效应力云图和等效应变云图可知,最大应力和最大应变都发生在上方三角形和低端六边形的相切处。考虑到家庭式助老机器人的工作用途,为了进一步增强其安全可靠性,在三角形梁的下端增加立柱支撑。
2.2 助老机器人悬臂空间位姿的运动学模型仿真
由上述内容所确立的助老机器人悬臂结构的D-H坐标系和参数,对其悬臂结构在Matlab软件建进行数学建模后,根据家庭式助老机器人悬臂末端抓取机构预定的位姿和轨迹参数方程,利用Matlab/Robotics Toolbox软件对机器人悬臂进行逆运动学分析。绘制的各关节旋转、位移曲线如图10所示。
3 结论
本文设计了一款轻便智能、运动灵活、简洁方便、安全性高的家庭式助老机器人。首先建立了助老机器人的三维模型,包括机器人底盘部分、机器人手臂机构、机器人抓取机构。并求得底盘部分各全向轮的速度表达式和机器人悬臂的D-H位姿运动方程组,对机器人悬臂进行建模后,利用Matlab/Robotics Toolbox软件对该机器人悬臂进行逆运动学分析。证明了所设计机构的可行性与合理性。并对机器人底盘受力变形大的区域进行了结构优化。
参考文献
[1]孟正大.助老助残服务机器人家庭环境下标签的识别[J]计算机与数字工程,2008,(11).
[2]王曙光.移动机器人原理与设计[M].北京:人民邮电出版社,2013:32-38.
[3]吴志志.三轮全向移动机器人的同时定位与地图创建 [D].成都:西南科技大学,2018.
[4]周锦华,武建新,安建飞,等.悬臂式低压铸造机的设计及运动学分析[J].铸造技术,2017.
[5]王慰军,杨桂林,张驰,等.一种基于驱动万向轮的全向移动平台设计[J].机械传动,2019.
[6]刘勇,吕艳辉,白云裳,等.三轮全向轮机器人底盘控制与分析[J].中国新通信,2018.