基于仿人智能的油田地层注水系统控制策略探讨
2019-08-17杨张利
杨张利
(重庆电子工程职业学院, 重庆 401331)
注水驱油是维持油田长期高产、稳产的有效方法。油田地面注水就是在采油活动中借助注入一些驱替介质使油层产生一定压力,即补充地层能量保持油层压力以利开采。作为驱替介质的水,易于获得,且与石油不兼容,密度大于油的密度,能直接将底层的原油驱替到生产井内,即利用水可使原油移动到适合开采的地方以提高开采效率[1-4]。基于我国贫油田较多,目前国内以水驱油方式开采的原油产量保持在总产量的80%以上,因此在油田开发全周期的不同阶段都采用注水方式以水驱油,综合注采率和经济效益相对较高。油田地面注水系统是一个复杂的系统工程,注水井口与注水泵站均可与注水管网相联结,形成“网状”的结构,基于注水管网与注水工艺的优化,可对注水系统进行节能改造和优化控制[5-7]。由于历史和技术等原因,注水系统效率不高,常处于“大马拉小车”状态运行,造成电能的极大浪费。此外,控制手段落后,有的注水压力甚至采用水泵出口闸门手动控制,水泵与电机特性不匹配,很难在最佳工况点运行[5-10]。为此,结合工程实践,本文对油田注水节能控制系统的控制策略进行探讨。
1 控制目标与系统结构
1.1 控制目标
油田地层注水系统要解决的问题:一是尽可能最大限度地节能,二是维持注水压力的恒压控制。因此,系统控制的目标可简单概括为:在满足注水工艺要求的前提下,维持油田地层注水系统的注水压力恒定并最大限度地节约电能。
1.2 系统结构
满足注水系统控制目标的控制系统结构框如图1所示。
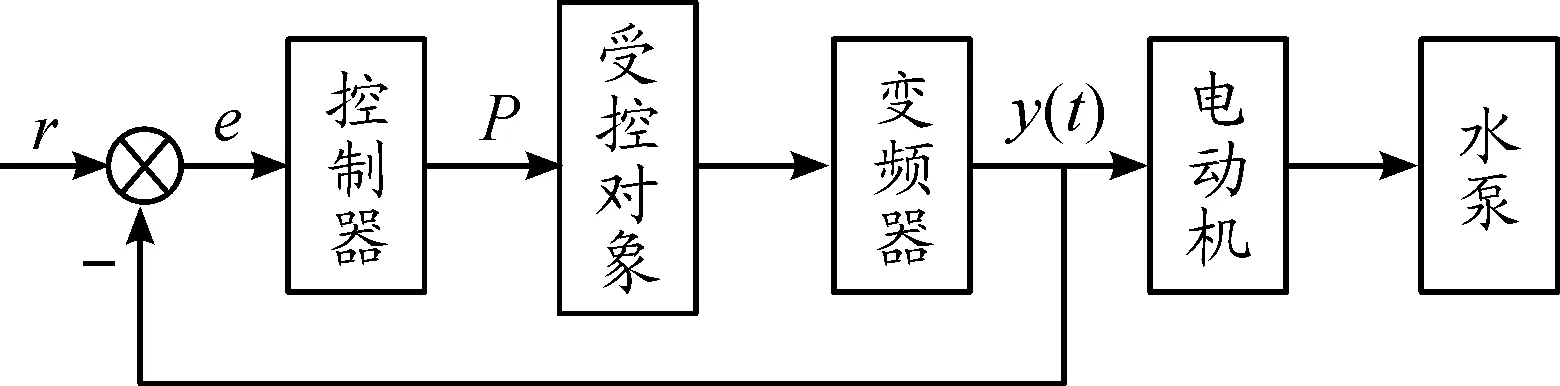
图1 油田注水控制系统结构
图1中:r、y分别为控制系统的输入和输出;P为控制器输出;e=y-r,表示系统误差。传动装置采用变频器直接驱动电动机运行,以改变水流量并维持水压恒定。变频器用于调节电动机转速以有效地降低系统的电能损耗。图1注水系统的控制结构有如下特点:
① 电动机可通过变频器或软起动从0~50 Hz作缓慢的加速起动,以减少电动机直接起动(避免起动电流大导致对电网的冲击和机泵因突然高速起动带来的负面效应),因此该系统结构有利于电动机实现系统的软起动和自由停车。
② 便于实现电动机功率与实际负荷相匹配,改善电动机的电源质量,提高系统的功率因数,确保注水系统的节能运行。
③ 机泵的平稳运行可消除泵的喘振现象,确保机泵运行始终处于期望的最佳工况状态。
④ 便于实现注水系统压力的自动跟踪控制,增强系统的稳定性和可靠性,确保被调节量可实现更平稳的调节。
⑤ 控制器选择灵活性大,有利于控制策略与系统控制论特性匹配的实现。
2 控制论特性、控制策略与控制算法
2.1 注水过程的控制论特性
被注水地层的地质结构复杂,与之相应的水路管网结构也较为复杂,涉及众多不确定性因素,人们对其了解程度近似一个黑箱。但从控制论特性分析可知,注水过程表现出以下特性[11]:注水过程中受众多不确定性因素影响,系统参数具有随机性、未知性和时变性;注水系统具有时滞特性,时滞因不确定性因素所致,同样具有未知性和时变性;注水系统是惯性系统和复杂系统,变量众多,其变量间存在着复杂的关联性;野外油田环境存在干扰的不确定性、随机性、多样性和未知性。特别在后期开发中,地质情况变化较大,注水井增多,必然会发生水路管网结构和开并井数的增减变化以及洗井与供水不足,造成注水量难以达到均匀和稳定,导致经常引起注水压力波动。上述特性表明,油田注水过程中充满了不确定性和复杂性,采用传统方法难于建立数学模型,基于范式控制的传统控制策略与控制算法(如PID、最优控制、自适应控制算法等)是无济于事与无能为力的,采用传统控制策略难以对注水过程实施有效的优化控制,因此有必要寻求与注水过程控制论特性相匹配的新控制策略与控制算法。
2.2 控制策略选取
地层注水系统的控制目标是在满足注水工艺的前提下最大限度地节约电能并维持对地层的恒压注水。显然,最大限度地节约电能属于成本控制问题,涉及直接驱动级的执行策略选取;维持对地层的恒压注水属于对注水过程的控制策略,该过程是一个信息处理过程,其信息处理过程本身几乎不消耗能量,却是实现节能恒压注水的关键所在[12-13]。
2.2.1控制策略
综上,基于数学描述的范式传统控制策略是不可取的,因此只能选取智能控制策略。可供选择的控制策略有神经网络控制、模糊控制等,无需建立数学模型就可实施控制,但均有其应用范围,须针对特定范围和领域才能充分发挥其控制优势,并非万能。比如,神经网络或模糊神经网络控制由于不确定性造成学习样本难以提供,导致不可能进行网络连接权值训练,因此难以应用。又如,由于不确定性,模糊控制及其变形策略因隶属度函数无法确定造成控制规则无法确定,最终导致其不可能用于实施控制[14-15]。其中值得关注的是仿人智能控制HSIC(human simulated intelligent controller)策略[16],因其更贴近现实工程实践显得特别可取。该策略总结人的控制经验,模仿人的控制行为,只要注水过程偏离期望注水状态就可以产生式规则描述注水过程的运动状态,借助直觉推理,模仿控制专家的控制行为,构造出与注水过程控制匹配的控制算法,从而协调注水过程中快速性与平滑性、鲁棒性与精确性等控制品质指标。鉴于该策略可方便地将现场操作者及控制专家的控制技巧、控制经验与控制智慧巧妙地嵌入到控制算法中,因此本文在注水过程中采用基于仿人智能的融合控制策略。
2.2.2控制执行策略
电机转速公式为:
n=60·f·(1-s)/p
式中:p为电动机的极对数;f为供电电源频率;s是转差率;n是电动机的实际转速。由电机转速公式可见,n∝f,即改变f可平滑地调节电动机的实际转速n。地层注水系统的水泵属平方转矩负载,其电动机轴功率P、地层注水流量Q、地层注水压力H与电动机转速n之间具有如下关系:P∝n3,Q∝n,H∝n2,也就是说电动机轴功率与转速立方成正比,地层注水流量与转速成正比,地层注水压力与转速平方成正比。因此,改变电动机转速n就可实现恒压供水对注水流量的控制。变频调速不仅节能效果明显而且调节方便,设电动机额定转速为nN,额定功率为PN,若实际输出功率为P时的实际转速为n,那么采用功率表示的节能效果可以表示为
(1)
式中:如取n/nN=2/3,则ΔP=0.67PN,也就是说在理想情况下,其节能控制效果可达67%,可见节能效果相当显著。
2.3 控制算法
(2)
上述算法中,KP为比例系数,k为抑制系数,P为控制器输出,em, j表示系统误差最大值的第j次峰值。
基于上述HSIC基本控制算法,结合现场实践,将控制专家与操作者的控制知识、控制技巧、控制经验与控制智慧巧妙地嵌入到控制算法中[17],对不确定性注水过程采用基于仿人智能的融合控制策略,其控制规则概括于表1。该控制规则完整地描述了注水过程状态在信息空间中的运动轨迹,既反映了过程的所有动态信息,又反映了控制作用对过程的影响。表1中,KP为比例增益;K1为增益放大系数,K1> 1;K2为抑制系数,0
表1 控制规则
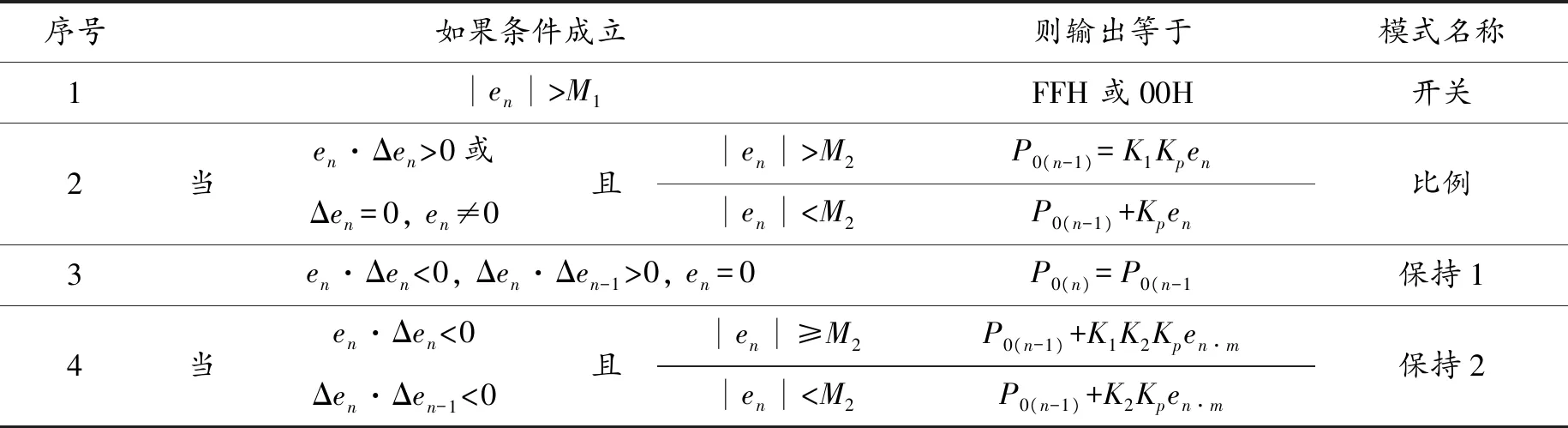
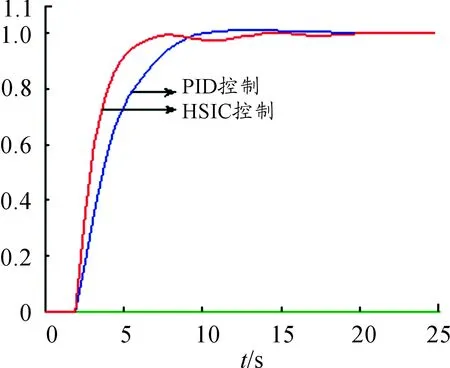
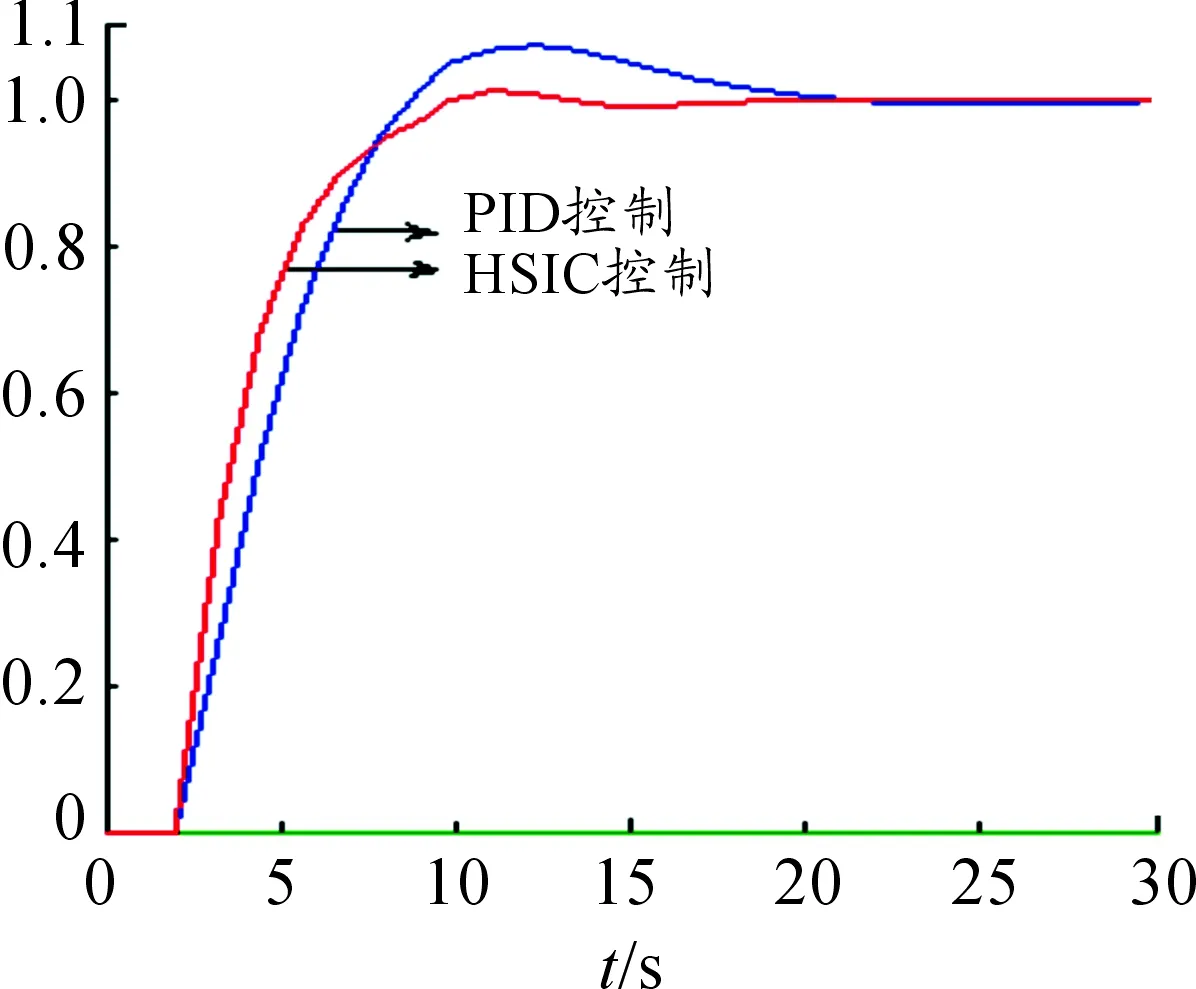
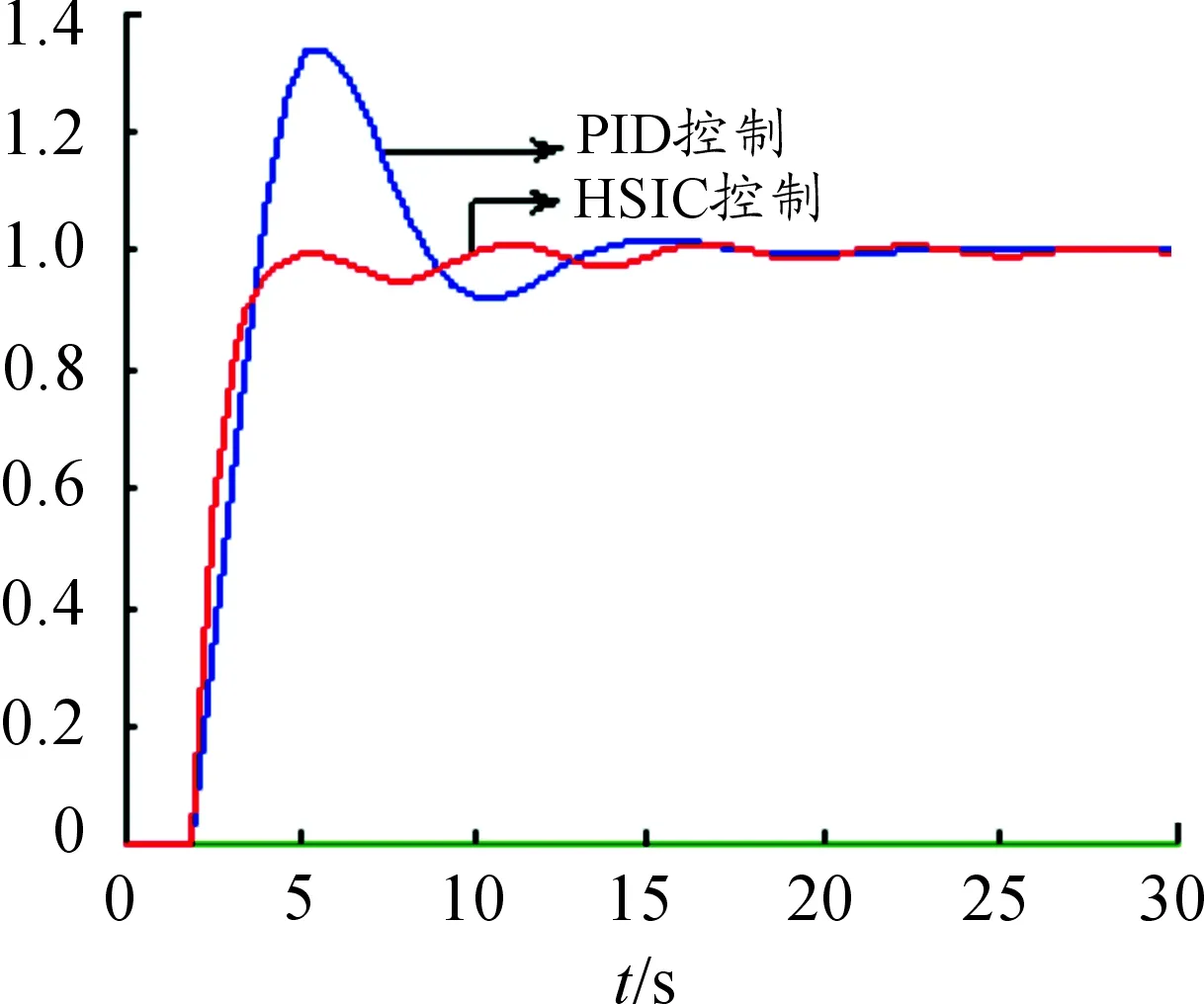
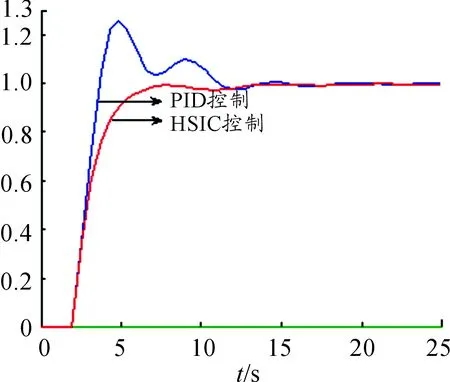
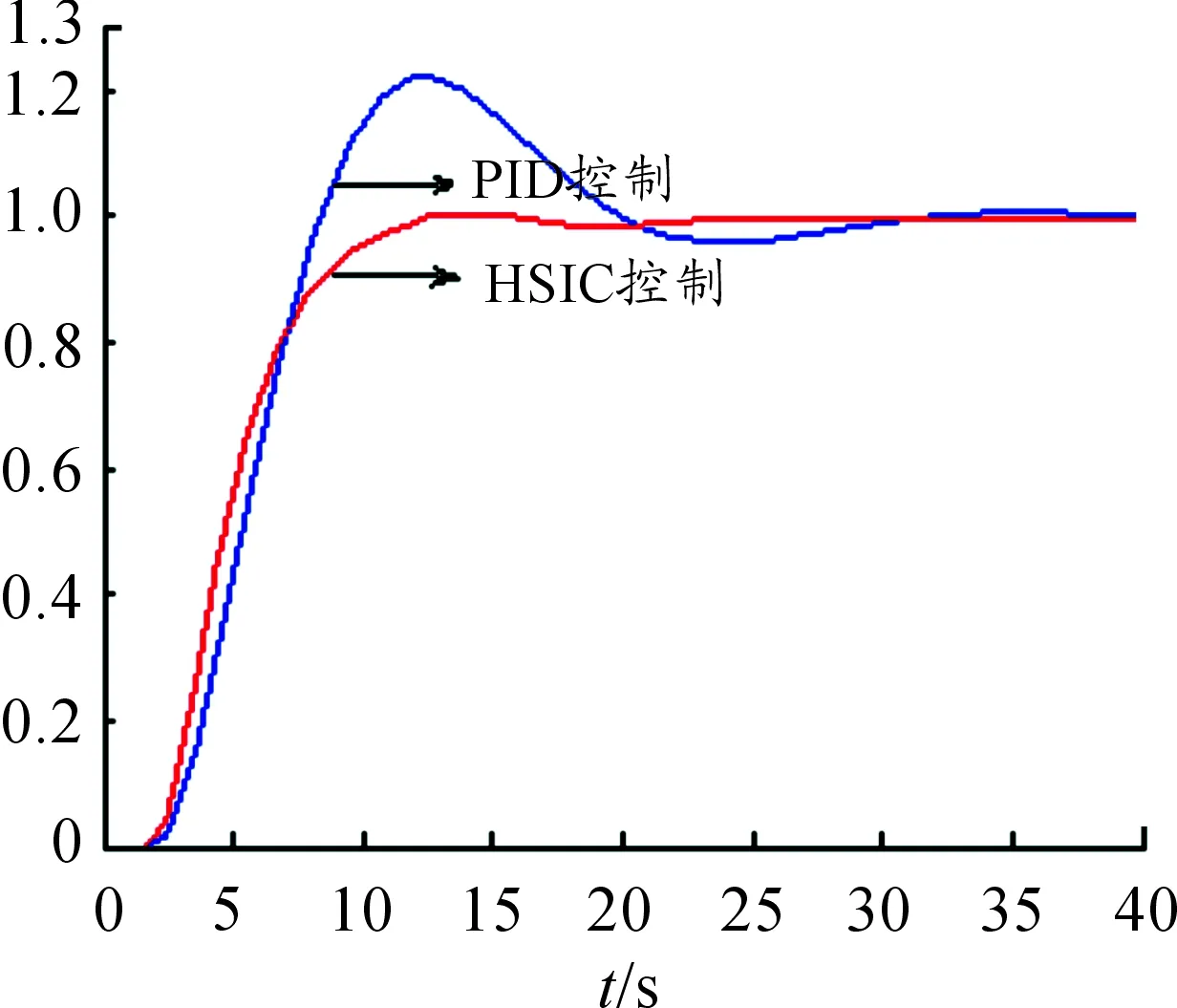
序号如果条件成立则输出等于模式名称1︱en︱>M1FFH 或00H开关2当en·Δen>0或Δen=0, en≠0且︱en︱>M2︱en︱ 针对注水过程的控制论特性(如过程参数的不确定性,过程变量间的关联性、未知性以及时变性等),由于其难以数学建模,因此实验仿真中只能采用等效的方法假定数学模型,以改变模型控制参数的方法模拟注水过程控制论特性的变化,从而考察控制策略的优劣。其中,最好的方法就是考察控制算法的鲁棒性,如果控制算法鲁棒性很强,那么这种控制策略无疑是可取的,因为当注水过程参数发生变化时其控制效果并不受参数变化的影响,仍然可以获得良好的控制品质。针对注水过程兼具惯性、时滞等特性,可将其近似为一个1阶惯性环节加纯时滞的模型,为此,将注水过程数学模型假设为 W(S)=Ke-τs/ (Ts+1) 模型中:T为过程的时间常数;τ为纯滞后时间;K为增益系数。 实验仿真基于Matlab环境,利用Simulink工具箱搭建系统仿真模型,在单位阶跃输入信号作用下,分别采用PID和HSIC算法控制同一被控过程,然后考察注水过程的单位阶跃响应,以此判定HSIC算法是否具有很强的鲁棒性。为了方便实验仿真结果对比,本文给出了过程参数改变时不同算法控制的单位阶跃响应对比曲线。当K=1,τ= 2和T=1.2时,实验仿真对比曲线如图2所示;当K=2,τ=2和T=1.2时,实验仿真对比曲线如图3所示; 当K=1,τ= 4和T=1.2时,实验仿真对比曲线如图4所示;当K=10,τ= 2和T=1.2时,实验仿真对比曲线如图5所示;当传递函数由W(S)=Ke-τs/(Ts+1)变成W(S)=Ke-τs/(Ts+1)( 2s+1)时,实验仿真对比曲线如图6所示。 图2 过程响应比较 图3 T改变的响应比较 图4 τ改变的响应比较 图5 K改变的响应比较 图6 二阶过程的响应比较 从图2可以看出,在上升时间与调整时间方面, HSIC控制快于PID控制,HSIC控制策略有更好的控制品质。图3显示,T改变时,HSIC控制响应几乎没有变化,但PID控制产生较大的超调。从图4可以看出,τ改变时,HSIC控制仅在响应时间上向后推迟了2 s,其响应几乎没有发生变化,但PID控制产生了大幅度的超调。图5显示,HSIC控制仍保持无超调且控制响应平稳,几乎没有发生变化,但PID控制不仅有严重的超调量产生,而且还产生震荡。从图6可以看出,在原传递函数基础上增加一个惯性环节1/(2s+1),即由1阶过程变为2阶过程时,HSIC控制无超调量出现,控制效果平稳,其响应曲线几乎没有发生变化,但PID控制产生了严重超调。 上述鲁棒性实验表明:与PID控制相比,基于HSIC的控制具有很强的鲁棒性,当过程参数变化甚至由1阶过程变为2阶过程时,HSIC控制的响应几乎没有发生变化,都能获得良好的控制品质,取得了令人满意的控制效果。因此,对注水过程控制而言,HSIC控制策略是合理、可行和可取的。 油田开发是一个复杂的系统工程,现场工作环境复杂,而油田地层注水本身就是一个具有不确定性的复杂系统。为了在满足注水工艺要求的前提下,实现维持油田地层注水系统的注水压力恒定并最大限度地节约电能的控制目标,研究与地层注水过程控制论特性相匹配的控制策略十分重要。文中基于仿人智能的实验仿真结果表明,采用智能融合控制策略对注水过程实施控制是可行的。3 实验仿真及结果分析
3.1 实验仿真
3.2 仿真实验的结果分析
4 结束语
