两路信号控制的液滴单向运输数字微流控芯片*
2019-08-14盛文洁王续博
盛文洁, 王续博, 周 嘉
(复旦大学 微电子学院 专用集成电路与系统国家重点实验室,上海 200433)
0 引 言
芯片实验室(lab on a chip, LoC)在探索生命科学和疾病检测及监测中起着越来越重要的作用,其中微流技术是LoC的核心。数字微流(digital microfluidics, DMF)技术对离散液滴进行独立控制,具有样品消耗量小、分析速度快、自动化程度高、节能,及易与其他系统整合等优势[1, 2]。其中基于介质上的电润湿(electrowetting-on-dielectric, EWOD)原理的数字微流体技术是一种最为成熟和有前途的数字微流体技术,具有电控、可逆和操作灵活性高及电学集成LoC的优点,可广泛应用于化学、医药、生物等领域,如样品准备、细胞培养、聚合酶链式反应(polymerase chain reaction,PCR)、产物检测、单细胞分析等[3]。
EWOD技术通过电极输入电压信号,利用电场改变液体和介电层之间界面张力,对极少量液体进行液滴产生、分离、运输、混合的操控[4]。其中,液滴运输是最基本的操控,也是多数应用中所需要的主要功能。通常每个电极需要单独控制。随着电极数量的增加,则需要更多的控制信号,芯片设计复杂程度显著增加。为解决这个问题,已有相关文献报道了解决的途径。如:将上下极板的条形电极正交组合构成交叉电极[5],控制信号由M×N减少到M+N;或采用薄膜晶体管(thin film transistor,TFT)和印刷电路板(printed circuit board,PCB)技术进行多层布线实现二维平面上的大规模液滴控制[6],而TFT技术需要定制,PCB技术则尺寸较大,同时芯片表面平整度受到影响[7, 8],限制了应用。
很多应用需要在一维路径上对多个液滴进行运输,因此优化电极结构设计,提高电极复用效率,能够大大降低EWOD芯片的复杂度,减少大规模EWOD芯片对多层布线的依赖性。
本文提出了一种新型电极设计方案,通过不对称的电极形状的设计,使施加在液滴两侧的电润湿力不平衡,只需2个信号即可实现微液滴长距离、大规模的单向运输。
1 EWOD理论
如图1(a)液滴在固体表面的形状由液固表面张力γLG(N/m)决定。θ为接触角(contact angle,CA)。在界面处施加电压时,固液界面电荷分布发生变化,导致界面处润湿性和接触角发生改变,即电润湿现象[10]。Lippmann-Young方程描述了EWOD器件工作时接触角随驱动电压及液气表面张力γLG的关系
式中CE为电双层单位面积的电容,V为驱动电压,ε和ε0分别为介质层的相对介电常数及真空介电常数,t为介质层厚度。
利用电润湿原理实现液滴在电极间的运输(见图1(b)中x方向)时,液滴所受的驱动力可用接触线理论描述[12]
式中Fa,x,ea,Va和Fr,x,er,Vr分别为液滴两侧所受的EWOD力、接触线投影长度、电压。可以看出,x方向上驱动力大小与电极上方三相接触线的形状无关,与接触线在其垂直方向上的投影长度e呈正比。因此液滴的移动直接由两侧电压和接触线投影长度决定。

图1 EWOD原理及过程中驱动力和接触线示意[11]
2 两路信号控制的液滴单向运输器件设计
设计不对称电极形状,通过两个信号可以控制微液滴长距离、大规模的单向运输。
2.1 电极设计
图2是根据接触线理论,设计的双平面EWOD芯片。电极形状为在圆形基础上,一侧减少(凹陷一侧),另一侧相应增加,在轴心两侧各45°角的位置与圆相切(突出一侧)。将间隔的驱动电极(如1#、3#和2#、4#)分别相互连接,得到两组驱动电极,呈现首尾镶嵌的“心形”结构。两组电极间隔施加驱动信号,由于电极结构的不对称性造成液滴两侧接触线长度的差异,使液滴只受到一个方向的作用力,由此可以限制液滴运动路径,实现单向运输。
图2(b)展示了单个液滴,在静止时的受力情况。半径为Rd的液滴位于2#电极,当Rd/Re在一定范围内时,液滴与3#电极接触线投影长度大于与1#电极的接触线投影长度。当信号1加电压,信号2不加电压时,液滴在EWOD力的作用下向右移动至3#电极。以此类推,仅需通过信号1和信号2的交替加电,液滴即向右单向运输。
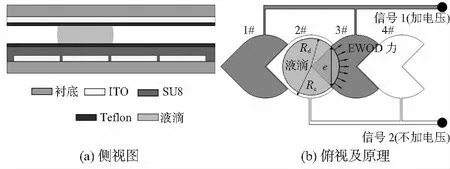
图2 两路信号控制的液滴单向运输器件结构及原理示意
2.2 仿真模拟
使用COMSOL Multiphysics仿真软件,耦合计算流体力学模块(两相流—水平集)和电学模块(静电场)建立了三维瞬态模型,对电场作用下单向运输器件中液滴的运动情况进行了计算分析(水—空气界面)。仿真几何模型采用中轴面对称,如图3所示。

图3 单向运输器件仿真几何模型
设置电极半径Re=500 μm,电极间隙30 μm,上下极板间高度H=100 μm。初始液滴设置为半径Rd=0.9 Re,高为H的圆柱。计算中使用的参数:SU8介质层厚度d1为1.5 μm,Teflon疏水层厚度d2为100 nm,SU8相对介电常数ε1为4.1,Teflon相对介电常数ε2为1.93,等效介质层厚度(等效为SU8)d为1.712 4 μm,真空介电常数ε0为8.854×10-12F/m,水—空气界面张力γSL为72.8 mN/m,初始接触角θ0为120°。
按照流体场、静电场划分正四面体网格。设置驱动信号为40 V的直流电压,驱动信号每10 ms切换一次。采用瞬态求解器,耦合静电场和流体场进行计算。
仿真结果显示,在信号切换过程中,液滴均能自左向右移动,实现单向运输。信号每一次切换后,液滴的驱动呈现典型阻尼振动特征,频率不变而振幅衰减,最后稳定在平衡位置。图4为信号第一次切换时,t=0,2,5,7,9 ms时器件的仿真结果图。t=0时,由第一组电极(1#、3#)加电、第二组电极(2#、4#)接地,切换到到第二组电极加电、第一组电极接地。

图4 器件仿真结果
图4(a)为流体相场(即水平集变量φ的分布),展示了水和空气在界面中的比例分布,深色为水,浅色为空气。t=0时刻,液滴稳定在1#电极的位置,由于电极形状和表面张力的综合作用,液滴轮廓大体上遵循电极形状,而位于电极突出和凹陷处的边缘较为圆润。当信号切换时,由于液滴的界面只能接触到原先平衡位置右边的电极,与1#电极左边不接触,因而左侧接触角增加而右侧接触角减小,EWOD力的变化造成界面上应力不平衡,形成液滴内部压强差,促使液滴向右侧移动。约5 ms时液滴完全移动到右侧电极上,在惯性的作用下继续向右移动,同时受EWOD力作用减速。7 ms时到达向右最远距离,速度降为0,向左边平衡位置移动,9 ms时回到平衡位置并基本稳定不再有大幅振荡。
图4(b)为流体速度场,展示了液滴和空气流动速度的分布。t=0 ms时,液滴内部流体速度为0,仅界面处具有速度,这是由界面曲率造成压力梯度所致[13];当信号切换时,液滴右侧接触到2#加电电极,右侧接触线长度大于左侧,拉动液滴右端边界使其拉长变形,当液滴伸展到一定长度时,在界面张力的带动下,液滴左端开始向右移动(t=2 ms时);t=5 ms时,液滴完全运动到2#电极,液滴整体速度达到最高;当液滴越过2#电极时右侧接触线长度小于左侧,整体受到向左的EWOD力而减速,至7 ms时液滴到达最右,右侧边缘减速到0后又向左移动;t=9 ms时趋于平衡位置,内部速度基本降到0。
图4(c)为压强场(等高线)和速度场(流线密度表示速度大小,同图4(b))。t=0 ms时,液滴处于平衡状态;信号切换瞬间,液滴右侧边缘接触到加电电极,接触角变小,右侧压强降低,向右移动,液滴拉长,t=2 ms时,左侧边缘开始向右移动;t=5 ms时液滴经过平衡位置并继续向右运动,压力梯度变小。t=7 ms时液滴运动到最右,左侧边缘接触到加电电极,接触角变小,左侧压强降低,向左减速;t=9 ms时液滴趋于平衡位置,液滴内压强均衡。
3 实验验证
按照仿真参数制作EWOD器件。采用1 kHz,70~100 Vrms正弦交流信号对工作电极施加信号,通过PC端LABVIEW软件及其他组件(信号发生器、放大器、继电器)控制电压输入。通过两个驱动信号的交替,在一维路径上实现了不同尺寸的液滴(例介于0.9~1之间)稳定的单向运输,与预测及理论计算结果相符,并实现了多个液滴的同步运输。图5为其中一个液滴的驱动过程与仿真结果的对照。

图5 单向运输器件实验与仿真结果对照
从图中可以看出,液滴的运动情况与仿真结果基本一致,不同之处主要有以下两点:1)信号切换后,液滴从静止状态经过下一个电极平衡位置用时约为67 ms,133 ms时重新回到平衡位置,所用时间远大于理论计算结果5 ms和9 ms,驱动最大速度低于理论结果,差别约在1个数量级;2)实验中液滴首次到达平衡位置后,往返振荡次数相较于仿真少,很快稳定在平衡位置。导致仿真和实验结果这种差别的主要原因分析如下:1)模型中假设了表面光滑无缺陷,实际Teflon表面微观上不平整,阻碍液滴运动;2)模型忽略了接触角迟滞,实际Teflon表面有接触角迟滞[14]。
4 结 论
本文根据接触线理论,提出一种运输方向上非对称的“心形”电极,构成典型的双平面EWOD器件。当液滴两侧的电极同时加电压时,由于左右两侧接触线长度不均衡造成施加在液滴两侧的EWOD力不平衡,使液滴向指定方向驱动。该新型器件仅用两路信号实现了液滴在一维路径上稳定的单向运输,并实现了多个液滴的同步运输。若液滴尺寸稍有变化其功能不受影响。
通过COMSOL仿真软件耦合流体场和静电场,对器件中液滴受力和运动进行了表征,获得了流体相、速度、压强等的场分布情况,描述了液滴在新器件中的驱动情况。其后制作和测试芯片对其功能进行了验证。在1 kHz,70~100 Vrms正弦交流信号驱动下,通过两个信号的交替施加,能够对Rd/Re介于0.9~1之间的液滴实现稳定的单向运输,与理论结果相符。该器件在芯片实验室中具有广泛的应用前景,如在片上PCR、流式单细胞分析等需要单向液滴运输的应用中能够简化芯片结构、优化控制信号。
