综合电机特性的柔性关节空间机器人全阶滑模控制
2019-12-21朱安,陈力
朱 安,陈 力
(福州大学机械工程及自动化学院,福建 福州 350108)
0 引言
随着人类对太空探索的不断深入,必然出现大量如空间站的组装、故障卫星的回收、太空垃圾的清理等太空任务,利用空间机器人来完成上述太空任务已被各国研究人员认为是一种行之有效的方案.因此,对空间机器人系统动力学与控制的研究被越来越多的学者关注[1-6].由于空间机器人的关节谐波减速器及传动机构等存在固有的柔性,因此其关节不可避免地存在柔性.继续用纯刚性关节假设的空间机器人系统显然已经达不到太空任务的要求,如何对关节存在柔性的空间机器人进行精确控制已被众多研究者重视.
Ulrich等[7]对柔性关节空间机器人系统的动力学方程进行了推广,且提出了一种扩展卡尔曼滤波策略.Steve 等[8]对柔性关节空间机器人的自适应反馈控制进行了研究,提出一种基于分散自适应控制的复合控制方案;Zarafshan等[9]将空间机器人系统划分为刚性和柔性两部分,得到了其精确的动力学模型,且基于虚拟阻尼参数的变化规律,提出一种自适应混合抑振算法;张奇等[10]根据关节驱动电机的动力学特性建立了柔性关节机器人系统动力学模型,且得出了柔性关节等效刚度和关节力矩的非线性关系.但上述研究人员均未考虑电机特性,而在空间机器人系统的动力学模型中,考虑电机的动力学特性,以表现特别是在高速力矩、高变化负载、摩擦和电机饱和等因素下完整的动力学特性及实现高精度的轨迹跟踪是至关重要的.此外,电机的动力学特性会影响系统的动态特性和稳定性,甚至在机器人动力学模型中占主导.因此,本研究在建模过程中尝试将电机特性考虑到动力学模型中,从而表现空间机器人完整的动力学特性与轨迹的高精度跟踪.
滑模控制因具有良好的鲁棒性而获得了大量关注[11-13],但因传统滑模控制器中含有切换项,其不可避免地存在抖振问题.若不消除或抑制抖振,其会激发系统建模时忽略的高频动力学特性,进而使得控制性能下降,甚至造成机械部件的磨损.近年来全阶滑模控制备受学者关注[14-15],相较于传统滑模控制,其不存在切换项,可以在保持传统滑模鲁棒性强、结构简单等优点的同时,有效地克服抖振问题,并保证系统收敛到平衡点.由于空间机器人在工作的过程中不断消耗液体燃料,且恶劣的太空环境使空间机器人系统参数摄动.因此,一般情况下,空间机器人系统的参数难以准确获得,而径向基(radial basis function,RBF)神经网络能以任意精度逼近非线性项,故采用其对因系统未知参数而产生的非线性项进行逼近.因此,基于奇异摄动理论,将柔性关节空间机器人系统分解为由柔性关节引起的系统柔性运动部分的快变子系统和系统刚性运动部分的慢变子系统.针对快变子系统,采用了速度差值反馈控制方案主动抑制空间机器人关节的柔性振动;针对慢变子系统,提出了基于径向基神经网络的全阶滑模控制方案来进行空间机器人机械臂的轨迹跟踪.最后,通过系统的数值仿真结果来证明所提的控制方案对柔性关节空间机器人具有良好控制效果.
1 系统动力学方程

图1 自由漂浮柔性关节空间机器人系统Fig.1 Free-floating flexible joint space robot system
不失一般性,自由漂浮柔性关节空间机器人系统的几何模型如图1所示.其中XOY为平动的惯性参考坐标系,X0O0Y0为固定在载体质心上的坐标系,XiOiYi(i=1,2)是固定在关节铰中心上的坐标系.其他符号定义如下:m0、I0、d0分别为载体质量、转动惯量、质心到第一个关节铰中心的距离;mi、Ii、Li、di(i=1,2)分别为第i个机械臂的质量、转动惯量、长度、质心到第i个关节铰中心的距离;Iαi(i=1,2)为各电机转子的转动惯量;ki(i=1,2)为各柔性关节的等效扭转刚度;θ0、θi、θαi(i=1,2)分别为载体姿态角、机械臂转角和电机转角.

图2 柔性关节示意图Fig.2 Schematic of flexible joint
图2为柔性关节示意图,其中ταi(i=1,2)为各电机输出力矩,τLi(i=1,2)为各电机轴负载力矩,τRi(i=1,2)为各关节输入力矩,ni(i=1,2)为关节谐波减速器减速比.
由图1可以导出在惯性参考坐标系XOY下的系统总质心矢径rC、载体质心矢径r0、机械臂i(i=1,2)质心矢径ri分别为
rC=[xC,yC]T
(1)
r0=[x0,y0]T
(2)

(3)
式中:xC,yC、x0,y0分别为系统总质心、载体质心的坐标值;ai(i=0,1,2)为xi轴的基矢量.
系统总质心的定义为
(4)
式中:M=m0+m1+m2.由式(1)~(4)可解出

(5)
式中:λ00=-(m1+m2)L0/M,λ01=-(m1d1+m2L1)/M,λ02=-m2a2/M;λ10=L0+λ00,λ11=a1+λ01,λ12=λ02;λ20=λ10,λ21=L1+λ01,λ22=a2+λ02.

(6)

(7)

(8)

在忽略太空环境微重力的影响下,空间机器人系统动量矩守恒,假设系统初始动量矩为零,即

(9)


(10)
式中:Ξϑ、Ξα∈R2×2为系统动力学参数及系统广义坐标的函数.因此,结合式(8)、(10)可得完全驱动形式的柔性关节空间机器人动力学方程
(11)

2 控制器的设计
2.1 快变子系统控制器的设计
基于奇异摄动理论,把电机输出力矩τα分为主动抑制关节柔性振动的快变子系统控制力矩τf和保证机械臂轨迹跟踪性能的慢变子系统控制力矩τs
τα=τf+τs
(12)
令柔性关节简化的线性弹簧弹力zϑ=K(qα-qϑ)为快变量,机械臂转角qϑ为慢变量.定义正比例因子ε及正定对角矩阵K1∈R2×2,并使其取值满足如下关系

(13)
通过式(13)可将式(11)的第二、三式合并为如下形式

(14)
若设计如下形式的快变子控制力矩

(15)
式中:Kf=K2/ε,K2∈R2×2为正定对角矩阵.则将式(12)、(15)代入式(14)得快变子系统动力学方程

(16)


(17)

由文献[13]知τα=Kαia,结合式(12)得
(18)
式中:Kα∈R2×2为电机灵敏度矩阵.结合式(16)~(18)可得电流形式的快变子和慢变子系统动力学方程为:

(19)

2.2 慢变子系统控制器的设计
性质1正定惯性矩阵Dsαϑ满足有界性,即

(20)


(21)


(22)
基于式(22)设计如下全阶滑模变量:

(23)
式中:ηi=diag(ηi1,ηi2)(i=1,2)为正定常数矩阵,且ηi的选取应保证多项式p2+η2jp+η1j(j=1,2)的特征根具有负实部.
控制器采用类似一阶低通滤波器的形式

(24)
式中:Λ=diag(Λ1,Λ2)为正定常数矩阵;iL∈R2×1为滤波后虚拟控制列向量,其具体形式由下文给出.
将式(24)代入式(19)第二式并整理得

(25)
对式(23)求导可得

(26)



ρ=W*Tφ(y)+δ
(28)


(29)



(30)
式中:β1>δN,β2>0,isϑ定义如下
(31)


(32)

因此,基于上述分析,针对综合电机特性的柔性关节机器人系统,采用图3所示的控制结构.
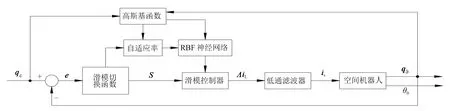
图3 基于径向基神经网络的全阶滑模控制Fig.3 Full order sliding mode control based on RBF neural network
定理1对于给定的慢变子系统动力学方程式(19),假如全阶滑模变量采用如式(23)所示形式,控制率采用如式(30)所示形式,径向基神经网络自适应率采用如式(32)所示形式,则可保证系统渐进收敛.
证明 选取如下形式的Lyapunov函数

(33)
对V求导得

(34)
结合式(27)、(28)、(30)、(34),并利用性质2得
将式(32)代入式(35)得

(36)

(37)

3 数值仿真


图4 所提策略的载体姿态角变化情况Fig.4 Attitude angle change of the proposed strategy
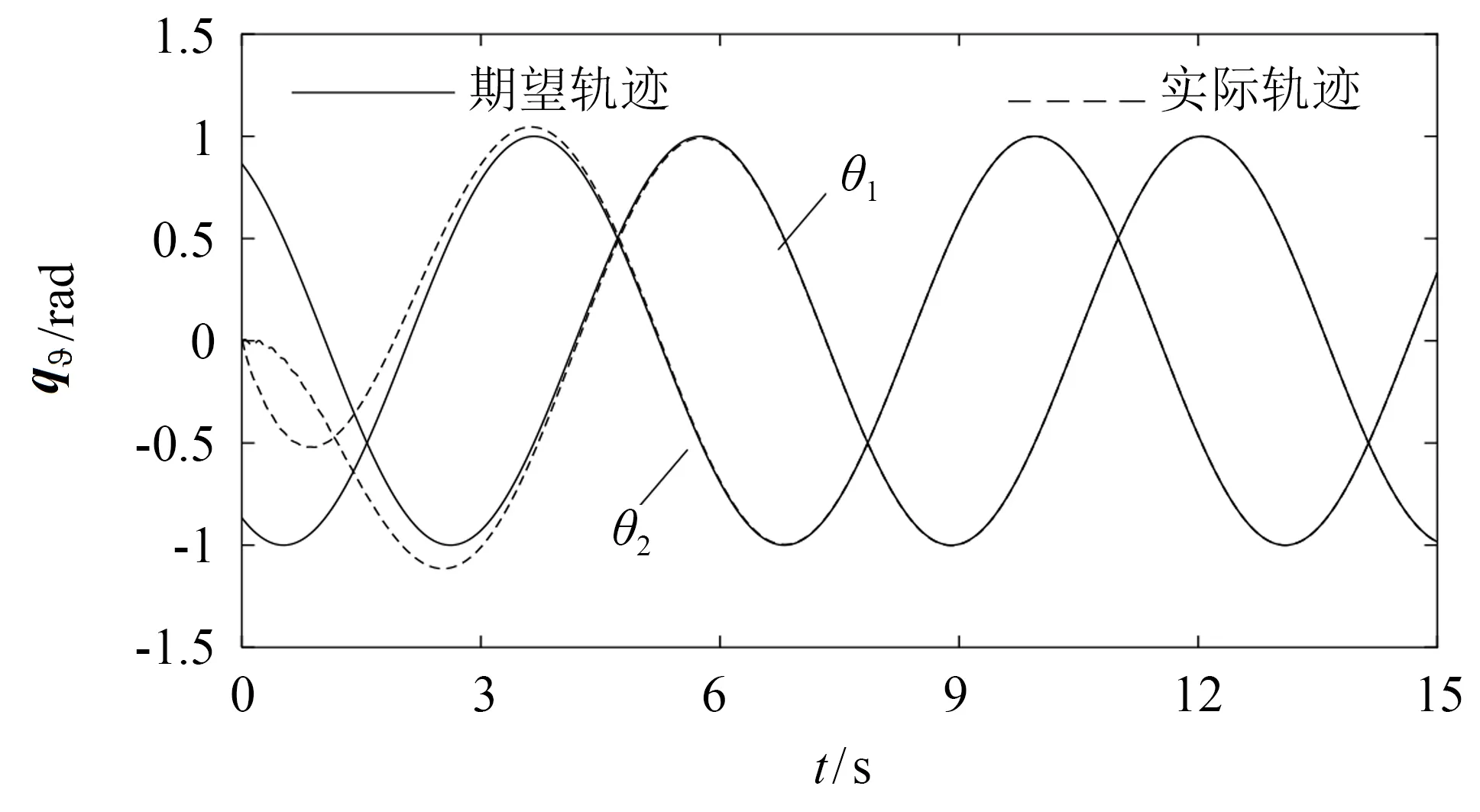
图5 所提策略的两机械臂转角跟踪情况Fig.5 Two manipulators' angle tracking of the proposed strategy
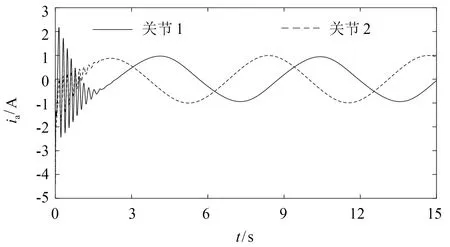
图6 所提策略的两关节电机输出电流情况Fig.6 Two joints motor current of the proposed strategy

图7 关闭快变子系统控制电流后机械臂转角跟踪情况Fig.7 Two manipulators’ angle tracking after closing the controlcurrent of fast subsystem
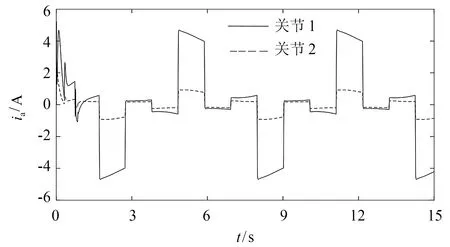
图8 传统滑模控制策略的两关节电机输出电流情况Fig.8 Two joints motor current of the traditional sliding mode control strategy
由图5的结果可以看出,所提的控制策略在系统参数未知且具有较大的初始误差的情况下,仍具有较好的跟踪效果;由图5、7的对比可以看出,速度差值反馈控制器对柔性振动主动抑振的效果明显;由图6、8的对比可以看出,所提的控制策略可以使输出信号变得光滑,说明其很好地克服了传统滑模控制策略中存在的抖振问题.
4 结语
研究利用系统动量、动量矩守恒关系及第二类Lagrange法,并综合考虑关节驱动电机特性,建立了基于电机电流的柔性关节空间机器人系统动力学方程.基于奇异设动理论将系统动力学方程分解为快变子系统和慢变子系统,针对快变子系统采用了速度差值反馈控制方案,针对慢变子系统设计了基于径向基神经网络的全阶滑模控制方案.从仿真结果可以看出,所提控制方案对柔性振动主动抑制效果明显,既保留了传统滑模控制方案的鲁棒性,又克服了其存在的抖振问题.
