磁通e-HR神经元模型的Hopf分岔分析与控制
2020-05-13王红梅安新磊杨天宇
王红梅,安新磊,乔 帅,张 薇,杨天宇
(1.兰州交通大学 数理学院,甘肃 兰州 730070; 2.北京交通大学 电子工程学院,北京 100044)
神经元是生物神经系统的基本结构单元,是神经系统的重要组成部分,在调节神经元系统的动态行为中起着举足轻重的作用。其活动主要表现为生物电信号的形成、变化和传递。生物神经系统是一个复杂的多层次信息神经网络,是通过大量神经细胞的连接形成的。因此,在神经元发射和信息编码过程中,涉及到复杂的非线性动力学行为。由于神经元动力学是生物生理学和非线性动力学之间的交叉学科,因此研究神经元的发射具有生物学和动力学意义。随着生物生理学和非线性动力学理论的不断发展,基于不同研究周期的数据建立了各种与生物神经元相关的模型[1]。据我们所知,作为一个数学神经元模型,三个变量的HR神经元模型不能描述离子通道的作用。因此,一些研究者提出了四变量的HR神经元模型[2],该模型可以更好地描述神经元的动态行为,并可通过实验结果验证[3]。
由于神经元系统中的神经元处于复杂的状态,神经元的电活动过于复杂,需要考虑更多的因素。例如,根据法拉第感应定律,神经元中的动作电位的变化可以在介质中产生磁场。通过分析文献[4]可知,神经元的各种放电活动是通过信号的传递完成的,它们因为受电磁场的影响,所以在电磁辐射下可以产生不同的放电状态,如静息态、尖峰放电、簇放电[5]。文献[6]讨论的是HR神经元模型的Hopf分岔分析及稳定性分析;文献[7]用Washout控制器对Morris-Lecar(ML)模型进行Hopf分岔控制;文献[8-15]讨论神经元模型的分岔分析及其存在的隐藏吸引子,并对神经元模型的分岔进行控制。神经元的放电模式极其丰富,故有必要对神经元模型进行深入研究。
研究发现,磁通e-HR神经元模型具有丰富的分岔行为和放电特征。数值模拟分析了当外界刺激电流变化情况下系统的平衡点分布与稳定性分析,并且得出该模型存在亚临界Hopf分岔点。通过数值仿真表明,当系统发生亚临界Hopf分岔时,随着初值的不同,神经元会表现为不同的放电特性。另外,利用Washout分岔控制器对分岔点的分岔类型进行控制,将亚临界Hopf分岔转化为超临界Hopf分岔,从而实现消除膜电压隐藏放电的目的。
1 模型描述
描述神经元模型分岔分析时最常用的模型是Hindmarsh-Rose(HR)神经元模型,但是也有另外一种模型,e-Hindmarsh-Rose(e-HR)神经元模型[16],它具有和HR神经元模型相似的特性。所以,基于e-HR神经元模型,考虑外界电磁场对膜电位变化的影响,引入磁通量后建立的e-HR神经元模型的微分方程如下:
(1)
式中:a,b,c,d,e,f,g,u,s,h,v,k,r,L表示系统的参数;变量x表示神经元的细胞膜电位;y表示快电流;z表示自适应电流;w表示缓慢的动力学过程;φ表示穿过神经元细胞膜的磁通量;I表示的是外部刺激电流;W(φ)是由磁通量控制忆阻器的记忆电导[4],它的表达式可以写为W(φ)=α+3βφ2;此文中的各个参数取值如下:a=1,b=3,c=1,r=3,L=1.619,k0=0.1,d=0.99,e=1.01,s=3.966,k=0.957 3,v=0.000 9,k1=0.9,k2=0.5,β=0.02,f=5.012 8 ,g=0.027 8,u=0.002 15,h=1.605,α=0.1。
2 平衡点的分布
神经元的不同放电模式和平衡点的分布都与它的类型有关,对于模型(1)而言,它的平衡点可以由其动力学方程确定,令x'=0,y'=0,z'=0,w'=0,φ'=0,得到对应的零线方程:
(2)
方程(2)中各个式子的交点就是系统(1)的平衡点,由方程(2)可以得到细胞膜的总电流方程[6]如下:

(3)
将各参数带入式(3)中得:
f(x)=I-1.019 440x3-1.611 082x2-3.936 34x-5.502 459=0
(4)

IH=0.843 392μA/cm2,pH=(-1.305 042,-7.053 972,1.189 635,-17.032 191,-2.349 075),
通过上述分析得出,系统(1)在平衡点pH处有一对实部为零的共轭特征根,因此可知系统(1)在分岔点H处发生了Hopf分岔。

(a)系统(1)平衡点曲线与Hopf分岔点 (b)特征根随外部刺激电流的变化曲线图1 系统随外界刺激电流变化时的两类曲线Fig.1 Two types of curves of the system as a function of external stimulus current
3 Hopf分岔类型的判定
对一些高维的非线性系统来说,求解特征根较繁琐,可用一种较为简便的方法求解特征多项式的根,以此来判定Hopf分岔的类型及其稳定性,从而简化高维系统的计算,较为简便。
令系统(1)为
X'=F(x)
(5)
式(5)中:
下步判断系统(5)在平衡点pH=(-1.305 042,-7.053 972,1.1896 35,-17.032 191,-2.349 075)处的Hopf分岔类型,此时的外界刺激电流I=0.843 392 μA/cm2,在平衡点pH处的线性化矩阵为
矩阵ApH的特征根为
144。
将系统(5)的线性部分提出改写为:
X′=F(X)=ApHX+G(X)
(6)

则:
X'=PY'=ApH(PY+pH)+(PY+pH)
(7)
从而:
(8)

按照Hopf分岔理论可得Hopf分岔稳定性判别式为
(9)
稳定性指标ηH决定Hopf分岔周期解的稳定性,当ηH<0或者(ηH>0)时,系统(5)分岔产生的周期解是稳定(不稳定)的,即系统发生了超临界Hopf分岔(亚临界Hopf分岔),也就是分岔周期解的周期是增加(减小的),判别式(9)中各个量的相关计算表达式为:
通过计算可知,稳定性指标ηH=0.055 92>0,因此可知系统(1)在平衡点pH发生了亚临界Hopf分岔,从而在分岔点H前后系统(1)的稳定性发生了改变,由不稳定态变为稳定状态,并且系统(1)会产生不稳定的极限环。
4 数值模拟
通过上述理论分析可知,当外界刺激电流为IH时,系统(1)在平衡点pH发生亚临界Hopf分岔,从而使膜电压x的放电特性发生变化,因此有必要分析系统(1)在Hopf分岔点H附近的放电特性。当外界刺激电流为I1=0.83 μA/cm2时,此时系统的平衡点为:q=(-1.307 749,-7.110 632,1.178 898,-16.269 609,-2.353 948),在该平衡点处线性矩特征根
所以平衡点q是稳定的结焦点。
当外界刺激电流为I1,初值为(-2.307 749,-7.110 632,1.178 898,-16.269 609,-2.353 948)时,系统(1)膜电压x的时间响应图和相轨迹如图2(a)、(b)所示,此时的膜电压x为稳定的静息态。当外界刺激电流I1保持不变,取初值为(-5.307 749,-7.110 632,1.178 898,-16.269 609,-2.353 948)时,系统(1)的膜电压x的时间序列图和相轨迹如图2(c)、(d)所示,此时膜电压x是周期为2的尖峰放电状态,它的相轨迹为稳定的极限环。由此可知,当外界刺激电流I1保持不变时,初值取值不同,系统(1)的放电模式也会不同,并且产生了隐藏放电现象。
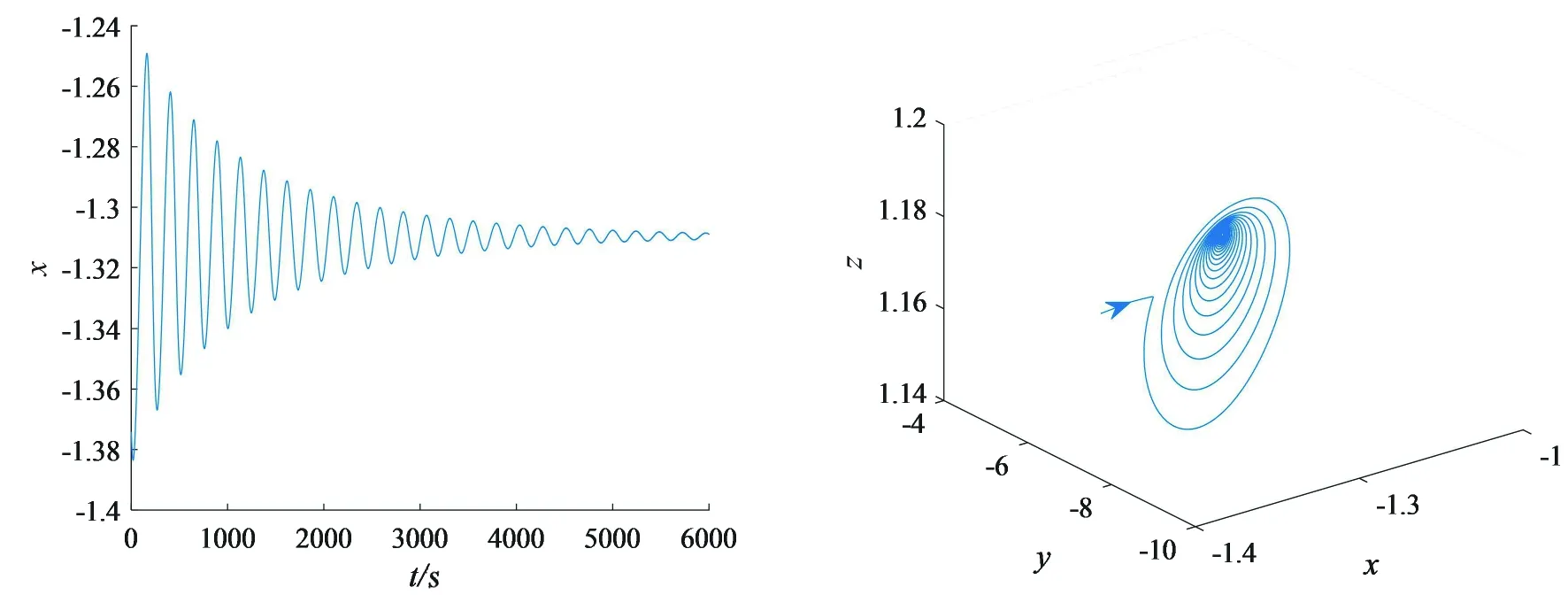
(a)膜电压x的时间序列图 (b)相轨迹
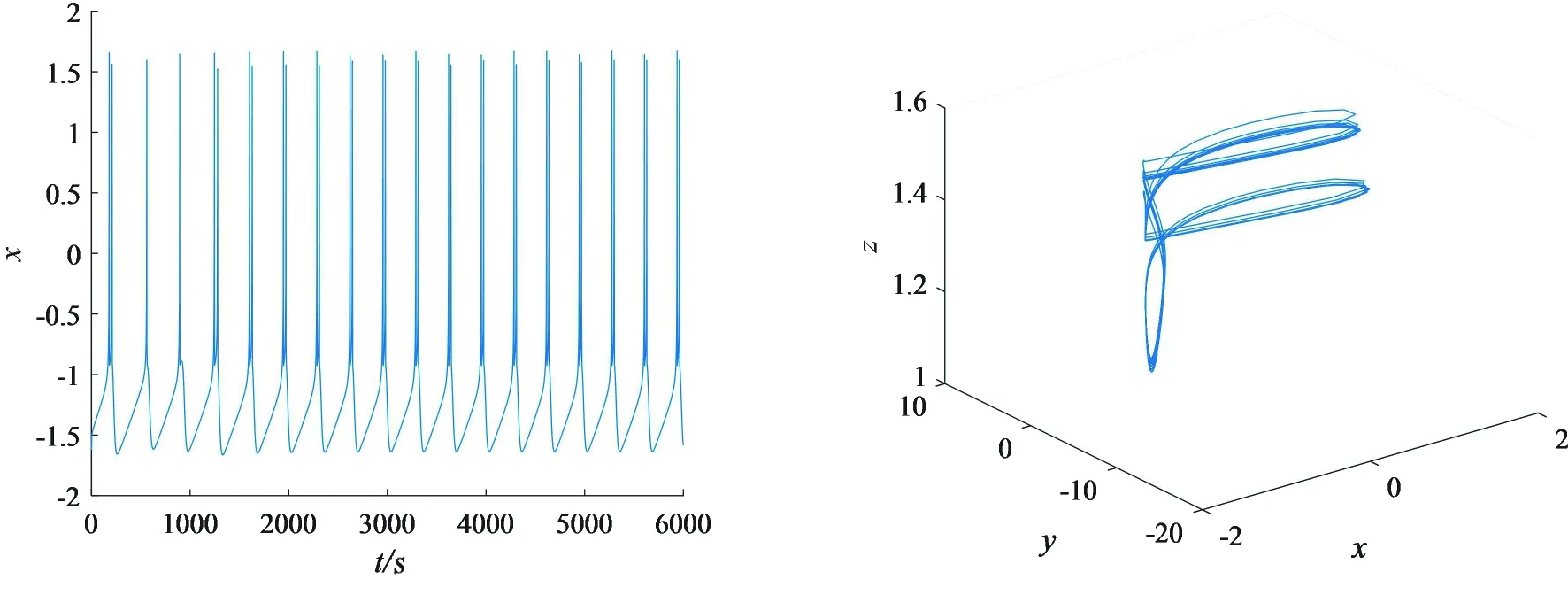
(c)膜电压x的时间序列图 (d)相轨迹图2 系统(1)的放电分析Fig. 2 Discharge analysis of system (1)
系统(1)在平衡点q处的隐藏动力学行为如图3所示。图3中黑星表示平衡点q;红色区域表示稳定平衡点的吸引域,此时膜电压x处于静息态;蓝色区域表示隐藏吸引子吸引域,此时膜电压处于周期为2的尖峰放电。当外界刺激电流为I1时,系统(1)对于不同的初始状态有着不同的放电特性,从而揭示了神经元模型在发生亚临界Hopf分岔时,在平衡点q处产生了隐藏放电现象。因为与神经元相关的各种疾病都是由于神经元发生异常而引起的,所以控制系统(1)的隐藏放电行为具有很重要的实际意义。
5 隐藏动力学控制
由于系统(1)在分岔点H处发生亚临界Hopf分岔,并且在其附近发现隐藏的极限环吸引子,使神经元膜电压产生隐藏放电行为。本小节基于Washout分岔控制器,对分岔点H的Hopf分岔类型进行控制,在不改变平衡点pH位置的前提下,使其亚临界Hopf分岔转化为超临界Hopf分岔,从而使系统(1)在分岔点H处附近的拓扑结构发生改变,由此达到消除膜电压隐藏放电的目的,施加控制后的神经元系统如(10)所示。
(10)
受控系统(10)中的v为Washout滤波器的状态变量,n为控制器的反馈增益,ξ为滤波器时间常数的倒数。当ξ<0时为不稳定的Washout控制器;当ξ>0时为稳定的Washout控制器,因此选取ξ=-0.035,其余参数取值与系统(1)参数取值一样,u=n(x+ξv)3,W(φ)=α+3βφ2。
当外界刺激电流I1=0.83 μA/cm2时,此时受控系统(10)的平衡点为:q'=(q,v')=(-1.307 749,-7.110 632,1.178 898,-16.269 609,-2.353 948,-37.364 256),通过数值仿真发现,当反馈增益n<-0.377 8时,不管膜电压取何值,受控系统(10)的隐藏放电行为完全消失,反馈增益n对受控系统(10)的隐藏放电的影响如图4所示。图4中蓝色区域表示稳定的吸引域,此时受控系统(10)膜电压x处于静息态;红色区域表示隐藏的吸引子,此时受控系统(10)膜电压处于周期为2的尖峰放电;黑星表示受控系统(10)的平衡点。

图3 系统(1)在平衡点q处的隐藏放电区域分析Fig. 3 Analysis of hidden discharge area at equilibrium point q in system (1)图4 反馈增益n对受控系统(10)膜电压x的放电影响Fig. 4 Effect of feedback gain (n)on discharge voltage of controlled system (10) membrane (x)
6 结论
基于理论分析与数值仿真相结合的方法发现,当外界刺激电流I1保持不变时,取不同的初值,系统(1)的放电模式也会不同。通过引入磁通量来分析e-HR神经元模型的分岔分析与平衡点的分布及稳定性可知,系统(1)存在一个分岔点H,且在分岔点H处发生亚临界Hopf分岔,并且在它的附近发现了隐藏的极限环吸引子。运用Washout分岔控制器,对分岔点H进行Hopf分岔控制,使其亚临界Hopf分岔转化为超临界Hopf分岔,从而实现消除膜电压隐藏放电的目的。研究结果有助于探究和控制神经元的隐藏放电行为。
