基于图像识别的全自动水域清理系统
2018-10-20罗霄刘庆廖自强
罗霄 刘庆 廖自强

摘要:近年来国内外水体富营养化现象时频发,致使藻类等浮游植物在短时间内疯长。水质恶化,水生生物窒息死亡等一系列环境污染问题日趋严重。本文介绍了一种全自动水上浮游植物清理系统,可以通过图像识别技术实现了清理的自动化与智能化,系統利用图像智能技术检测水生植物,并通过智能计算实现对水生植物清理船体的控制。系统能够实现对定点片区水域的水上浮游植物的打捞清理功能,具有智能化、低成本以及抗干扰能力强等优点。
关键词:图像识别清理系统自动化
中图分类号:TP391. 41
文献标识码:A
文章编号:1672 - 9129(2018)12 - 0117 - 01
引言:近些年来,国内外水体富营养化现象频频发生。以水藻为代表的浮萍类浮游植物和以水葫芦为代表的根茎类浮游植物大量生长,导致水体透明度下降、溶解氧减少,水质不断恶化,水体底层呈缺氧状态,导致一些鱼类窒息死亡。其中一些藻类会产生藻毒素,对水生生物和人畜的饮水安全也造成了威胁;一些藻类还会产生异味,影响周围居民的生活环境[1]。
现今的技术虽然能在一定程度上高效的清理水上浮游植物,但存在着效率低、成本高、易造成二次污染等问题。针对这些问题而展开对水上浮游植物清理系统研究和设计。
1 系统设计
1.1 系统组成。清理船体主要由船体动力部分、微型浮游植物清理部分、中小型浮游植物清理部分、图像识别与自动化部分、船体支撑部分五部分组成。船体动力部分主要由涵道风扇、电信号接收器、电动机、蓄电池、太阳能电池板等组成;微型浮游植物清理部分主要由止水器、过滤存储容器、透明水管、过滤网等组成;中小型浮游植物清理部分主要由推料轮、活塞压板、储蓄箱、铰刀等组成;图像识别与自动化部分主要由CCD相机、单片机、控制器、转换器、CSM无线发射装置等组成;船体支撑部分主要由橡胶气囊、支撑板等组成。
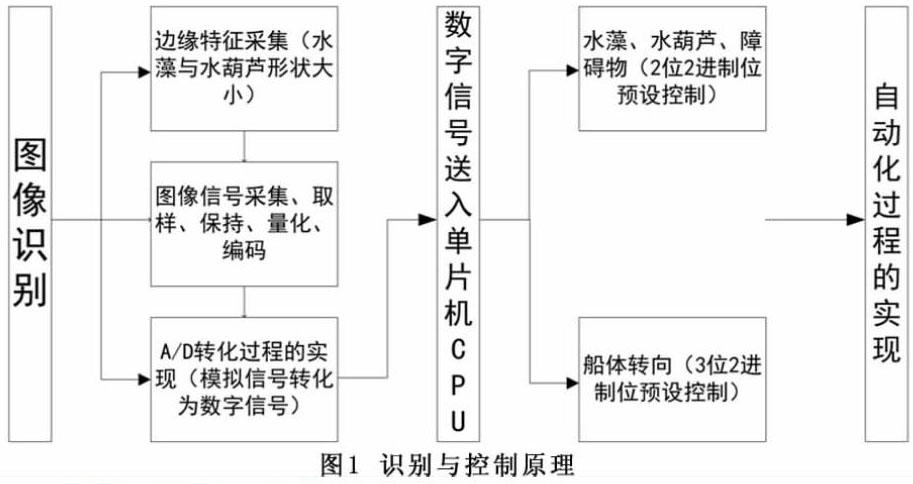
1.2 图像识别原理。如图l所示,清理船体在工作时,会通过CCD相机采集视频信息,并通过AD转换电路,将连续的视频信号或者图像信号进行数字化,送人单片机CPU与预设目标进行对比分析,由于水葫芦、水藻、障碍物体型差异较大,故本文采用图像轮廓特征、统计特征、GMM参数特征来作为目标的识别特征,并对特征向量进行内部归一化处理,将特征向量序列存入图像特征库。当分析结果与预设值的匹配度达到90%,则判断为正确,并对相应水域进行分类,再由相应类别的清理装置对其进行清理工作。从而达到不同类别的植物分开处理,分开储存的目的,实现更高效、更快捷、更自动化地清理水上浮游植物[2]。从此来努力巩固水上浮游植物清理整治成果,提供水体质量,让水生动物有更好的生活条件,并可以利用太阳能发电给蓄电池充电,创造更好的生态环境。
2 图像处理与自动化过程
在清理船体运作时,其清理路线可以实现完全的自动化。利用图像识别技术,船体的控制核心单片机CPU可以接受离散化之后的视频或者图像信息,并通过轮廓特征、统计特征、CMM参数特征分析[3]来判断行方向上的物体属性,并将判断结果转化为电信号,控制电信号发射器发送相应的信号,信号接收器对其进行接收,并控制涵道风扇的旋转速度和旋转方向,达到控制其运转速度和方向的目的。
当清理船体中的储物箱已经充满或已完成相应的清理工作时,位于储物箱底部的重力传感器检测到重力信号时,将其转化为电信号送入单片机,单片机通过控制电路关闭清理系统,此时船体将停止工作直线前进,并到达对岸,此时工作人员便可以将其中的储物箱取出,并清理储物箱中的植物,待清理完毕后再装入清理船体,如此循环往复将其进行重复利用。
控制系统如图2所示,系统利用AT89C51为控制中心,接受图片信号并做相应的处理,将处理结果传输到执行机构完成相应的调控作用。而软件系统的主要功能是控制图像采集卡捕捉采集浮游植物的图像,并对采集到的数字图像进行变换处理及特征值提取,实现计算机识别[4]。船体在运动过程中采集图像的视频信息,在主控电路里通过采样定理进行采样,并经过保持、量化、编码将模拟图像信号转化为数字信号送到单片机的CPU,单片机CPU经过解码之后,将控制信号送至执行机构,执行机构进行相应的转向操作和清理模式选择,并依次完成此过程,实现自动化过程。
3 结论
本系统实施后,将显著改善现有湖泊水质水生生物治理过程中的水藻清理技术,降低由于水生植物不及时清理而疯涨导致治理不可控的风险。与此同时,项目的实施增强人们的环保意识,提高整个社会环境保护意识与共同参与的积极性。系统对水体治理和环境保护建设服务的智能化发展具有重要意义。
参考文献:
[1]贾昌春,余增亮.湖泊富营养化水磁絮凝分离净化装置的开发及应用研究[D].安徽大学.2009.
[2]孙亮.计算机智能化图像识别技术的理论性突破[J].数字技术与应用,2013( 06):106 - 107.
[3]卢胜伟.基于图像处理的目标识别跟踪研究[D].长春理工大学,2008年.
[4]解晓康.基于迁移学习的模糊图像识别技术研究[D].华中科技大学,2016.
