自动紧急制动试验研究1
2018-10-10宋雪松吴海飞
文 /宋雪松 曹 寅 吴海飞
由于驾驶员的分心或者误判,车辆追尾事故是最常发生的交通事故之一。为帮助驾驶员避免该类追尾事故的发生,汽车制造商提供了一种自动紧急刹车系统(AEB),该系统可以进行前车碰撞预警(FCW),给予车辆适当的制动甚至使车辆自动停车。
一、测试标准对比
从2015年开始,欧洲新车评价组织(E-NCAP)根据2013推出的AEB-test-protocol-v-10《新乘用车自动紧急制动系统测试方法》(以下简称“2015 E-NCAP”),要求对新车增加此项目测试。联合国欧洲经济委员会汽车法规中131法规(以下简称“ECE 131”)法规实施早于2015 E-NCAP,但主要针对商用车。目前,这两个涉及AEB的测试方法被许多测试机构、主机厂等参考、采用。2015 E-NCAP 中的AEB测试场景主要分为前车静止(Car to Car Rear stationary,CCRs)、前车缓慢行驶(Car to Car Rear moving,CCRm)和前车制动(Car to Car Rear braking,CCRb)三种工况。2016年开始要求在E-NCAP的行人保护项中,增加针对行人的AEB测试场景要求,本文只讨论针对车辆的AEB测试。
2018 E-NCAP AEB测试场景与2015 E-NCAP AEB测试场景主要区别为:CCRb前车减速度为4 m/s2(E-NCAP为2 m/s2与6 m/s2);增加了误作用测试场景、相邻车道车辆制动试验和铁板试验,此参考美国高速公路安全管理局(NHTSA) AEB测试场景。关于测试场景,增加了与前车横向重叠测试场景;测试设备目标车由气球车变为全球目标车辆(GVT)。
二、方法关键点分析
国内AEB测试试验主要使用Vbox系统或驾驶机器人系统,本文试验设备使用驾驶机器人系统(见图1)。
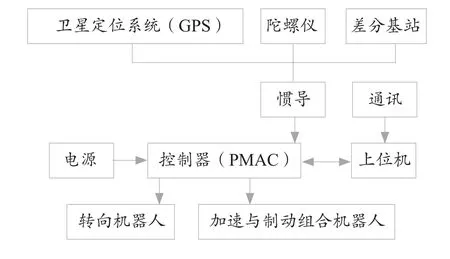
图1 某英国公司测试系统
通过两套组合惯导系统(惯性导航与卫星导航结合,主要包括GPS传感器、陀螺仪传感器和差分基站)和数据传输通讯系统得到高精确度的相对距离/报警时刻(TTC)/车辆运动参数进而验证测试车上所安装的主动安全系统性能指标,例如TTC值和自动紧急刹车碰撞减缓速度等。
1. 设备调节
ABD驾驶机器人控制器使用美国PMAC运动控制板卡,相当于一个三轴伺服电机系统,可以通过调节比例—积分—微分(PID)控制其运动执行精度。为达到试验测试精度要求,需要对测试系统进行PID调校,使其适配于试验测试车辆。
调节原则为:比例系数P的大小决定系统执行响应速度。P越大,系统响应速度越快,调节精度越高;P过大,将导致系统不稳定。积分系数I决定系统静态误差,I值太大,震荡增多,I太小,系统调节精度减小。微分系数D可以改变系统的动态特性,D值过大或过小会使系统调节时间变长。
针对AEB测试,驾驶机器人的PID调校分为三大类,分别为路径跟随调校(即对转向机器人进行调校)、速度调校(即对加速机器人与制动机器人进行调校)和制动机器人踏板调校(区别于速度调校中对制动机器人的调校。其目的是使制动减速度达到精度要求,在CCRb工况中非常重要)。路径跟随调校与速度调校有程序自带调校实验组,通过进行实验组中的试验,将车辆转向、加速、制动特性写入控制器,通过调节参数曲线,使调校变得简便。
在本文实验中,主车与从车均为直线行驶,直线路径跟随性能较容易达到实验要求的精度,根据调校经验,在直线路径跟随PID调校中,对P值给定0.6~0.8值,I值和D值使用默认值,均能到达实验要求精度。在速度调校过程中,一共有四种试验:恒定油门开度加速试验、油门开度交替试验、不同制动行程的制动试验、减速度值制动试验。速度调校过程,可通过试验数据写入,进行自动整定。制动机器人踏板调校无试验数据写入自动调校功能,需要根据试验设定减速度曲线与执行结果曲线作对比,来进行PID调校。
2. 测试试验分析
① 测试场景
根据E-NCAP主动安全项排名,选取一款AEB分数非常高的车型,对其进行AEB测试研究,验证其AEB策略与性能。参考2015版E-NCAP AEB测试规范,综合考虑测试安全与测试成本,简化测试场景,设置测试场景(见表1、表2):
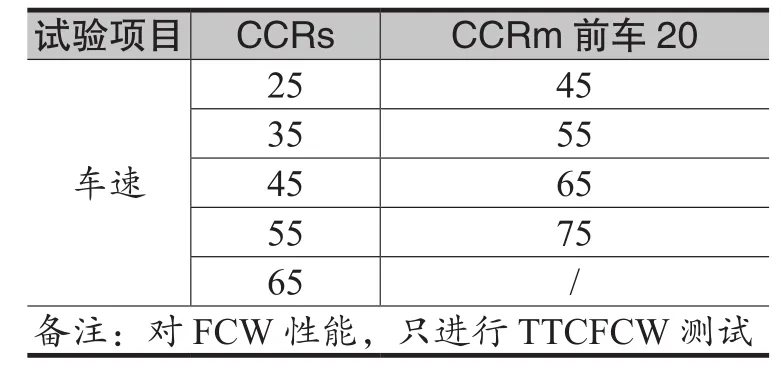
表1 AEB CCR测试场景 km/h

表2 AEB CCR测试测试结果 km/h
② 测试数据分析
本文实验中使用陀螺仪Oxford RT3002作为测试系统的运动参数(motion pack)测量工具。在进行离线实验数据(见图2)分析时,车辆位置与速度均为平滑曲线,采用原始数据。加速度曲线在制动过程中波动非常大,不能得到准确的加速度与时间关系,无法判断加速度波动趋势,需要对加速度数据进行滤波。参照2015 E-NCAP测试规范,本文采用12极点无相位移巴特沃斯滤波器对加速度进行滤波,截止频率为10 Hz。
TTCAEB:AEB系统出发时刻。即:首先确定已滤波减速度曲线中首个低于1 m/s2的数据点,而后从此点前推到减速度曲线首次与0.3 m/s2的TTC时刻。
TTCFCW:FCW发出声音警告,声音接收器检测到FCW报警的TTC。
通过数据分析发现,在CCRs25 km/h、CCRs35 km/h、CCRs45 km/h测试工况下,减速度绝对值先增加到10 m/s2,再减小至约3.5 m/s2减速度,其AEB策略逻辑为:以避免碰撞为主要原则,先减速再进行与前车的刹停距离控制。
控制策略分析:
· 其减速度控制策略相当于在保证自身车辆安全的基础上,减小了刹车减速度绝对值。在公共道路实际工况中,对AEB制动车辆的后方车辆更友好,给后方车辆更多的制动反应时间,能够减少追尾事件;
· 在CCRm前车20 km/h工况下,测试车在速度下降至20 km/h以下,约18 km/h时,车辆不再减速,同前车一起缓慢向前行驶,即车辆不减速至刹停,能够减少追尾事件;
· 从图2中可以发现测试车刹停后,车辆前缘距离气球车相对距离范围在0.1 m ~1.5 m内,距离分布保持稳定,能够增加驾驶员对AEB系统的理解,从而更好地掌握对AEB介入时的状态变化。
③ 测试主观评价
测试车的安全带张紧器在TTC约3 s时,会自动张紧。首先,能起到除视觉与声觉外的触觉FCW报警。其次,在进行AEB测试时,能明显地减缓由AEB介入导致的减速度急增的不适感。
三、不足与展望
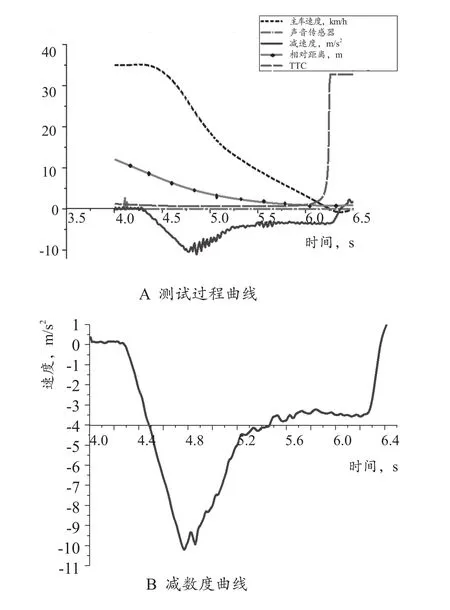
图2 CCRs35测试数据
本文试验设计属于黑箱测试,主要通过对测试车辆与目标车辆的运动参数如速度、加速度、相对距离等进行数据分析,可进一步讨论这些车辆内其他系统参数与AEB系统的相互影响,例如在NHTSA AEB 报告中,对TTCFCW与油门开度变化进行研究,FCW报警后约1.5 s,油门开度开始下降,FCW报警后约2.5 s油门开度降至0。
2018版E-NCAP的出台将极大地推动我国汽车市场AEB装车率,从而降低车辆碰撞损失。但测试场景中尚无我国特有事故场景,如车辆与电动二轮车的同向碰撞场景。
目前大多数自动紧急制动标准的测试场景仅代表在较理想光照条件下封闭道路场景中对前车的正向碰撞测试,在真实道路碰撞事故场景中,测试车与前方车辆会存在不同车辆航向角,不同车辆中心重叠,其他车辆对测试车影响的情况,使得安装有AEB的车辆无法进行有效的自动紧急制动。在实际工作中,对测试车与前车以正向不同重叠率工况进行了实验测试,对不同航向角工况仍需进一步实验研究。