基于粒子滤波算法修正节点队列模型
2019-09-21邱智慧
邱智慧
(中国民航大学电子信息与自动化学院,天津 300300)
民航空中交通运行区域可分为航路、终端区及机场等三个部分,其中终端区是航路起始、终止的必经区域,也是整个空域系统运行过程中的瓶颈区域[1]。由于终端区的空域容量有限,进近飞机数量多,因此如何有效地实现飞机进近排序是终端区交通流量控制的重要任务。
针对终端区飞机进近排序问题,国内外学者提出了很多创新性方案。来自NASA的艾姆斯研究中心的Gregory C. Carr等人为了不改变飞机顺序实现终端区飞机进近排序,提出了时间提前(TimeAdvance,TA)算法[2],通过提前首架飞机的到达时间来解决后续飞机的延误时间。该算法要求在飞机队列中必须有两架飞机满足最小时间间隔约束条件,若无满足条件的飞机,该算法将不能适用。我国的刘洪等人提出了一种针对动态飞机流的优化调度算法[3]。该算法结合了各种空管限制条件,引入飞机的优先级,并通过实验验证了该算法的可行性,但是实现管制限定条件的获取上具有一定难度。
针对上述问题,本文提出利用节点队列模型得到多条飞机的下降路径,并通过粒子滤波算法修正节点队列模型的相关参数得到飞机的延误时间,通过比对不同路径的延误时间得到时间较小的飞行路径。实验结果表明,采用节点队列模型可以准确得到飞机的下降路径,通过粒子滤波算法可以估计出进近飞机的延误时间,是一种有效的分析终端区流量控制的工具。
1 研究与方法
1.1 节点队列模型定义和构建
本文主要研究飞机多条路径进近过程中节点队列模型的构建。图1所示为飞机到达终端区进近的空域结构图[4],飞机从起始进近定位点(Initial approach fix,IAF)开始经由中间进近定位点(Intermediate approach fix,IF),直到最后进近定位点(Final approach fix,FAF)实施着陆,通常飞机在下降进近过程中需要经历终端区内规定的若干路径点,当经过的路径点间隔与标准进近间隔相等时,路径点与飞机重叠,飞机经历的路径点集合构成的下降节点队列(即下降路径)可等效为节点队列模型。

图1 终端区飞机进近的空间结构
飞机在终端区运行时,路径点间距离通常是非等间隔且具有多条路径,因此利用公式(1)计算得出((xij,yij)表示路径点Sij的坐标)路径点间间隔,再将路径点距离离散分割成标准进近间隔进行分析。若飞机在下一路径点产生冲突,则应在当前路径点进行转移,且应保障在距离FAF前5海里处完成飞机航路的转移。如图2所示,为保障飞机安全着陆,应在服务单元SN之前调整飞机状态使之对正下降着陆航段。巡航飞机通过不同航路及高度层路径到达目的机场终端区,且均通过服务单元S11开始实施进近着陆,经过S12至SN点到着陆形成一条下降路径,当一条路径无法满足飞机进行着陆时,就会转移到Sij,i=2~M路径点上,形成M条路径。其中Sij表示服务单元(i=1~M,j=1~N),M表示飞机下降所形成的路径数目,N为终端区飞机制定飞行计划时所经历的路径点中除FAF外的其他路径点数目,相邻服务单元间的距离为3海里。
(i=1~M,j=1~N-1)
(1)

图2 终端区队列模型中队列状态
飞机的运动状态由下一节点的忙闲状态决定,Cij=1表示服务单元空闲,可以接受新服务,飞机可以进入该服务单元接受服务,飞机状态表示为Aij;Cij=0表示服务单元繁忙,不可以接受新服务,此时飞机不可以进入服务单元,需实施路径转移,飞机状态表示为Aij′。
根据上述方法,可以得到多条航迹上飞机的转移状态,当一架飞机到达时(A表示一架飞机的状态):
所有服务单元状态Cij=1(i=1~M,j=1~N-1),则该架飞机可以实施从服务单元S11到S1N进近着陆。飞机状态表达式
[AS11→S12,AS12→S13,…,AS1(N-1)→SN,ASN→SFAF]
服务单元状态CN=1, C1(N-1)=0,Cij=1(i=1~M,j=1~N-2),则该架飞机从服务单元S11实施进近着陆,在S1(N-2)处进行转移。飞机状态表达式为
服务单元状态CN=1,C1(N-2)=0,Cij=0(i=1~M,j=1~N-3),则该架飞机从服务单元S11实施进近着陆,在S1(N-3)处进行转移。飞机状态表达式为
以此类推,可以得到当C11=C12=1、Cij=0(i=1~M,j=3~N-1),则该架飞机从转移S11到S12便不再继续实施进近着陆,需转移到其他路径点上。飞机状态表达式为
C11=1,C1j=0,Cij=1(i=2~M,j=1~N-1),则该架飞机进入S11后便不能再实施进近着陆,需进行转移到其他路径点上。飞机状态表达式为
服务单元状态C1j=0,Cij=1(i=2~M,j=1~N-1),则该架飞机不能实施从服务单元S11进近着陆,需从其他路径点直接实施着陆。飞机状态表达式为
[ASi1→Si2,ASi2→Si3,…,ASi(N-1)→SN,ASN→SFAF]
当有两架飞机达到终端区时,仍按照上述方法实施进近(令A表示第1架飞机的状态、B表示第2架飞机的状态)。
所有服务单元状态Cij=1(i=1~M,j=1~N-1),且CN=1则两飞机可以实施从服务单元S11到S1N进近着陆,但是为了不产生冲突,第2架飞机需在SN-1处转移,形成两条航迹。飞机状态表达式为
服务单元状态CN=1,C1N-1=0,其他Cij=1则两架飞机从服务单元S11到S1N-2后便需要转移,从而形成3条路径。飞机状态表达式为
以此类推可得,当CN=1,C11=C12=1、Cij=0(i=1~M,j=3-N-1),则两架飞机从转移S11到S12便不再继续实施进近着陆,需转移到其他路径点上,从而形成3条路径。飞机状态表达式为
服务单元状态CN=1,C11=1,C1j=0,Cij=1(i=2~M,j=1~N-1),则两架飞机进入S11后便不能再实施进近着陆,需进行转移到其他路径点上,从而形成3条路径。飞机状态表达式为
所有服务单元状态CN=1,C1j=0,Cij=1(i=2~M,j=1~N-1),则两架飞机不能实施从服务单元S11进近着陆,需从其他路径点直接实施着陆。飞机状态表达式为:
上述为两架飞机的转移状态,以此类推可以得到多架飞机达到终端区的转移状态和队列结构。
1.2 节点队列模型参数估计
由于节点队列模型中参数是非线性、非高斯分布的[5-6],飞机的到达时间分布和服务时间分布都是大于零,其次,这些分布不是高斯线性分布,通常服从Poisson、Erlang分布描述。因此需要考虑更先进的技术,选择可适用于节点队列模型的算法,所以本文采用粒子滤波算法实现对模型参数的估计[7-8],粒子滤波算法和扩展卡尔曼相比可以不依赖于任何局部的线性化技术,也不使用任何非线性函数近似逼近方法,它是通过有限数量的状态样本(粒子云)来近似后验概率,每个样本可大致对应于状态空间中的区域,其精度可以逼近最优估计。
典型的队列分析需要计算出交通流量参数,例如延误时间(等待的时间),并且给出交通流量指标和服务时间的分布状态,其中交通流量指标和服务时间可以通过测量实时数据来得到,而延误时间是可以预测得到的,预测延误时间是需要通过测量系统来划分服务时间和延误时间。
每次服务的服务时间表示为:

(2)
式中:s代表服务的长度,在本文中为由若干3海里的区间组成的路径点之间的距离;V(s)代表沿着路径长度的空速参数;L代表从起始进近定位点到最终进近定位的直径距离。
时间延迟估计模型为:
a(t2)=a(t1)+wap(t1)*ΔT
(3)
x1(t2)=x1(t1)+x2(t2)*ΔT+1/2*ΔT*wtp(t1)
(4)
x2(t2)=x2(t1)+ΔTwtp(t1)
(5)
y1(t2)=x1(t2)+tSVC(t2)+ws(t2)
(6)
式中:x1、x2为延误时间,wap(t1)是变化的空速斜率的噪声;wtp(t1)是延误时间的噪声;ws(t2)是传感器噪声;ɑ(t)为沿着路径的空速斜率,可以由飞机中的空速仪表盘来获得。采样时间:ΔT=t2-t1。其中tsvc(t2)可表示为:

(7)
式中:Ventry为飞机在终端区的出场空速,在上述粒子滤波算法中,飞机需保持匀速实施进近,但是飞机在终端区运行时,速度是匀减速变化的,因此需对上式中tsvc进行修正,代入飞机空速变化参数,进行分析。
飞机在终端区实施进近着陆时,飞机的空速不是一个定值,而是不断变化的,因此可以引入空速变化斜率来修正粒子滤波方程的测量方程,从而使得观测结果更加准确。假设空速的变化是沿着路径线性变化的:V(s)=as+b,上式的积分可以表示为
tsvc=1/a*ln(a/b*L+1)
(8)
式中:ɑ为沿着路径的空速斜率;b为进入终端区时的入场速度。由此可得修正后的粒子滤波算法方程为:
x1(t2)=x1(t1)+x2(t2)*ΔT+1/2*ΔT*wtp(t1)
(9)
x2(t2)=x2(t1)+ΔTwtp(t1)
(10)
y1(t2)=x1(t2)+tsvc(t2)+ws(t2)
(11)

(12)
式中:Ventry为服务的出场空速。由此可以得到代入空速加速度后的粒子滤波算法,从而实现延误时间的预测。
2 结果与分析
2.1 路径仿真分析
为了构建节点队列模型,需在终端区提取路径点信息(经度、纬度)并表示在坐标系中,根据每个路径点相关的纬度和经度坐标,使用公式(13)和(14),将路径点的经纬度信息转换为笛卡尔坐标表示出来。
x=Re·λ节点-Re·λ目的机场=Re·Δλ
(13)
y=Re·cosλ目的机场·(τ节点-τ目的机场)
(14)
式中:Re为地球半径;τ和λ分别表示路径点的经纬度信息。由此,以美国旧金山终端区路径信息为例,利用公式(13)和公式(14)就可以将路径点表示在坐标系中。可以得到图3所示的旧金山终端区下划线上的16个路径点。 从不同方向进入终端区的飞机,可选择不同方向上的IAF点实施着陆,最后达到FAF点。

图3 旧金山终端区着陆路径点
对于终端区路径点间距离为非标准进近的间距时,需要将相邻路径点间距离划分成标准进近距离,得到飞机的排队队列,由此得到图4中的飞机节点队列,且相邻节点间仅能容纳一架飞机。得到图5所示的旧金山飞机着陆路径信息,由该图可以看出共形成5条下降路径。接下来在此基础上利用粒子滤波算法对延误时间进行预测分析。
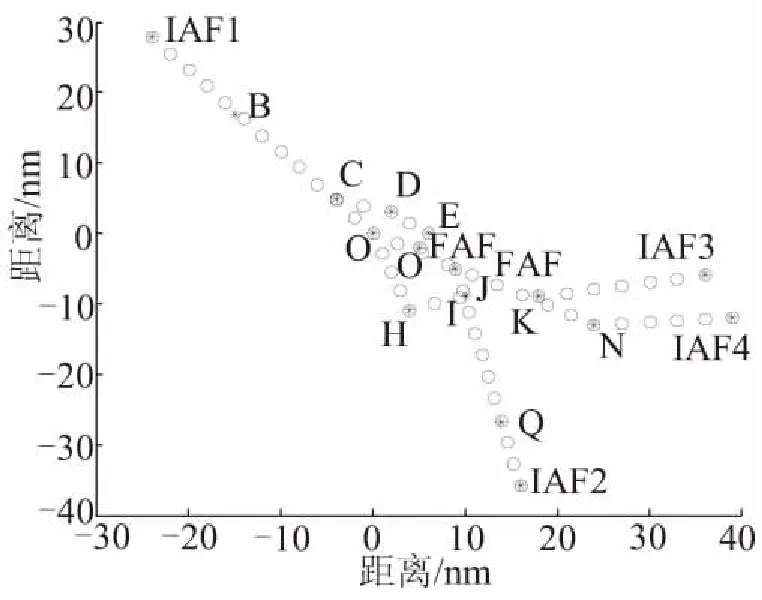
图4 以3海里划分的路径结构
2.2 节点队列模型参数仿真分析
以图5中旧金山机场节点队列模型所得的5条路径为基础,假设飞机达到终端区后保持230 km/h的速度匀速着陆,通过粒子滤波算法在采样100次的条件下,得到5条路径的延迟时间,如图6所示,从图中可以看出路径3和路径4的延迟时间相对其他路径较小,波动幅度也是最小的,最适合飞机实现进近着陆。

图5 旧金山机场飞机着陆路径

图6 粒子滤波算法得到5条路径延误时间
将5条路径所得的仿真时间与真实时间进行比对,得到仿真时间的误差,图7所示为典型路径的误差时间。
由图7可以看出路径1延误时间误差较大,路径4的时间均方误差小,因此综合考虑路径4为最优路径。综合所述,到达终端区的飞机选取路径4进行着陆更优。
仍以旧金山机场节点队列模型所得的5条路径为基础,假设飞机达到终端区后以250 km/h的速度实施匀减速着陆,得到图8所示的5条路径的延误时间,从图中可以看出路径1的延误时间最小,波动幅度也是最小的,最适合飞机实现进近着陆。
通过以图6和图8做对比可以看出,引入空速斜率后的粒子滤波算法准确值更高,极大地缩短了延误时间,若到达机场飞机采用该算法实现进近着陆,将会极大的减少终端区的延误现象,使得终端区空域充分利用。

图7 2条典型路径的延误时间均方误差

图8 引入空速斜率粒子滤波的延误时间
将扩展卡尔曼滤波算法和粒子滤波算法所测得的实验结果进行对比,得到图9的实验结果对比图。
由图9可以看出,飞机在相同条件的情况下,并以相同的速度和加速度通过同一条路径时,运用粒子滤波算法所测得的延误时间更短,因此,粒子滤波算法对节点队列模型的参数估计性能要比扩展卡尔曼滤波算法的更优。

图9 不同算法实验结果对比
3 结论
(1)依据终端区的路径点信息,若路径点间距离为非标准进近间隔,需将路径点间距离划分成每3海里一个节点的形式,再根据相邻节点间只能容纳一架飞机的限定条件,得到飞机的进近路径。
(2)通过粒子滤波算法预测模型参数得到飞机匀速状态下队列中的延误时间分布状态,通过对比不同路径的延误时间得到最优的下降路径。
(3)通过粒子滤波算法预测模型参数得到飞机变速状态下队列中的延误时间分布状态,通过对比匀速和变速所测得的延误时间,可以看出飞机在变速情况下延误时间更短,效果更好,在不发生冲突和飞机排序的情况下,使得节点队列模型飞机数量达到最优化,增大终端区的吞吐量。
(4)通过将扩展卡尔曼滤波算法所得的延误时间和粒子滤波算法所测的结果进行对比,可以得到粒子滤波算法对于实现节点队列模型延误时间的估计效果更好。
