水平导航控制律设计及仿真验证
2020-04-14黄勇强冷国旗肖成方
黄勇强,相 梅,冷国旗,肖成方
(航空工业洪都,江西 南昌,330024)
0 引言
控制和导航是飞行器完成飞行任务的两种关键技术,它被广泛应用于飞机、导弹和航天器中。对飞机而言,它是稳定和控制飞机以及引导飞机沿一定航线从一处飞到另一处的技术。导航系统与控制系统交联实现自动导航控制,借此可自动控制飞机按预定的航线飞行,自动控制飞机进入预定目标区域或自动返回预定机场。
自动导航控制是一种航迹控制系统,是对飞机的质心运动进行稳定和控制。导航系统提供飞机的姿态、航向、飞机现时坐标位置、应飞航线、待飞距离和对应飞航迹线的偏离信号,自动飞行控制系统接收导航系统的输出信号,通过改变飞机的角运动引导飞机进入并稳定在预定的航迹线上。
从飞行控制运动模态划分,可把自动导航控制划分为水平导航和垂直导航。本文主要介绍水平导航模态的控制过程和控制律的设计,垂直方向采用高度保持控制。
1 导航原理分析
1.1 导航数据解算原理
水平导航控制是在水平面内对应飞航线偏差的控制。通常飞机飞行的航线可能由数个航路中途点构成,导航计算机依次存储这些航路点的地理坐标位置,并根据飞机的位置按顺序给出飞机飞向下一个航路点的航迹线。飞机与导航点水平相对位置关系解算主要是给出飞机当前点距目标点的距离(Dist)、目标点相对当前点的方位角(Dir)以及航线偏差(CTE)。原理图见图1。
如图 1 所示,A、B、C 为航路点,P 为飞机位置,P’为P在航线AB上的投影。导航计算问题可以描述如下:
已知:各航路点的经度、纬度和飞机当前经度、纬度。
求:P点相对于AB航线的侧向偏离CTE,PB航向 Dir,P’B 航向(基准航向)Dir_0,PB 距离 Dist。

图1 水平导航原理图
通过将各航路点经纬度及飞机当前经纬度转换为地面坐标系水平面xz方向的坐标 (地面坐标系定义如图2所示),可计算出AB航线的航向Dir_0、PB航向Dir以及P点距导航点B的距离Dist,进而侧向偏离距离CTE及P’B的求法如下:


图2 地面坐标系
1.2 航路中途点的切换
当飞机的航线是由几个航路中途点组成的航迹线段时,必然会存在一个在飞机飞到本段航路点时,何时和怎样飞向下一个航迹线段的情况。
有两种可供选择的航路点转换控制方式,一种是飞机不飞过航路中途点,当飞机接近航路中途点时,完成航路中途点的转换,自动给出下一个中途点(或目标点)的控制信号;另一种方式是压点飞行,即当飞机飞越本段航路终点后完成飞向下一个中途点(或目标点)的转化。
两种航路点转换控制方式的示意图如图3所示。
1.2.1 压线飞行
导航模块每步长都计算飞机当前位置在航线上的投影距下一导航点距离L及转弯半径,算法见公式(1)、(2)。
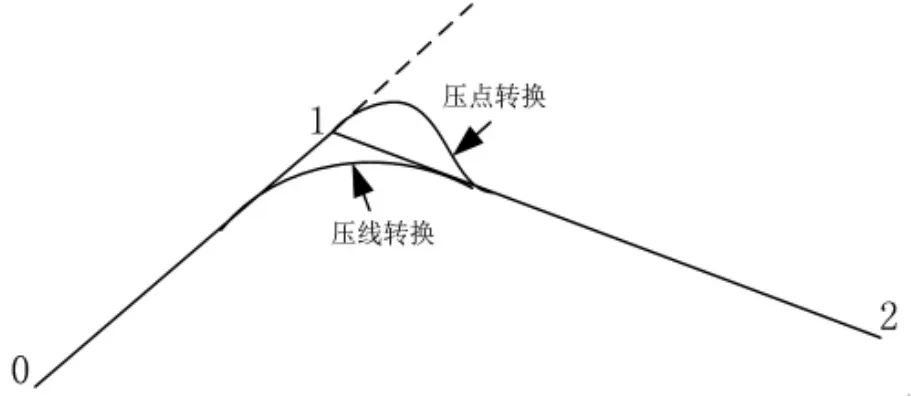
图3 两种航路点转换控制方式示意图

其中:v为飞行速度;ny为法向加速度;Ang为导航点转换时的转弯角度,可根据导航点的坐标求得。
当导航模块计算出的转弯半径KR×R≥L(KR为调整参数,与飞机飞行速度有关)时,飞机开始转向下一导航点,即导航计算用的初始点为飞机转向前的目标点,导航计算用的目标点为下一导航点。如果导航模块没有初始点输入,则导航模块输出的CTE为0。
1.2.2 压点飞行
导航模块每步长计算出的飞机当前位置距下一导航点距离L≤10m时,飞机开始转向下一导航点。
2 水平导航控制律设计
大圆航线飞行时,侧向偏离距离CTE是主控制信号。当CTE=0时,要保持飞机不偏离预定航迹线,必须使飞机的航向角psi=Dir_0,即Δpsi=0。由此我们可用侧向偏离距离CTE和航迹角偏差△psi构成导航综合控制信号GamacL。

式(3)中,KY和Kdz为信号的传动比,应根据倾斜角内回路的设计进行选择。
由于定义飞机偏离应飞航迹线右边时CTE为正,飞机应向左转弯,而飞机机头偏离应飞航线左边时Δpsi为正,飞机应向右转弯,所以式(3)中两个控制变量的符号是相反的。
为防止侧向偏离距离CTE过大时造成转弯角大于90°,使CTE的修正过程产生如图4所示的“S”形轨迹运动,需对CTE进行限幅处理。
利用解算的飞机对预定航迹线的侧向偏离距离CTE、航向角Dir和偏航角反馈为输入,输出为滚转角指令,控制算法如公式(3)所示,导航控制律框图如图5所示。
其中校正环节使飞机以最近的方式转向目标点,及转弯航向偏差不大于180°。
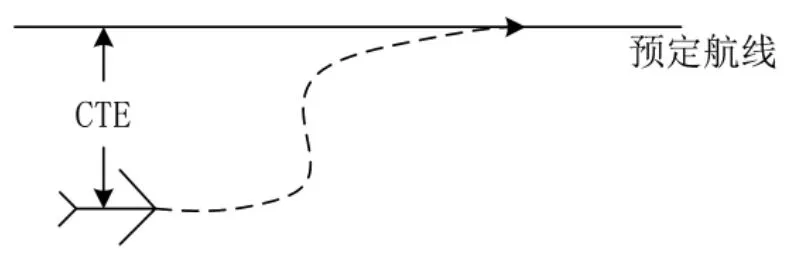
图4 过大的CTE引起“S”形轨迹运动

图5 水平导航控制律框图

图6 垂直方向高度保持控制律框图
3 高度保持控制律
为使飞机接通水平导航功能时,能够在水平面内压点或压线飞行,垂直方向采用高度保持控制功能,防止飞机在导航点转换时因滚转导致掉高。高度保持控制律框图如图6所示。
输入为水平导航模态接通时刻的高度,反馈为高度、俯仰角速率、垂直速度,输出为纵向控制指令,同时引入滚转角速率、滚转角进行高度补偿。
4 仿真分析
选取状态点5km0.6M进行水平导航仿真,验证水平导航控制律。导航点设置如表1所示。
说明:1)切换方式1为压点飞行,切换方式2为压线飞行;
2)数学仿真时,将第一个导航点转换为仿真开始时的坐标点。

表1 导航点设置
压点飞行水平导航跟踪曲线如图7所示,仿真曲线如图9所示。
压线飞行水平导航跟踪曲线如图8所示,仿真曲线如图10所示。
仿真曲线中符号说明:H—高度,M—马赫数,Alpha—迎角,Theta—俯仰角,Sit—航迹倾角,Wzt—俯仰角速率,Nyg—法向过载,Beta—侧滑角,Gama—滚转角,Wxt—滚转角速率,Wyt—偏航角速率,Nzg—侧向过载。
根据水平导航跟踪曲线图7和图8可以看出,飞机可以精确的实现沿航线飞行,并按照压点或压线方式,实现导航点的切换。从时域仿真曲线图9和图10可以看出,在导航点切换时,飞机能够快速平滑滚转,到达相应航线后,飞机恢复平飞状态。

图7 压点飞行水平导航跟踪曲线

图8 压线飞行水平导航跟踪曲线

图9 压点飞行水平导航仿真时域图
5 结论
本文通过分析水平导航控制原理,设计水平导航控制律,该控制律能实现飞机沿航线精确稳定飞行,并根据导航点切换逻辑,实现压点或压线飞行。最后通过数学仿真验证,设计的水平导航控制律能够实现水平航迹的精确稳定控制,并实现压点和压线飞行。

图10 压线飞行水平导航仿真时域图
