多态自动对靶风送式喷雾试验台的设计与试验
2019-10-25刘理民张晓辉石光智
刘理民 张晓辉 石光智


摘要:针对果园喷雾存在的药液沉积量低、农药浪费及环境污染等问题,拟设计1种集传感器探测技术、电子信息技术和风送式喷雾技术于一体的多态自动对靶喷雾试验台。该试验台主要由机架、风送系统、探测及其控制决策系统、药液管路系统和组合喷头喷洒执行机构等组成。对关键部件进行设计仿真,以获得最佳设计方案;设计控制多组合喷头的控制决策算法,实现多态自动对靶喷雾;进行喷雾性能的对比试验。结果表明,设计的多态自动对靶喷雾试验台,可以实现对不同冠层宽度靶标的多状态喷雾,作业效果良好,雾滴沉积量比普通风送式喷雾提高了34.07%,变异系数降低了25.60%;多态自动对靶风送喷雾相较于普通风送式喷雾的綜合省药率大于20%,从而提高了农药的利用率,降低了农药残留量。
关键词:组合喷头;果园;多态喷雾;多态对靶决策
中图分类号: S491 文献标志码: A 文章编号:1002-1302(2019)13-0260-04
目前,果园植保作业仍以化学防治为主,该方法防治简便,效果明显,经济可靠,在果园水果保收、增收方面有着不可替代的地位[1]。但是,人工喷施及常规的机械喷雾有着较大缺陷:只有小部分药量能够沉积到果树冠层上,大部分农药沉积到地面,飘逸到周围环境中,造成土壤、水体污染;农药残留严重,影响果品品质[2-5]。20世纪80年代,我国引入风送式喷雾技术,利用风机风力提高了药液的穿透能力、沉积量及果园病虫害防治效果[1-2],但是不足之处是只能按照设定的参数进行连续喷雾,不能根据果树冠层的实际参数调节喷量[4-8]。在幼小及稀疏果园中,连续喷雾会造成果树间隙无效喷雾、大量药液沉积到地面、浪费农药及环境污染等问题[7-10]。
本研究结合传感器、电子控制等现代新技术与传统的风送式喷雾技术,拟设计1种多喷头组合的多态自动对靶风送式喷雾试验台,简述其工作原理,提出并设计控制多组合喷头的控制部件;进行多喷头组合的喷量、雾滴沉积量及多态自动对靶喷雾等试验。采用决策算法,对其中关键部件进行设计仿真,以获得最优设计部件;进行多喷头组合的喷量、雾滴沉积量及多态自动对靶喷雾等试验。
1 整机结构及工作原理
1.1 整机结构
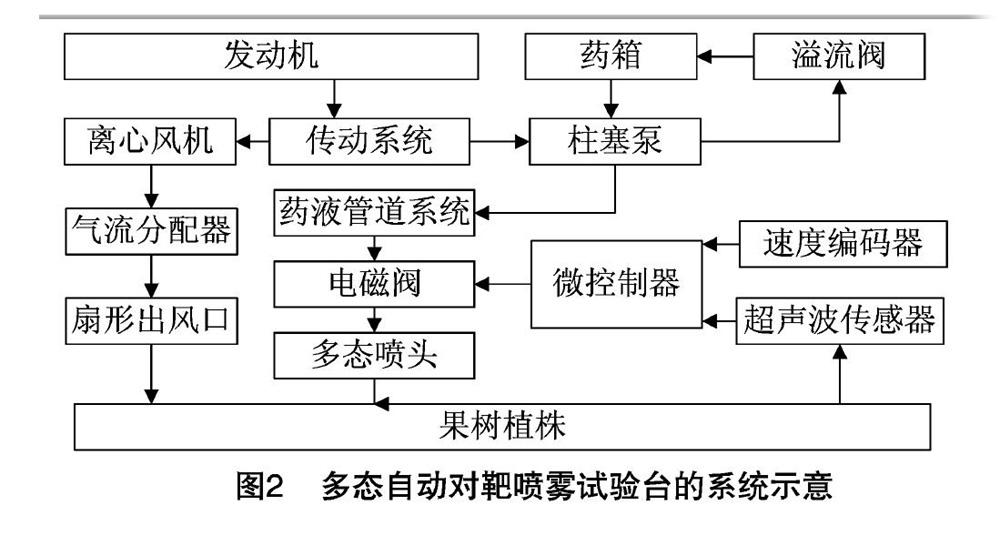
多态自动对靶喷雾试验台由机架、风送系统、探测控制系统、药液管路系统和多态组合喷头等组成(图1)。多态自动对靶喷雾试验台的系统示意见图2。
主要技术参数如下:整机尺寸为1 900 mm×980 mm×1 150 mm;配套动力为5~10 kW;药箱容积 ≥200 L;药泵流量为0~6 L/min;风机风量≥2 000 m3/h;工作幅宽≤6 m;喷药作业速度为1.5~3.6 km/h;农药有效利用率≥30%。
1.2 试验台的工作原理
机具作业时,应根据实际果园的果树行间距,设定果树行距及传感器的探测距离阈值,防止出现隔行喷雾。机具在果园行驶时(机具应行驶在果树行中间),超声波传感器不断扫描检测左右两侧的果树冠层边界,将果树冠层边界与传感器的距离、速度编码器探测机具行驶的实时速度、管路压力传感器探测的压力值等实时传输给微处理器核心数据处理单元,制定喷雾决策,从而进行多态喷雾判断。
在系统反应时间内,若传感器在设定阈值内没有检测到植株冠层,则不喷雾;若检测到植株冠层,则进行多态喷雾判断,并控制相应电磁阀动作,实现多态喷雾。
2 风送系统及多态喷头的设计
2.1 风送系统的设计
2.1.1 风量的计算 多态自动对靶喷雾风送系统采用置换原则和末速度原则来计算喷雾风量。为了扰动枝叶以提高药液的穿透性,设计的喷雾机风量应大于置换空间的空气量,如下式所示:
式中:Q为风机风量,m3;V为喷雾机速度,0.3~0.7 m/s;h为风机出风口直径,取700 mm;H为果树高低树冠之间的距离,取1 500~2 000 mm;L为喷头至果树的距离,取400~600 mm;K为气流衰减和沿途损失确定的系数,一般为1.1~1.2。
2.1.2 分配器的设计 气流分配器(图3)可以将离心风机产生的气流均匀地分配给左右两侧多个扇形出风口,可以对多喷头组合所喷出的药液进行二次雾化并胁迫吹向植株。对设计的半圆柱式气流分配器的6个圆柱形出风口进行流体(fluent)仿真,如图4所示,半圆柱式分配器腔内外压差稳定,可以提供稳定的气流,而在稳定气流胁迫雾滴运动至目标冠层的过程中,保持雾滴均匀分布,使雾滴在植株冠层沉积均匀。
2.2 药液管路系统及多态喷头的设计
多喷头组合采用上下竖直的3个喷头,应使3个组合的喷头实现全喷、2个喷头喷雾(中间位置的喷头不喷)、1个喷头喷雾(中间位置的喷头喷)、不喷4种喷雾状态,故称多态。依据上述4种喷雾状态,确定3个竖直喷雾喷头的喷雾角度α(3个扇形喷头的规格相同)及安装间距k,其中超声波传感器的两两间距H为45 cm,试验台距离冠层轮廓边缘的最近距离L为40 cm。
由上式求得:k≥15 cm,α≥58.72°。考虑到扇形喷头系列,选择扇形喷头角度为80°,流量为0.8 L/min,k取15 cm,即3个多态组合喷头的安装间距为15 cm。
3 硬件设计及控制决策
3.1 硬件设计
本研究中的距离探测传感器选用抗干扰能力强、耐污性强、不易受外界环境影响的NU112F30TR-1MD型超声波传感器,其发射频率为112 kHz,发射角度为15°,工作盲区为 20 cm,工作电压为12~24 V(直流电),输出模拟电压信号为0~5 V(直流电)。
本研究选择的增量式正交旋转编码器型号为E6B2-CWZ6C,分辨率为2 000P/R(指每圈输出2 000个脉冲),电源电压(DC,直流)为5~24 V(集电极开路输出型),输出增量式位置信息,可与STM32F10x系列MCU直接连接。在短时间内,用旋转编码器计算车体的实际速度,如式(5)所示:
