计及暂态电压稳定性的自适应低频减载方案
2019-12-21何培灿温步瀛王怀远
何培灿,温步瀛,王怀远
(福州大学电气工程与自动化学院,福建 福州 350108)
0 引言
频率是衡量电力系统电能指标的重要指标之一,保障电力系统的频率稳定性对电力系统的安全稳定运行至关重要[1-2].电力系统中发电机机组安全、负荷电能质量、系统稳定运行都需要系统频率维持在偏差允许范围内[3-4],从本质来看,频率问题实际上是电力系统有功功率平衡的问题.当系统发生发电机组脱落、联络线开断等故障扰动时,区域内的有功平衡被打破,会导致小系统内的频率升高或者跌落,给电力系统带来失稳的风险.
低频减载(under frequency load shedding,UFLS)作为电力系统第三道防线的重要组成部分,是阻止频率崩溃事故最根本的措施[5-7].合理配置低频减载方案对切负荷控制的有效性起到重要作用.近年来,广域量测系统(wide area measurement system,WAMS)不断发展[8-10],其中,同步相角测量装置(phasor measurement unit,PMU)分布在系统关键测量点,其能够对电网运行情况进行数据采集、实时监测和分析计算[11-13],为自适应的低频减载方案发展提供了实际工况的条件.
目前,自适应的低频减载方案得到了许多发展和优化.文[14-15]采用频率变化率变化梯度逐轮对减载量进行动态修正,发挥了系统自身调节能力以达到减小控制量的目的.文[16]结合扰动下多区域复杂互联电网故障区域辨识方法,提出基于广域局部瞬时量测信息的自适应低频保护策略.文[17]提出基于负荷减载控制灵敏度的减载地点选取方法及减载量分配模型.但这些控制策略中,暂态电压稳定性在自适应低频减载方案中仍未得到充分的考虑,在切负荷控制过程中可能造成电压不稳定的风险.文[18]提出衡量负荷暂态电压稳定性的Y指标去整定切负荷量,有利于保障系统在大扰动后的频率电压稳定性,但在计算功率缺额时未考虑负荷电压偏移造成的有功缺额影响,同时没考虑到当系统发生机组脱落等扰动时,惯量往往会发生较大变化,采用固定惯量去计算不平衡功率,这将会带来较大误差.
因此,根据电力系统的频率响应信息,提出系统惯量的实时辨识方法.考虑电压造成的有功缺额影响,得到系统功率缺额的计算方法.同时,结合系统暂态电压稳定指标整定出自适应的低频减载方案,有效提高系统频率和电压的稳定性.
1 低频减载方案分析
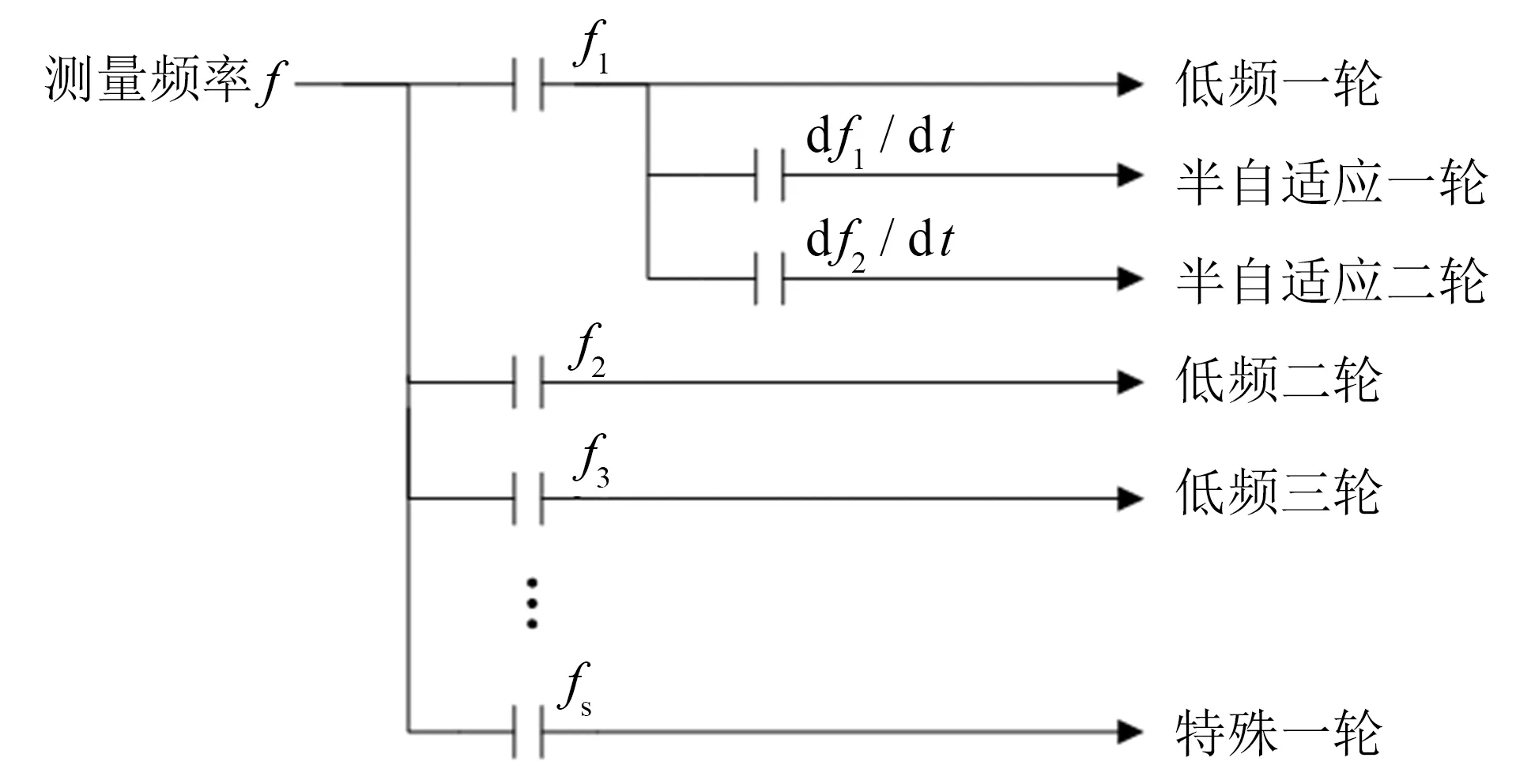
图1 传统与半自适应型低频减载方案核心逻辑图Fig.1 Core logic diagram of traditional and semi-adaptive UFLS schemes
目前,国内外广泛采用传统逐轮次的低频减载方案.即在低频减载装置设置几个门槛值,当母线频率下降至门槛值以下时,经过一定的延时切除定量负荷.其中,频率门槛值、切负荷量、时间延时等关键参数都是由离线计算整定的,这些参数的设置对减载效果起到关键作用.而半自适应型低频减载方案是在传统方案基础上,将母线频率变化率也设为切负荷控制的门槛值之一,防止因母线的频率下降过快而带来频率崩溃.两类低频减载方案的核心动作逻辑示意图如图1所示.
传统逐轮次和半自适应型低频减载方案都属于固定切负荷控制,对于系统中多样的运行情况和扰动故障缺乏足够的适应性,往往会造成过切或欠切的结果,其有效性取决于实际工况与预设方案的贴合度.此外,在各个负荷节点都切除预设的负荷量,未考虑暂态电压稳定性在切负荷控制中的影响,容易造成电压失稳的风险.
2 系统功率缺额的计算
当系统发生扰动出现功率缺额时,母线频率会不断下降乃至危害系统稳定.系统功率缺额包含了不平衡功率和电压偏移造成的有功缺额影响两部分.不平衡功率的计算需要系统的实时惯量信息,当系统发生机组脱落等扰动时,系统惯量往往会发生较大变化,需要基于扰动后的信息去重新整定实时惯量;电压偏移造成的有功缺额影响主要体现在当负荷电压降低时,负荷有功随之减少的部分.
2.1 扰动后不平衡功率的计算
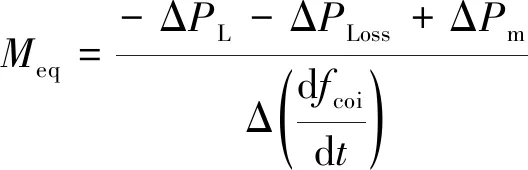
发电机的不平衡功率如下式所示,

(1)
式中:ΔPu为不平衡功率;Meq为系统等值惯量;fcoi为惯量中心频率;PL为负荷有功;PLoss为线路损耗;Pm为机械有功.
联立两个时刻的不平衡功率表达式,取这两个时刻可以解出Meq,
(2)
其中,取扰动后两个相近时刻的数据,由于线路损耗和发电机调速器的限制,忽略ΔPLoss和ΔPm的大小,取这两个时刻可以解出Meq,
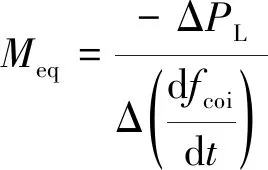
(3)
由此基于扰动后负荷有功和惯量中心频率信息可以计算系统的等值惯量,再将Meq代入式(1)可计算扰动后系统的不平衡功率ΔPu.
2.2 电压造成的有功缺额影响的计算
静态负荷模型如下式所示,

(4)
式中:PL是负荷实时有功;PL0是负荷在额定频率和初始电压U0下的稳有功;Ut是负荷实时电压;a,b,c,LDP分别是负荷恒阻抗、恒电流、恒功率部分比例和有功频率因子.
发电机也是电力系统中重要的电压源,当发生机组脱落等扰动时,不仅频率会下降,也往往会伴随着电压的跌落.由式(4)可得,频率下降和电压跌落会降低负荷有功水平,而在扰动初期,频率下降还很小,电压偏移是负荷有功变化的主要原因,而这部分负荷有功变化在功率缺额的计算中无法忽略.因此,定义电压造成的功率缺额影响ΔPv如下:
ΔPv,t=T=PL0-PL,t=T
(5)
式中:ΔPv,t=T是发生系统扰动后t=T时刻电压偏移造成的有功缺额部分;PL,t=T是t=T时刻的负荷有功.
有了不平衡功率的计算方法,补偿电压偏移造成的有功缺额影响部分,系统的功率缺额ΔP便可得到计算.
ΔPt=T=ΔPu,t=T+ΔPv,t=T
(6)
根据计算得到的系统功率缺额,便可以进一步制定自适应的低频减载方案.
3 计及暂态电压稳定性自适应低频减载方案
目前的低频减载方案往往把频率稳定作为主要的指标,在控制过程中缺乏对暂态电压稳定性的考虑,会造成电压失稳的风险.在计算出系统功率缺额后,考虑暂态电压稳定性进一步进行控制.
3.1 基于暂态电压稳定指标的切负荷量控制
文[18]提出衡量负荷节点暂态电压稳定性的Y指标,在低频减载控制过程中采用Y指标去分配各负荷节点切负荷量.各负荷节点的Y指标和所分配的切负荷量ΔPj如下两式所示.

(7)
(8)
式中:Qj(t)为t时刻第j个负荷所吸收的无功功率;Uj(t)为t时刻第j个负荷的节点电压;t0表示扰动时刻;系统内有N个负荷节点;Y指标与负荷吸收的无功成正比,与负荷电压的平方成反比.当Y指标越大时,该节点的暂态电压稳定性越差.
在切负荷控制时,可根据式(8)对Y指标越大的负荷节点,切除更大比例的负荷量,在一定程度提高低频减载控制过程中的暂态电压稳定性.但这样的控制方法存在一个问题,在电力系统中,频率是一个全局量,电压是一个局部量,仅依靠Y指标去分配切负荷量可能会导致一些节点无法切除足够的控制量,从而出现同步稳定性问题的风险.因此,将功率缺额分成ΔP1和ΔP2两个部分进行切除,ΔP1分配到各个负荷节点进行切除;ΔP2按照Y指标对各个负荷节点进行切除,如下式所示.
ΔP1=k×ΔP,ΔP2=(1-k)×ΔP
(9)
式中:k为功率缺额分配系数.
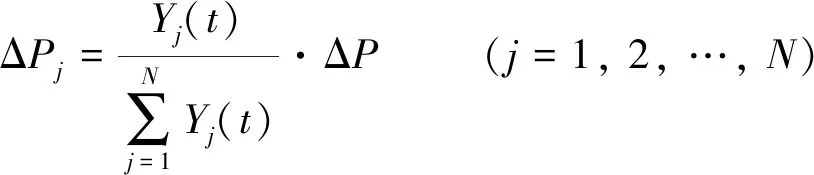
分配到每个负荷节点的两部分切负荷量ΔP1j和ΔP2j如下式所示.
(10)
式中:PjL0为第j个负荷节点发生扰动前时刻的有功.将功率缺额分成两部分切除,在每个节点都切除相应的控制量ΔP1j,不会发生各个负荷控制量相差较大的情况,防止区域内发生过大的潮流转移;其次按照Y指标去切负荷量ΔP2j,在保证频率能够恢复稳定的同时充分考虑各个负荷节点的暂态电压稳定性.
3.2 自适应的低频减载方案
根据式(6)和式(8)可以计算出系统功率缺额和各负荷节点分配的切负荷量,进一步制定自适应的低频减载方案,工作流程步骤如下.

图2 自适应低频减载方案流程图Fig.2 A flow chart of adaptive UFLS scheme proposed
步骤2 选取扰动后的两个相近的时刻t1和t2,根据式(3)整定系统的等值惯量Meq,进一步计算出系统扰动后的不平衡功率ΔPu.
步骤3 考虑负荷电压偏移造成的有功缺额ΔPv,根据式(6)可以计算出系统功率缺额ΔP.
步骤4 根据式(7)计算出衡量各负荷节点的暂态电压稳定性的Y指标,进一步通过式(8)计算出各负荷节点分配的切负荷量ΔP1j和ΔP2j,本方案中设置功率缺额分配系数k=0.7.
步骤5 设置频率门槛值f1=49 Hz,延时时间td=0.2 s,每个负荷节点分别切除ΔP1j和ΔP2j两部分负荷量.
步骤6 设置特殊轮,频率门槛值fs=49 Hz,延时时间ts=10 s,切除5%的负荷量,防止由于未考虑因素导致的频率悬停.
具体控制流程如图2所示.
4 算例
在IEEE-39节点系统进行算例验证,仿真软件为中国电科院开发的电力系统分析综合程序(PSASP).场景设置如下,在0.2 s时刻设置扰动,G5和G7号机组同时脱落,同时14-15线路、16-17线路断线,即在IEEE-39系统中右下角建立孤岛,以此孤岛作为控制对象.其中,发电机模型采用E′q恒定模型,带调压器、调速器.负荷采用的是58%恒阻抗,16%恒电流和26%恒功率的负荷模型.仿真中用到的发电机信息、负荷信息分别如表1、表2所示.
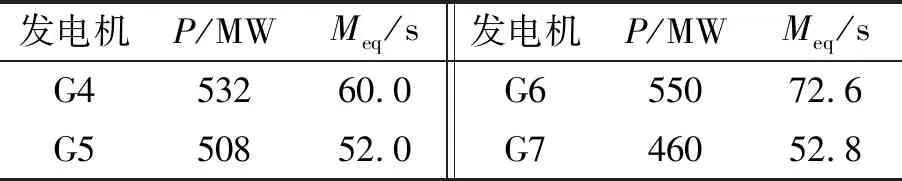
表1 各发电机有功和惯量Tab.1 Power and inertia of each generator

表2 各负荷节点有功Tab.2 Power of each load

当t=1.09 s时,惯量中心频率下降到fcoi=49 Hz.根据式(3),取t1=0.89 s,t2=1.28 s两个时刻的惯量中心频率变化率和负荷有功信息计算系统等值惯量,得到的Meq=127.75 s,与真实值132.6 s十分接近,误差为3.6%.
在计算得到系统等值惯量Meq=127.75 s后,根据式(1)可以计算出t=1.09 s时刻的不平衡功率,
根据式(5),可以计算出t=1.09 s时刻电压偏移造成的有功缺额,
ΔPv,t=1.09 s=PL0-PL,t=1.09 s=348.9 MW
进一步地,根据式(6),可以得到计算的系统功率缺额,
ΔPt=1.09 s=ΔPu,t=1.0 s+ΔPv,t=1.09 s=627.8 MW
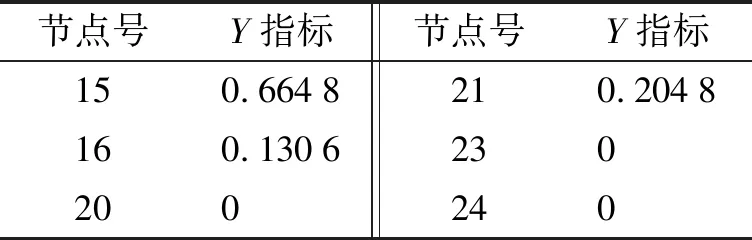
表3 各负荷节点的Y指标Tab.3 Y-index of each load node
将计算的系统功率缺额转化成比例为36.77%,与真实值36.63%十分接近.根据式(7)可以计算出反映各负荷节点暂态电压稳定性的Y指标,如表3所示.
其中,负荷采用恒阻抗模型的节点Y指标为0.在算例中,功率缺额分配系数取k=0.7,根据式(10)分配各个负荷节点的两部分切负荷量ΔP1j和ΔP2j,当频率到达切负荷门槛值49 Hz时,延时0.2 s进行两部分的切负荷控制.其中,在第一部分中切除各个负荷节点25.74%的负荷量;第二部分中,考虑负荷暂态电压稳定性进行控制,将表3代入式(10)可得,负荷15切除56.90%的负荷量、负荷16切除13.05%的负荷量、负荷21切除21.47%的负荷量.
将本低频减载方案与方案一和方案二进行对比,得到频率恢复曲线和最低电压恢复曲线分别如图3、图4所示.其中,方案一采用南方电网广东地区的低频减载方案[19],具体详见表4;方案二采用文[15]提出的方案.
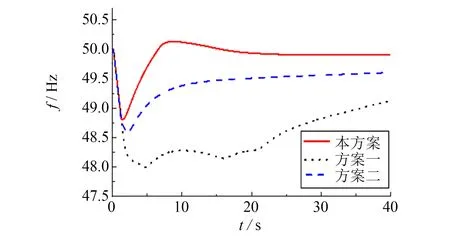
图3 不同低频减载方案的频率恢复曲线图Fig.3 Frequency recovery curves of different UFLS schemes

图4 不同低频减载方案的最低电压恢复曲线图Fig.4 Minimum voltage recovery curves of different UFLS schemes

表4 南方电网广东地区低频减载方案Tab.4 UFLS scheme of Guangdong province of China Southern Power Grid
不同低频减载方案的频率恢复曲线如图3所示.从图3可见,在短时间内,方案一的频率无法恢复至稳定,需要更多轮次的减载动作和更长的恢复时间.方案二相较于本方案所需恢复时间更长,出现更低的最低频率.说明本方案具有更强的频率恢复稳定能力,更快的恢复速度,对复杂的扰动场景具有更好的自适应性.尽管本方案的频率在恢复过程中出现了一定的超调,但结果仍在稳定范围内,这是由于计算出的功率缺额集中在一次进行切负荷控制,在提高控制速度的同时带来了一定程度的超调.
不同低频减载方案的最低电压恢复曲线如图4所示.从图4可见,在短时间内三种方案的最低电压都能恢复至稳定水平.本研究计及暂态电压稳定性的自适应低频减载方案,相较于方案一和方案二,提高了电压恢复速度.
5 结语
根据系统发生扰动后的惯量辨识,提出系统不平衡功率的实时计算方法,补偿电压偏移造成的有功缺额影响,给出系统发生扰动后功率缺额的实时计算方法.进一步地,结合衡量负荷暂态电压稳定性的Y指标,将计算的功率缺额分成两部分进行切负荷控制.一部分考虑到频率作为系统的全局量,对系统内的每个负荷节点都切除相应比例的负荷量,防止区域内出现过大的潮流转移;另一部分考虑到电压作为系统的局部量,需要提高系统的暂态电压稳定性.在IEEE-39节点系统中进行算例仿真,从频率恢复曲线和最低电压恢复曲线可以看出,本方案的控制效果及时有效.尽管在控制过程中会带来一定的超调量,但发电机的调速器和调压器会有效降低超调带来的风险,同时充分发挥系统内控制器的作用.对比其他方案,本方案具有更良好的自适应性.
