履带式电驱动推土机直驶稳定性研究
2020-06-03盖江涛刘春生孙占春李耀恒马长军
袁 艺,盖江涛,刘春生,孙占春,李耀恒,马长军
(1.中国北方车辆研究所,北京 100072;2.北京理工大学 车辆传动重点实验室,北京 100072)
随着我国现代化建设步伐的加快,推土机作为铲土运输的重要机械,其销量迅速上升。在环保法规愈加严格和石油资源日益缺乏的今天,对工程机械的排放性和燃油经济性提出了更高要求。电驱动技术在汽车行业中的成功应用为耗能大、排放差的工程机械节能减排提供了一条有效可行的途径,卡特彼勒于2008年推出了第一款D7E电驱动推土机[1-3],但国内目前尚无电驱动推土机产品。
履带推土机在行驶中自动偏离前进方向的现象,称为跑偏。跑偏是推土机常见的故障现象。跑偏使推土机的作业质量及效率下降,操作者劳动强度变大,行动系的零部件磨损加剧。电驱动推土机一般采用双侧电机独立驱动方案,即一台电机驱动一侧主动轮,两侧电机之间无机械连接,更容易出现跑偏现象。因此,研究电驱动推土机直驶稳定性,解决其跑偏问题,可以为国内电驱动推土机产品开发提供技术支持。
目前关于电驱动推土机公开发表的文献研究主要集中在电驱动系统参数匹配及能量管理方面[2-7],而关于电驱动推土机纠偏及直驶稳定性方面的研究还未见,仅有学者对履带式全液压推土机的纠偏控制进行研究。文献[8]设计了全液压推土机实时纠偏系统,根据三维数字罗盘姿态传感器信号控制变量马达排量,进而马达转速实现纠偏,但是并没有设计详细控制算法,也无仿真验证;文献[9]以两侧马达零转速差为控制目标设计了基于PID调节的全液压履带推土机纠偏方法,但是两侧行动装置的差异也会造成推土机跑偏,因此即使实现了两侧马达转速相同也无法保证推土机直驶。液压马达并不能像电机一样实现精确控制,所以全液压推土机的纠偏控制效果还有待验证,而由于电机优良的控制特性,可以设计合适的直驶稳定性控制算法防止电驱动推土机跑偏。本文根据电驱动推土机直驶稳定性影响因素分析结果,设计了直驶稳定性控制算法,根据推土机横摆角速度调节两侧电机扭矩,并进行仿真验证,结果表明提出的直驶稳定性控制算法能够保证推土机的直驶稳定性。
1 电驱动履带式推土机建模
推土机电驱系统方案简图如图1所示,推土机电驱动系统基本工作原理为:发动机输出机械能通过一个发电机及其整流控制器转化成电能,传递到高压直流母线,电机控制器将能量传递给两侧驱动电机,再依靠综合控制器实现推土机的直驶及转向。
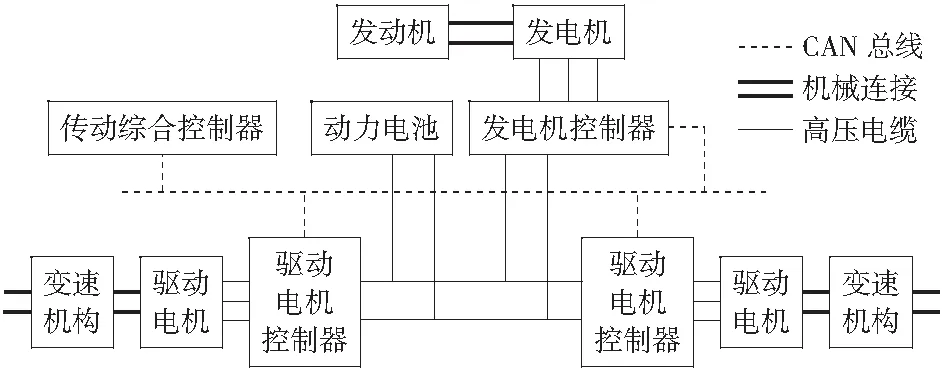
图1 电驱动系统方案简图Fig.1 Schematic diagram of electric drive system
1.1 发动机模型
发动机输出扭矩是发动机油门开度和发动机转速的函数,通过试验可以获得发动机的外特性曲线,并且考虑发动机响应延迟,可以得到发动机模型:
(1)
式中:Te为发动机输出转矩;ne为发动机转速;Te,max为当前发动机转速下可输出最大扭矩;τe为发动机响应时间;s为拉普拉斯算子。

图2 发动机外特性曲线Fig.2 External characteristic curve of engine
1.2 电机驱动系统模型
电机驱动系统包括驱动电机及控制器。建模中认为目标转矩在电机的输出范围内,则按目标转矩输出,否则按当前最大能力输出转矩,驱动电机输出特性曲线如图3所示。
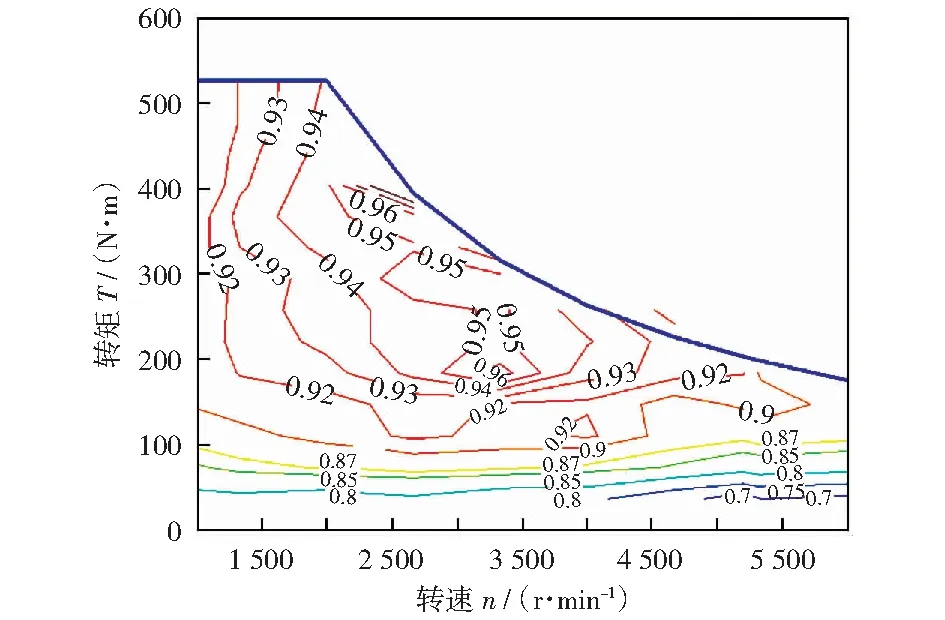
图3 驱动电机系统输出特性曲线Fig.3 Output characteristic curve of drive motor system
考虑到电机控制的响应时间,在目标转矩与实际转矩之间增加一阶环节[10]。因此,电机输出转矩与目标转矩关系为:
(2)

1.3 推土机动力学模型
忽略推土机的侧倾运动及俯仰运动,建立固定其几何中心的随动坐标系xoy,同时以大地坐标系XOY为绝对坐标系,如图4所示。

图4 推土机平面运动示意图Fig.4 Plane motion diagram of bulldozer
根据牛顿运动定律可以得到推土机动力学方程为[10-13]:
(3)
式中:m为推土机质量;v为推土机速度;IZ为推土机绕Z轴的旋转惯量;ω为推土机横摆角速度;F1和F2为两侧履带驱动力;Fr1和Fr2为两侧履带所受阻力;Ms为推土机转向阻力矩;Fx为推土机工作阻力;B为两侧履带中心距;L为履带接地长;r为主动轮半径;f为滚动阻力系数;β为坡度角;ρ为相对转向半径;μ为转向阻力系数;μmax为最大转向阻力系数;i为电机输出轴至主动轮的传动比;η为电机输出轴至履带的效率;φ为路面附着系数;Kb为单位面积的切削阻力;Bc为推土铲的宽度;h为推土铲的切削深度;γ为土壤的密度;km为考虑铲刀参数有关的侧漏等影响的土量换算系数;φ为土壤的自然坡度角;H为铲刀高度。
推土机在大地坐标系XOY下的坐标值可由下式求得:
(4)
式中:θ0为推土机起始位置与坐标原点O连线与X轴正方向的夹角;(X0,Y0)为推土机起始位置坐标。
1.4 电驱动履带式推土机仿真模型
利用Matlab/Simulink建立了电驱动履带式推土机仿真模型,如图5所示。其中,发电机建模方法与驱动电机建模方法相似,采用Simulink中的电池模型,变速机构采用SimDriveline中的模块搭建。

图5 电驱动履带式推土机仿真模型Fig.5 Simulation model of tracked electric bulldozer
2 电驱动履带式推土机直驶稳定性影响因素分析
由于两侧驱动电机特性不可能完全一致,两电机之间也无机械的刚性连接,而且推土机工作环境恶劣,两侧履带载荷不可能完全一致,所以推土机极容易出现跑偏。利用电驱动推土机仿真模型对电驱动推土机直驶稳定性影响因素进行分析,以下分析均将推土机从0 km/h加速至5 km/h后,匀速行驶,推土机行驶距离为15 m.
2.1 两侧电机转矩响应差异对跑偏量影响
将电机的控制特性的误差分为两类:1) 电机的稳态误差,主要是指电机的输出转矩误差,即要求的转矩输出与实际的输出转矩存在一定的比例关系;2) 电机的动态误差,主要是电机的响应时间。
如图6所示为两侧电机转矩响应稳态误差差异与推土机侧向位移关系曲线,两侧电机转矩响应误差的差异越大,侧向位移越大。

图6 两侧电机转矩响应稳态误差差异与推土机侧向位移关系曲线Fig.6 Relation curve between torque response steady error diff-erence of two motors and lateral displacement of bulldozer
如图7所示,两侧电机转矩动态响应时间常数的差异越大,侧向位移越大。

图7 两侧电机转矩动态响应时间常数差与推土机侧向位移关系曲线Fig.7 Relation curve between torque dynamic response time constant difference of two motors and lateral displacement of bulldozer
2.2 两侧履带差异对跑偏量影响
推土机两侧履带的张紧度必须保证一致,并且两侧履带应该平行才能保证推土机直驶,否则,即使两侧主动轮转速一致也无法保证推土机直线行驶。但是,随着零部件磨损、变形及调整间隙变大,仍会使两侧履带不一致而导致跑偏。如图8所示,两侧履带节距差异越大,侧向位移越大。
2.3 两侧负载差异对跑偏量影响
推土机行驶或作业时,两侧履带接触的土壤面积、松实度、干湿度不同,两侧履带所受阻力不一致,就会造成推土机跑偏。推土铲两侧铲刀臂不平行,推土作业时,一侧吃土多,一侧吃土少,也会造成推土机跑偏。如图9所示,两侧履带负载差异越大,侧向位移越大。
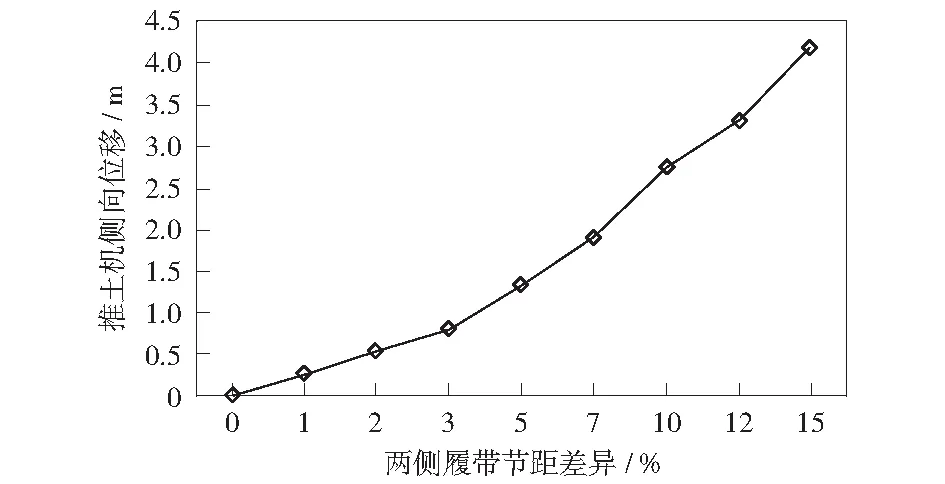
图8 两侧履带节距差异与推土机侧向位移关系曲线Fig.8 Relation curve between difference of track pitch on both sides and lateral displacement of bulldozer
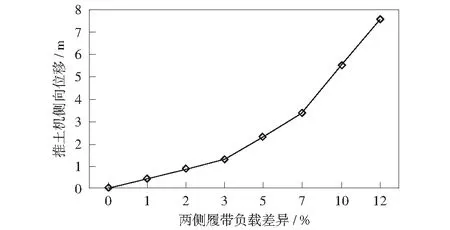
图9 两侧履带负载差异与推土机侧向位移关系曲线Fig.9 Relation curve between the load difference on both sides and lateral displacement of bulldozer
3 电驱动履带式推土机直驶稳定性控制策略设计
电机转矩稳态误差、电机动态响应误差、两侧履带差异以及推土机两侧负载差异都会对推土机直线行驶性能造成影响。因此,在控制上需要采取一定措施来保证推土机直线行驶的稳定性。
3.1 直驶稳定性控制反馈参数
直驶稳定性控制反馈参数主要有两种:一是以两侧电机转速差作为反馈参数,以两侧电机零转速差为控制目标来协调两侧电机的输出转矩。但是,通过之前的分析可知,两侧履带板节距及履带平行度等因素都会导致推土机跑偏,而仅采取两侧电机转速差作为控制参数就忽略了两侧履带的差异以及履带地面之间的运动状况,会造成较大的偏差。二是以推土机横摆角速度作为反馈参数,当推土机跑偏时就会产生横摆角速度,以横摆角速度为0作为控制目标协调两侧电机转矩,可以及时纠正车身姿态,使其沿直线行驶。可以采用惯性测量单元获取横摆角速度。综上所述,采用推土机横摆角速度作为反馈参数进行直驶稳定性控制。
3.2 基于模糊PID的直驶稳定性控制策略
推土机行驶过程中两侧履带载荷是时变的、随机的,显然参数固定的传统PID控制器是无法满足直驶稳定性控制要求的。由于其控制规则总结了工程技术人员的经验知识,模糊PID控制器可以对控制参数进行在线修改,使得被控对象表现出良好的性能。因此,采用模糊PID控制器进行电驱动推土机的直驶稳定性控制。
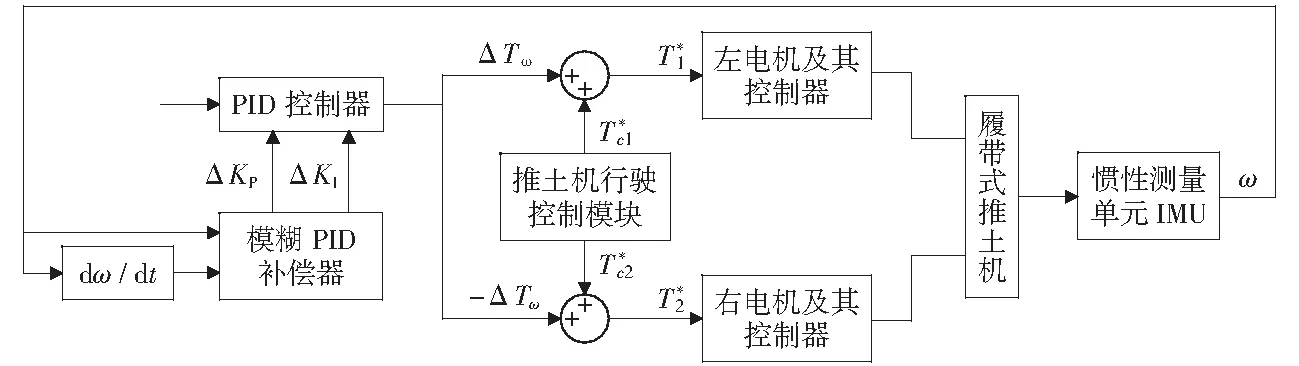
图10 直驶稳定性控制系统结构框图Fig.10 Structural block diagram of straight-line running stability control system
控制系统框图如图10所示。由惯性测量单元采集得到推土机横摆角速度,模糊PID补偿器根据横摆角速度及其变化率进行模糊推理得到PI参数的修正量,然后通过PID控制器得到转矩控制调节量:

(5)
然后对两侧电机同时进行调节,将左侧的输出转矩增大ΔTω,右侧的输出转矩减小ΔTω.
3.3 模糊PID补偿器设计
模糊PID补偿器的基本结构包括输入输出量化、模糊化、模糊规则、模糊推理、解模糊化等部分[14],如图11所示。
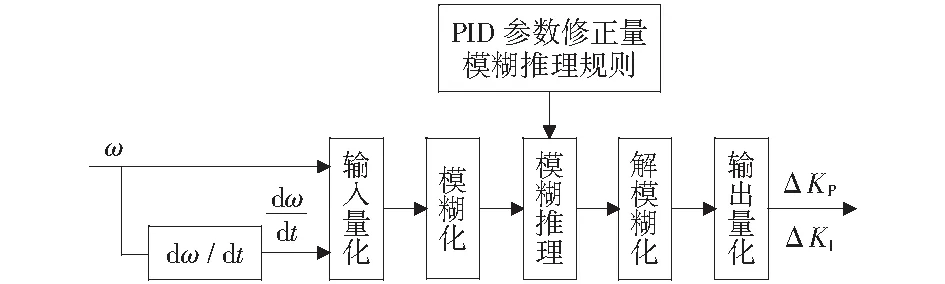
图11 模糊PID补偿器结构框图Fig.11 Structural block diagram of fuzzy PID compensator
模糊规则是模糊控制器的一个重要组成部分,由操作经验和专家知识总结得到的模糊规则均存放于此。当推土机跑偏时,应使横摆角速度ω快速趋于0;当推土机横摆角速度ω趋于0时,要尽量避免发生超调[15-16]。因此,对KP和KI要求有:
1) 在ω较大时,为提高响应速度,同时为了避免系统偏差出现超调,KP取大值,KI取0;在ω比较小时,为继续减小ω,并防止超调过大,产生振荡,KP值要减小,KI取小值;在ω很小时,为消除静差,使系统尽快稳定,KP值要继续减小,KI值不变或稍取大。
2) 当ω与dω/dt同号时,说明ω越来越大,因此,为尽快使ω为0,提高响应速度,KP应取最大值;当ω与dω/dt异号时,说明ω在减小,KP取值应随ω减小而逐渐减小。
给出比例系数修正量ΔKP、积分系数修正量ΔKI模糊推理规则,如表1、表2所示。
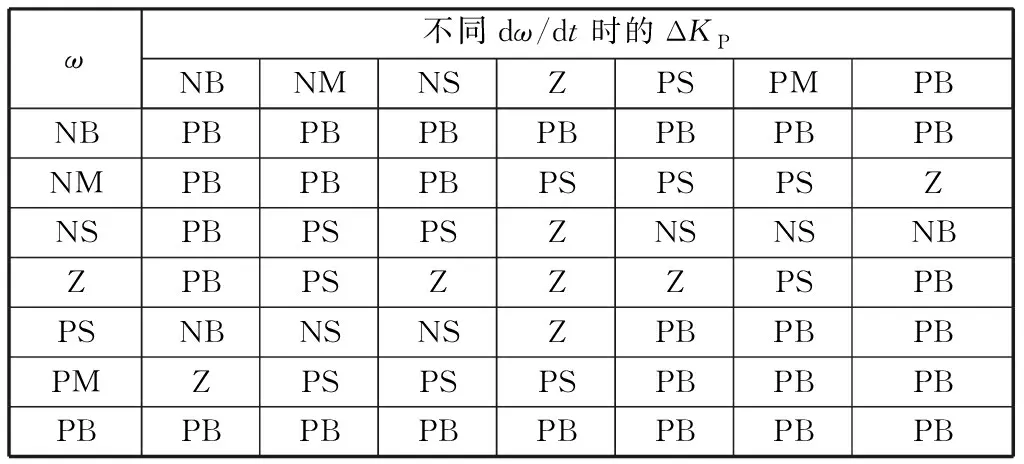
表1 比例系数修正量ΔKP模糊控制表Table 1 Fuzzy control table of proportional coefficient correction
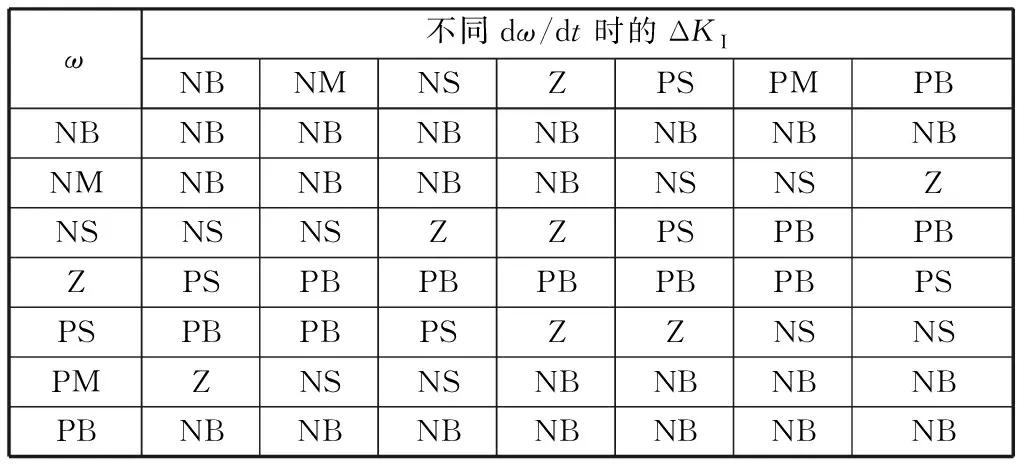
表2 积分系数修正量ΔKI模糊控制表Table 2 Fuzzy control table of integral coefficient correction
4 电驱动履带式推土机直驶稳定性仿真分析
针对两侧电机转矩响应存在差异、两侧履带板节距存在差异以及两侧负载存在差异时推土机的直驶工况进行了仿真,并对有、无直驶稳定性控制的情况进行了对比,验证控制效果。

图12 两侧电机转矩响应误差及两侧履带节距存在差异的直驶稳定性仿真结果Fig.12 Straight-line running stability simulation results considering differences in torque response error of two motors and track pitch on both sides
4.1 两侧电机转矩响应误差及两侧履带存在差异
两侧电机的转矩响应稳态误差差异设置为15%,两侧履带板节距相差10%.先将推土机从0 km/h加速至5 km/h后,匀速行驶,行驶距离为15 m.当没有进行直驶稳定性控制时,推土机行驶15 m时侧向位移达到-7.5 m,横摆角速度达到-0.25 rad/s,两侧履带速度相差达到2 km/h.当直驶稳定性控制策略进行调节后左侧电机输出转矩大于右侧电机输出转矩,推土机横摆角速度减小趋于0,侧向位移接近0,两侧履带速度也基本相同。可以看出,直驶稳定性控制策略起到了良好的效果。
4.2 两侧电机转矩响应误差及两侧负载存在差异
两侧电机的转矩响应稳态误差差异设置为15%,推土机铲土工况下两侧负载相差5%.先将推土机从0 km/h加速至3 km/h后,匀速行驶,20~35 s推土机铲土,切土深度为0.2 m,35~45 s推土机运土,45 s后卸土空载运行,推土机行驶约30 m,在铲土及运土过程中由于阻力增大,推土机速度降低。当没有进行直驶稳定性控制时,推土机完成所有作业时,横摆角速度达到-0.24 rad/s,两侧履带速度相差达到2 km/h,而且从侧向位移曲线可以看出,推土机已经无法保持直驶而进入了转向运动。当采取直驶稳定性控制后,左侧电机输出转矩大于右侧电机输出转矩,推土机横摆角速度减小趋于0,侧向位移仅1 m左右。由此可以看出,直驶稳定性控制策略起到了良好的效果。
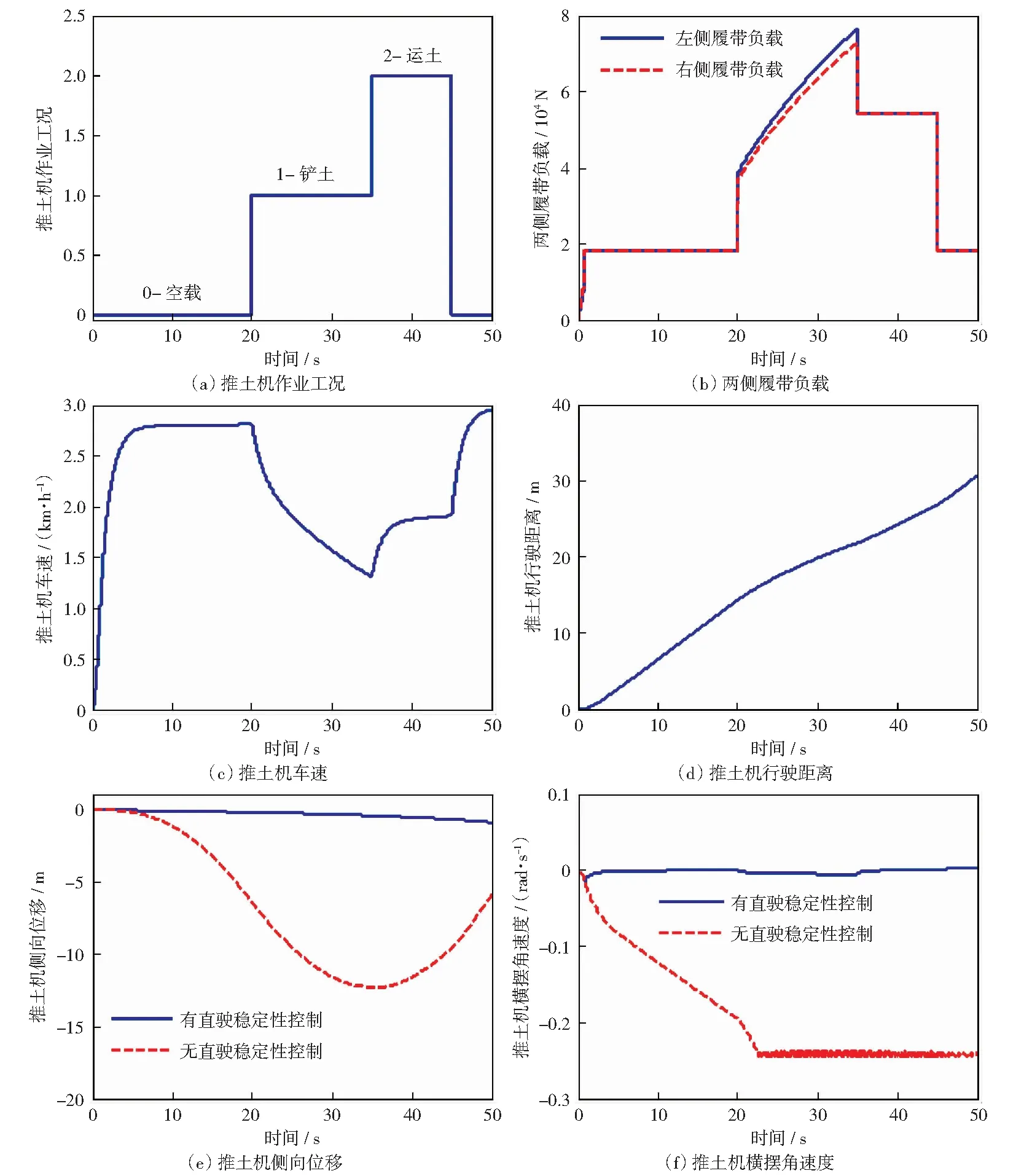
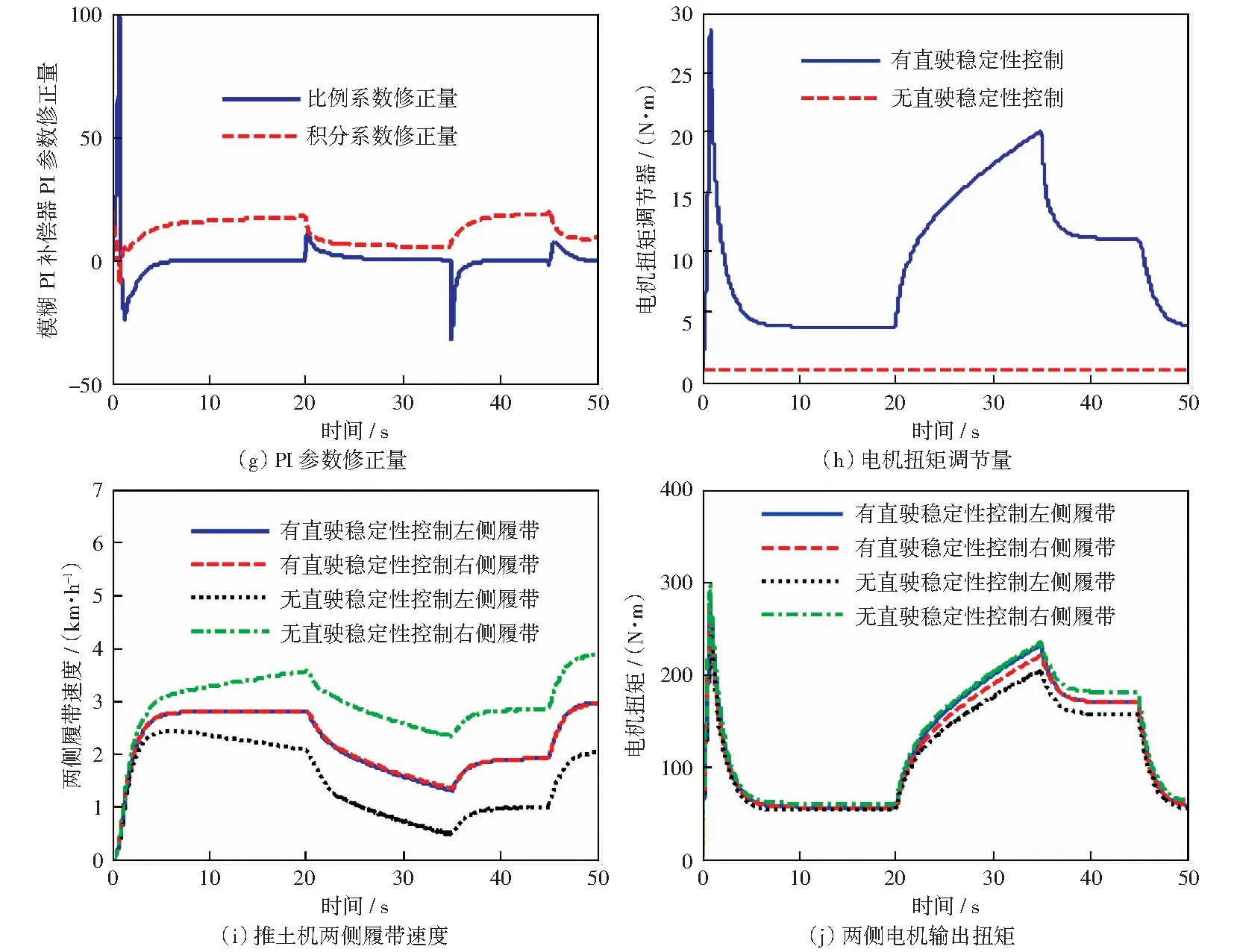
图13 两侧电机转矩响应误差、两侧履带节距及负载存在差异的直驶稳定性仿真结果Fig.13 Straight-line running stability simulation results considering differences in torque response error of two motors and load on both sides
5 结论
1) 对电驱动推土机直驶稳定性影响因素进行了分析,结果表明两侧电机转矩响应差异、两侧履带差异以及两侧负载差异的大小均与推土机偏驶量呈正相关。
2) 设计了基于模糊PID的电驱动推土机直驶稳定性控制策略,以推土机横摆角速度作为反馈参数,根据横摆角速度及其变化率进行模糊推理得到PI参数的修正量,然后通过PID控制器得到两侧电机转矩调节量。对比仿真结果表明,直驶稳定性控制策略起到了良好的效果,推土机横摆角速度可以控制在0 rad/s左右,保证了推土机的直线行驶,证明了文中提出的控制策略可行,可以用于工程实际中电驱动推土机控制系统开发,从控制层面解决推土机偏驶问题。