基于惯性测量信息的跟踪脱靶量延时补偿技术
2020-10-09祝涛冷悦
祝涛 冷悦

【摘 要】目前,图像跟踪系统对惯性运动信息应用不充分,针对近距离移动目标、大机动环境等特殊状态的跟踪模型不完善,未能充分挖掘跟踪系统潜力。论文以光电探测、星体跟踪等经典图像跟踪系统为研究对象,将跟踪稳定过程从扰动源角度分解为载体运动隔离与目标移动跟踪,并从跟踪手段角度分解为物理伺服跟踪与图像数字跟踪。建立了一套与上述扰动源对应的工程实用数学模型,充分发挥了惯性信息对目标跟踪的辅助作用。
【Abstract】Nowadays, the inertial motion information was not fully used in image tracking system. The tracking models for special states such as close-range moving targets and large maneuvering environment are not perfect and the potential of tracking system cannot be fully exploited. Taking the classic image tracking system such as photoelectric detection and star tracking as the research object, the tracking stability process is decomposed from the disturbance source to the carrier motion isolation and target motion tracking, and from the tracking means to the physical servo tracking and image digital tracking. A set of practical engineering mathematical model corresponding to the disturbance source is established, which gives full play to the auxiliary role of inertial information in target tracking.
【關键词】图像跟踪;惯性信息;扰动源
【Keywords】image tracking; inertial information; disturbance source
【中图分类号】TP391.4 【文献标志码】A 【文章编号】1673-1069(2020)07-0180-02
1 引言
传统跟踪控制方法利用系统自带的测角微分信息或控制用陀螺信息实现速度环稳定[1],并通过探测器采集、检测待跟踪目标,将脱靶量信息引入伺服位置环,实现目标持续跟踪。跟踪效果依赖图像的识别能力与更新频率,抗扰动能力较差。但在岸基或大型舰船等静止、低动态平台影响不明显[2]。对于轮式车、飞行器以及高速水面航行器等平台,跟踪系统需要在高动态条件下完成目标图像稳定及检测[3]。该任务背景下,运载体剧烈角运动以及目标近距离高速位移,会导致目标在图像中难以清晰成像,降低目标识别率,甚至造成目标丢失[4]。针对上述问题,论文提出了基于惯性运动信息辅助的目标跟踪控制策略。以探测成像过程中的跟踪扰动误差源的分类分析为出发点,围绕惯性运动信息如何辅助伺服跟踪这一问题,开展研究工作。最终实现同等伺服硬件条件下目标跟踪能力的有效提升,从信息跨界融合的角度深度挖掘了伺服跟踪性能潜力。
2 跟踪扰动源分类分析
图像稳定跟踪的核心功能是通过伺服控制将目标稳定在图像指定区域内,缩小目标脱离靶面坐标系中心的偏移量(以下简称脱靶量)[5]。在控制过程中,目标脱靶量主要受到两类扰动误差源的影响,上述两类扰动均会导致观测目标在载体坐标系下产生高度和方位角变化,进而导致目标偏离靶面坐标系中心[6]。但本质上两类干扰的形成机制、特点完全不同。
第一类,由设备自身角运动造成,因此,扰动频率受载体影响分布较宽,但可以被设备自带的惯性敏感器件完整的敏感到。其影响主要在使用小视场观察远距离目标时较大,会导致图像严重晃动。第二类,由设备与目标在垂直光轴方向的相对线运动造成。以低频扰动形式存在,但只能通过较低频率的图像信息获取,在跟踪近距离目标时影响较大。
3 物理伺服跟踪策略分析
可获取高频惯性导航信息条件下的控制策略:伺服跟踪控制策略设计核心是充分利用惯性信息,对伺服系统位置环给定量进行优化,减小延时、降低噪声、提高频率,从而实现系统控制稳定精度的提升。算法流程如下:
第一,获取目标矢量在地理坐标系投影。脱靶量更新后,根据测角信息、惯导姿态信息换算到地理坐标系。公式如下:
第二,在地理坐标系进行目标预测。脱靶量会受到运载体自身角运动的影响,由于运载体角运动包含较多高频量,因此,直接对载体坐标系目标矢量Rb、靶面坐标系目标矢量Rs进行预测的精度很差。对载体运动解耦后,可得到的目标在地理系下的矢量Rn,是一个低频量,可以进行插值预测,进而提高目标脱靶量的更新频率,优化跟踪系统性能。
目标在地理坐标系的位置矢量可以描述为:
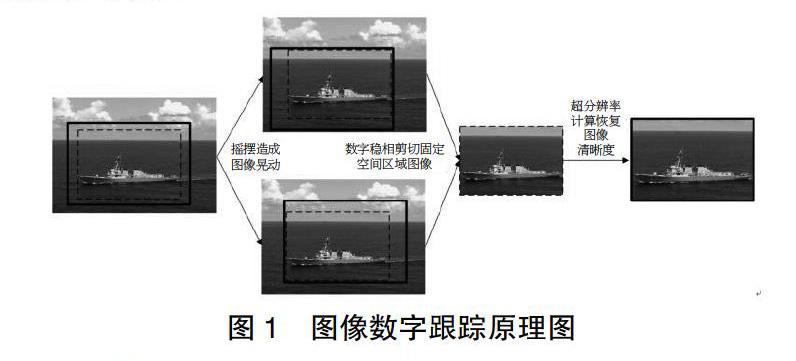
4 图像数字跟踪策略分析
由于其本质是采用多帧图像进行叠加,一是无法解决一帧图像积分时间内,靶面晃动导致的图像模糊、拖尾问题;二是在光电系统中,由于目标是移动的,不能长时间积分叠加;三是在光电系统中,该方法可用于提高对外输出图像稳定性,目标识别过程中应采用原始图像或采用像素合并,减少图像处理延时、提高帧频率。
5 试验情况
轮式车跑车状态为高频率、强振动环境,在该运动条件下目标跟蹤难度较大。采用天文导航测星脱靶量分布统计结果对比跟踪效果如下:
试验条件:①车速:60~80km/h。②观测视场:22′×17′。③像素大小:4.1″。分别采用两套同类系统进行试验,每次试验持续2h,平均抽取1000帧星图所对应脱靶量进行统计。
试验结果:
6 结语
论文分析了目标跟踪控制系统中两类干扰源的特点,提出了利用高频率、高精度、微小延时惯性导航信息对平台运动进行隔离、对目标轨迹进行预测的工程应用模型。介绍了在没有完整惯性导航信息条件下,利用控制用陀螺信息进行瞄准线稳定、图像稳定的方法、特点与不足。最终,通过试验结果数据统计证明,利用惯性信息进行伺服控制优化,在相同的伺服硬件条件下,图像脱靶量稳定性可提高约1倍。
需要说明的是,在实际工程应用中,根据实际工况调整缩短积分时间;采用binning(像素合并)技术减小图像处理时间、采用折返镜技术减小转动惯量均是提高伺服跟踪效果的有效方法。
【参考文献】
【1】陈德毅,柳万胜,贺东,等.基于三轴光电跟踪系统的目标捕获方法[J].传感器与微系统,2019,38(1):12-19.
【2】付森.非合作空间目标光学捕获和快速锁定方法研究[D].哈尔滨:哈尔滨工业大学,2011.
【3】李焱.舰载光电设备跟踪掠海目标的控制[J].光学精密工程,2010,18(4):935-942.
【4】姬伟,李奇.陀螺稳定平台伺服系统非线性特性补偿控制[J].电气传动,2005,35(7):31-34.
【5】李文军,陈涛.光电跟踪系统噪声分析及其抑制[J].光学精密工程,2007,15(2):254-260.
【6】王合龙,朱培申.陀螺稳定平台框架伺服系统变结构控制器的设计和仿真[J].电光与控制,1998(2):24-29.
