基于ACC系统的目标车辆换道与出入弯道状态辨识算法∗
2017-09-15郭应时朱永振
王 畅,山 岩,赵 佳,郭应时,朱永振
基于ACC系统的目标车辆换道与出入弯道状态辨识算法∗
王 畅,山 岩,赵 佳,郭应时,朱永振
(长安大学汽车学院,西安 710064)
自适应巡航控制(ACC)系统利用雷达对前方目标进行追踪,当前车进行换道或进出弯道时,ACC系统无法区分这两种状态,容易引发交通冲突。针对此问题,本文中通过实际驾驶试验,获取了前车不同运动状态的数据,采用道路曲率估算值、前车行驶轨迹的斜率及其变化率和前车与自车之间横向距离作为表征参数,结合车-路协同运动特征,建立了前车换道与进出弯道的识别模型,并利用实测数据对模型的有效性进行了验证。结果表明:当自车处于直道时,对前车换道和进入弯道的识别率分别达到91.46%和89.81%;当自车处于弯道时,对前车换道和驶出弯道的识别率分别达到87.06%和90.42%。
自适应巡航控制系统;换道;进出弯道;雷达;状态辨识
前言
自适应巡航控制(adaptive cruise control,ACC)系统利用雷达或者其他传感器来追踪识别前方的车辆,自动控制车速,跟随前车保持一定距离行驶,在紧急情况下能自主制动,这在提高跟车安全性的同时也降低了驾驶人的操作负荷。ACC系统运行过程中,主要的控制算法可分为目标判断和自车速度控制两大类。当ACC系统确定跟随目标后,根据前车的速度和加减速特性,实时调整自车的速度,这是ACC系统控制算法的核心问题。实际使用效果表明,目前ACC系统依然存在一些尚待解决的问题,其目标判断算法目前还存在提升的空间。装备ACC系统的车(自车)与前方目标车辆(前车)都处于直道、或都处于弯道状态下,利用雷达传感器所返回的相对角度和相对距离数据,结合自车的转向盘转角和车身横摆角速度数据,可实现对前方目标的准确分类[1],确定自车需要跟随前方哪个目标行驶,这类算法目前已在ACC系统中得到应用[2]。
ACC系统工作过程中,当前车换道离开自车车道、或前车换道进入自车车道时,ACC系统须相应地做出反应,否则会引发严重的交通冲突。当自车处于直道,前车进入弯道、或自车处于弯道,而前车驶出弯道时,这两种情形下的雷达数据与前车换道状态下的数据十分相似。在这种状况下,ACC系统无法有效区分前车换道和进出弯道的行为,致使ACC系统的控制算法出现紊乱,引发自车的异常加减速,存在较大的安全隐患。针对上述问题,国内外学者开展了研究。文献[3]中提出了一种利用前车运动状态估计本车未来行驶轨迹的方法识别前方车辆进出弯道和换道行为。文献[4]中利用多项式拟合行驶轨迹的方法来区分前车换道和进入弯道行为。文献[5]和文献[6]中利用相对速度和相对角度的变化规律区分前车的换道和进入弯道行为。文献[7]中设计了一种考虑交通流特性的ACC系统算法,文献[8]中提出了考虑换道过程的ACC系统控制算法。
现有的研究中,大部分的目标识别算法并不针对ACC自车与前方目标车处于不同曲率半径路段的情况,而ACC系统实际使用过程中经常需要在这种场合工作。相关算法的缺失使ACC系统容易出现失误,这对车辆的安全运行存在不利影响。有的研究对ACC系统在弯道路段运行的工况进行了仿真。但真实道路交通环境下,车载传感器所获取的数据存在较大的干扰因素,基于仿真环境得到的研究结论无法直接运用于实车环境。
针对上述需求,并考虑ACC系统目前对前车加减速变化的响应算法已较成熟,本文中将研究内容聚焦于ACC系统如何面对其他车辆行驶状态切换所带来的干扰问题。具体地说,利用自车的车速、横摆角速度和前车与自车的相对角度、相对距离计算自车及前车的行驶轨迹。当自车处于直道行驶时,利用前车的轨迹斜率及其变化特征识别前车的换道和进入弯道行为。当自车处于弯道行驶时,利用前车的横向距离变化特征识别前车的换道和驶出弯道行为,实现对前车行驶状态的准确识别。
1 目标车辆行驶轨迹计算
车辆的行驶轨迹对表征车辆行驶状态具有重要作用,根据车辆的行驶轨迹可判断车辆的换道和弯道行驶情况。本文中通过建立基础坐标系,利用自车的速度和横摆角速度计算不同时刻自车在基础坐标系中的位置,以此得到自车行驶轨迹。然后利用雷达数据计算前车相对于自车的位置关系,得到前车行驶轨迹。行驶轨迹计算所需参数如表1所示。

表1 行驶轨迹需求参数
1.1 轨迹点坐标计算
以自车前保险杠正中心为原点,以垂直于车身前后轴并指向车辆前方的方向为y轴、以垂直于y轴指向车身右侧的方向为x轴建立笛卡尔坐标系,如图1所示。

图1 车辆轨迹点坐标示意图
车辆在正常行驶过程中所形成的轨迹为不规则曲线,如果把车辆行驶轨迹分割成很短的线段(例如0.1s内的行驶轨迹),则这些线段可以近似看作直线或者圆弧曲线,由此有

式中:v为车辆速度;ω为车身横摆角速度;Δt为时间步长;ΔL为车辆在一个时间步长内经过的距离;Δϕ为车身在一个时间步长内旋转的角度。
把曲线OA近似为圆弧曲线,所以三角形OAB为等腰三角形:

根据几何关系,得到A点在第n个坐标系中的位置:

由式(4)可计算tn+1时刻车辆在坐标系n中的位置,再通过式(1)可计算tn+1时刻车辆在之前任何坐标系中的位置。以此类推,最终得到自车第n+1个轨迹点在基础坐标系中的坐标(xH(n+1,1),

按照同样的方法可获得前方车辆在不同时刻的坐标数据。
1.2 道路曲率的估算
前面计算得到的车辆行驶轨迹为一系列离散坐标点,无法利用离散坐标点直接表示道路线形。利用多项式拟合轨迹坐标点,再求解拟合道路曲率[9]。
由于路面不平、减速带或噪声的影响,计算得到的行驶轨迹点误差较大,所以在计算道路曲率之前先对行驶轨迹数据进行均值滤波处理,以降低噪声干扰。利用四次多项式拟合车辆行驶轨迹坐标点。对于某平滑曲线y=f(x),曲线上某点处的曲率为

车辆行驶轨迹点的四次拟合方程为

将式(7)代入式(6)得

2 前车行驶状态识别模型的建立
把前车在道路上的行驶状态分为稳定状态和非稳定状态,其中稳定状态是指前车与自车在同一道路线形(直线或弯道)中稳定行驶,不发生车道变换和线形切换。非稳定状态是指前车和自车在不同道路线形之间切换(由直道进入弯道或由弯道进入直道)或者前车发生换道[10]。
2.1 自车处于直道时前车行驶状态识别模型
当自车处于直道,前车开始换道或进入弯道时,其行驶轨迹的斜率由零逐渐变大,并且行驶轨迹斜率会发生突变,所以利用行驶轨迹的斜率变化特征可识别前车的非稳定行驶状态。前车行驶轨迹斜率为
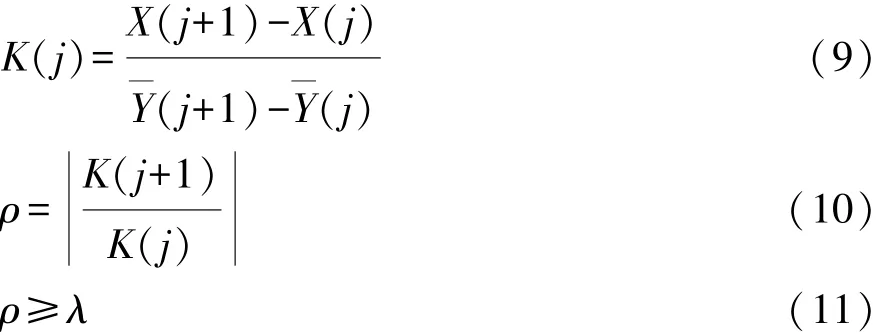
式中:X 为横向位移;Y为纵向位移;K为行驶轨迹斜率;ρ为相邻斜率的比值;λ为常数。若式(11)成立,则表明前车行驶轨迹斜率变化较大,有可能进入非稳定行驶状态。
当自车处于直道行驶时,前车进入弯道轨迹的斜率成递增趋势,不同次数的多项式均有很好的拟合优度。前车换道状态下,前车轨迹的斜率先单调递增,达到最高点后再逐渐减小,因此高次多项式对换道轨迹斜率有很好的拟合优度,而低次多项式拟合优度不高。因此,本文中利用高次多项式来拟合前车换道和进入弯道轨迹斜率,并利用确定系数R2检验拟合的质量。
2.2 自车处于弯道时前车行驶状态识别模型
自车处于弯道路段稳定行驶时,若前车换道或驶出弯道,两车在垂直于车道线方向上的横向距离会发生变化,利用该距离的变化规律识别前车的行驶状态。轨迹点无法直接计算前车与自车在垂直于车道线方向上的距离,所以利用二次多项式f(x)拟合自车最后记录得到的s个轨迹点,计算前车当前轨迹点距离二次曲线f(x)的距离d,以此代替两车在垂直于车道线上的距离。
采用与2.1节中类似的方法,可识别出前车是否进入非稳定状态。当识别到前车进入非稳定状态后,暂停坐标系更新,计算并记录两车的距离d,当记录的轨迹点数据个数达到m时利用直线对横向距离d的斜率进行拟合,并且轨迹点个数每增加Δm个进行拟合一次,直到拟合结果能识别出前车的换道和驶出弯道行为为止。
3 识别模型验证
3.1 验证数据的来源
为验证本文中所建立模型的有效性,基于小型乘用车设计开发了试验车,对20余名普通驾驶人进行了实际道路驾驶试验。试验过程中驾驶人不佩戴任何仪器,驾驶过程与平常驾驶过程相同。试验线路主要为城市快速环道和高速公路,每名被试者试验时长约1h。试验过程中,安装于车辆上的各种传感器同步实时采集车辆运动状态参数、交通环境参数和驾驶人操作行为参数,采样频率为20Hz。
与本文中模型密切相关的参数中,r和α来源于安装于车辆前保险杠中央的ESR微波雷达,距离测量范围为0~200m,精度为0.25m。角度测量范围为±45°,精度为0.5°。横摆角速度ω来源于安装于车辆中央的陀螺仪,型号为IMU02,测量精度为0.01°/s;车速v来源于车身CAN总线网络,测量精度为0.01km/h。转向盘转角θ来源于车身CAN总线网络,精度为1°。
3.2 自车处于直道时前车状态识别
(1)前车换道行为的识别
当道路曲率半径大于2 000m时,弯道就会变得不明显,所以设定当道路曲率半径小于2 000m时认为道路属于弯道,否则属于直道。
令n=5,即对行驶轨迹做均值滤波时,计算相邻5个轨迹点的平均坐标值。λ设为2.4,设m=20,Δm=5,即从前车被识别为进入非稳定行驶状态开始到进行第一次拟合之间的时间为2.0s,并且每隔0.5s拟合一次,直到识别出前车的具体行驶状态为止。δ值设为0.55,此时前车换道和进入弯道的识别率基本相同。设ω=15,即车辆横向位移连续变化次数小于15时,认为是车辆在车道线内的摆动,当横向位移连续变化次数大于15时,则认为前车可能发生换道或进入弯道行为。
随机选择前车的某次换道过程,此过程中自车的速度为80km/h,此过程中,根据前述模型得到前车轨迹如图2所示。
从图中可以看出,前车在t=3.1s时(轨迹图a点)开始换道,在t=6.8s换道结束(轨迹图b点),整个换道过程持续3.7s。前车状态识别结果如图3所示,预识别结果为0表示前车处于稳定行驶状态,预识别结果为1表示前车处于非稳定行驶状态。识别结果为0表示前车处于稳定行驶状态,识别结果为1表示前车换道,识别结果为2表示前车进出弯道。
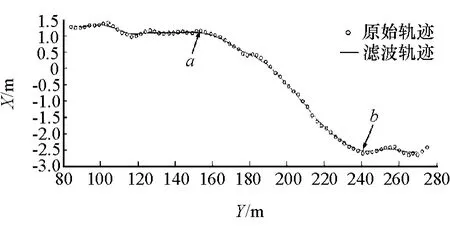
图2 v=80km/h前车换道轨迹
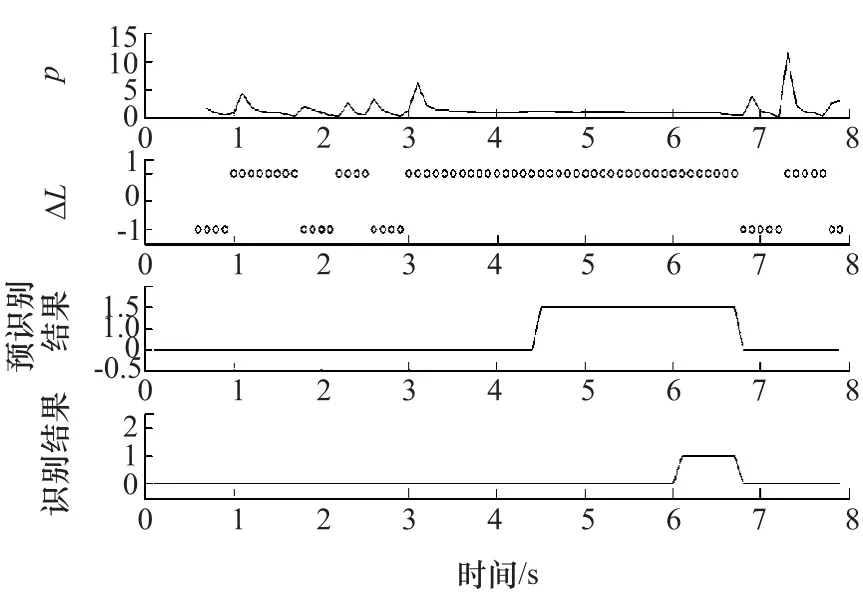
图3 v=80km/h前车换道识别结果
在换道开始前和换道结束后,前车轨迹斜率比值多次大于2.4,但是前车横向距离连续变大或变小点数不超过15个,所以判定为前车稳定行驶,预识别结果为0。当t=3.1s时,轨迹斜率比值为6.207,同时前车的横向距离从3.0s开始持续变小,到4.5s时连续变化个数达到15个,所以在4.5s时判定前车进入非稳定行驶状态,预识别结果变为1。t=6.9s时,轨迹斜率比值再次变大,同时前车的横向距离开始变大,说明非稳定行驶状态结束,预识别结果为0。
虽然在4.5s时识别为前车进入非稳定行驶状态,但换道开始时间为轨迹斜率比值第一次大于λ的时间,所以从轨迹斜率比值第一次大于λ开始收集数据进行轨迹斜率拟合。3.1至5.1s,3.1至5.6s,3.1至6.1s前车轨迹斜率对直线的拟合确定系数分别为0.955,0.533和0.172,在5.6和6.1s连续两次的拟合确定系数均小于0.55,所以在t=6.1s时识别为前车换道,识别结果为1,即换道识别结果延迟3.0s。当非稳定行驶状态结束时,换道行为结束,识别结果同时变为0。随机挑选的82组数据中,有75次被准确识别,识别耗费时间分布在2.0~3.0s之间,总体识别率为91.46%。
(2)前车进入弯道的识别
当自车以约70km/h的速度接近弯道路段时,前车进入弯道场景如图4所示。

图4 R=500m前车入弯监控视频
前车入弯识别结果如图5所示。

图5 R=500m前车入弯识别结果
从图中看出,前车在进入弯道后,横向距离开始持续变大,到达2.9s时连续变化位移达到15个。行驶轨迹斜率比值在1.6s达到最大10.78,所以t=2.9s时判定为前车进入非稳定行驶状态,预识别结果为1,比进入弯道时间延迟1.3s。1.6至3.6s,1.6至4.1s和1.6至4.6s前车的轨迹斜率对直线的拟合确定系数分别为0.978,0.929和0.897,所以t=4.1s前车识别为进入弯道,识别结果为2,比前车进入弯道延迟2.7s。总的验证数据中共有108组前车进入弯道的数据,其中97组被正确识别,识别率为89.81%。
3.3 自车处于弯道时前车状态识别
自车处于弯道时和自车处于直道时两车横向距离的变化特征基本相同,所以弯道行驶时的识别模型参数和直道行驶时的识别模型参数相同,即n=5,λ=2.4,δ=0.55,ω=15。令s=60,即利用二次多项式拟合自车行驶轨迹的最后60个轨迹点,然后计算前车到轨迹点拟合曲线的距离。
(1)前车换道行为的识别
自车处于弯道行驶时,某次前车换道过程中获取的数据如图6所示。

图6 自车处于弯道行驶时前车换道轨迹
自车处于弯道行驶时前车换道的识别结果如图7所示。
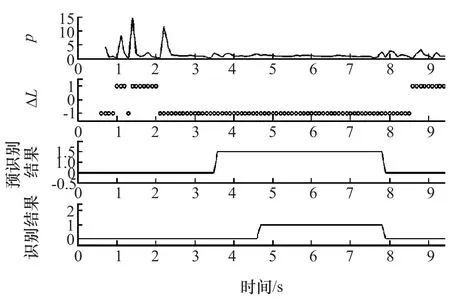
图7 自车处于弯道行驶时前车换道识别结果
从图中可以看出,两车横向距离在t=2.1s时开始连续增加,达到3.6s时连续变化位移达到15个,同时横向距离曲线的斜率比值在t=2.2s时达到11.51,所以在3.6s识别为前车进入非稳定行驶状态,预识别结果为1。2.2至4.2s和2.2至4.7s时两车横向距离斜率对直线的拟合确定系数分别为0.086 67,0.013 4,连续两次小于0.55,所以前车在4.7s时被识别为换道,识别结果为1,时间延迟2.5s。在t=7.8s时横向距离斜率比值为2.601,前车非稳定行驶状态结束,预识别结果重新变为0。总的验证数据中共随机挑选了85次数据,其中本文模型识别出了74次,总的准确率为87.06%。
(2)前车驶出弯道的识别
自车处于弯道行驶时,某次前车驶出弯道获取的数据如图8所示。
自车处于弯道行驶时前车出弯识别结果如图9所示。

图8 自车处于弯道行驶时自车和前车出弯轨迹

图9 自车处于弯道行驶时前车出弯识别结果
从图中可以看出,在t=4.6s时横向距离斜率比值达到最大值23.7,同时横向距离开始持续变大,到6.1s时连续变化位移达到15个,所以在6.1s识别为前车进入非稳定行驶状态,预识别结果变为1。在4.6至6.6s,4.6至7.1s和4.6至7.5s横向距离斜率对直线的拟合确定系数分别为0.767 4,0.855 1和0.844,全部大于0.55,所以前车在t=7.1s被识别驶出弯道,识别结果变为2,比实际出弯时间延迟2.5s。当自车驶出弯道时,前车非稳定行驶状态结束。验证数据中共有94次前车驶出弯道的数据,其中85次被准确识别,总的识别率为90.42%。
4 结论
(1)利用自车运动状态追踪数据,结合自车与前车的相对运动状态数据,可实时追踪前车的运动轨迹,具有良好的追踪精度。
(2)前车换道、进出弯道的状态从雷达数据角度而言较相似,通过采用道路曲率估算值、前车行驶轨迹的斜率及斜率比值和前车与自车之间横向距离作为表征参数,结合车-路协同运动特征,实现了对前车状态的识别,具有较好的精度。
(3)从车载安全系统的需求而言,尽早确定前车状态可有效提升系统的可靠性,但如果过早地确定前车状态又容易出现误判断,如何在实际车载环境下协调这两者的矛盾有待今后进一步研究。
[1] 高振海,王竣,王德平,等.汽车前方静动目标状态转移机理与分类算法[J].汽车工程,2016,38(5):638-645.
[2] 高振海,严伟,李红建,等.基于模拟驾驶员多目标决策的汽车自适应巡航控制算法[J].汽车工程,2015,37(6):667-673.
[3] 陈达兴.自适应巡航控制系统中前方有效目标识别算法研究[D].长春:吉林大学,2011.
[4] 耿石峰.基于轨迹分析的自适应巡航系统目标识别方法研究[D].长春:吉林大学,2015.
[5] 张德兆.基于弯道行驶的车辆自适应巡航控制[D].北京:清华大学,2011.
[6] ZHANG D,LI K,WANG J.Radar-based target identification and tracking on a curved road[J].IMechE Part D:Journal of Automobile Engineering,2012,226(1):39-47.
[7] Van AREM B,Van DRIEL C J G,VISSER R.The impact of cooperative adaptive cruise control on traffic-flow characteristics[J]. IEEE Transactions on Intelligent Transportation Systems,2006,7 (4):429-436.
[8] IOANNOU P A,STEFANOVIC M.Evaluation of ACC vehicles in mixed traffic:lane change effects and sensitivity analysis[J]. IEEE Transactions on Intelligent Transportation Systems,2005,6 (1):79-89.
[9] RAJAMANI R,ZHU C.Semi-autonomous adaptive cruise control systems[J].IEEE Transactions on Vehicular Technology,2002,51 (5):1186-1192.
[10] MILANÉS V,SHLADOVER S E,SPRING J,et al.Cooperative adaptive cruise control in real traffic situations[J].IEEE Transactions on Intelligent Transportation Systems,2014,15(1):296-305.
[11] RAJAMANI R,ZHU C.Semi-autonomous adaptive cruise control systems[J].IEEE Transactions on Vehicular Technology,2002,51(5):1186-1192.
An Algorithm for State Identification of Lane Change and Curve Entry/Exit of Target Vehicle Based on ACC System
Wang Chang,Shan Yan,Zhao Jia,Guo Yingshi&Zhu Yongzhen
School of Automobile,Chang'an University,Xi'an 710064
Adaptive cruise control(ACC)system uses radar to track preceding target,but it is unable to distinguish whether the preceding vehicle is doing lane change or entering/exiting curved road,easily leading to traffic conflict.Aiming at this problem,the data of preceding vehicle in different running states are collected by driving test.The estimated values of road curvature,the slope and its changing rate of preceding vehicle trajectory,and the lateral distance between host vehicle and preceding vehicle are taken as characteristic parameters.With consideration of the cooperative characteristics between vehicle and road,an identification model for lane change and curve entry/exit of preceding vehicle is established with its effectiveness verified by road test data.The results show that when the host vehicle is on a straight road,the recognition rate of lane change and curve entry of preceding vehicle reaches 91.46%and 89.81%respectively;and when the host vehicle is on a curved road,the recognition rate of lane change and curve exit of preceding vehicle reaches 87.06%and 90.42%respectively.
ACC system;lane change;curve entry/exit;radar;state identification
10.19562/j.chinasae.qcgc.2017.08.011
∗国家自然科学基金项目(61374196)、陕西省自然科学基金项目(2016JQ5096)和中央高校基本科研业务费专项资金项目(310822151028,310822171118,310822161009)资助。
原稿收到日期为2016年11月28日,修改稿收到日期为2017年2月13日。
王畅,副教授,E-mail:wangchang0905@163.com。
