液压激振源自激振动深松机深松单体设计与试验
2018-06-21王云霞张东兴李玉环刘彦伟
王云霞,张东兴,杨 丽,崔 涛,李玉环,刘彦伟
(中国农业大学工学院,北京 100083)
0 引 言
土壤耕整是农业生产的基础环节,耕整部件对土壤进行有效疏松,能够使作物获得良好的生长条件,是作物产量的有效保证[1-3]。深松技术作为一种新型整地技术,因其具有土壤表层扰动量少、有效打破犁底层、土壤改良效果显著的优势,在国内外得到大面积推广应用[4-6]。深松技术要求耕作深度在30 cm以上,作业阻力大,配套动力要求较高[7-9]。因此,深松减阻技术成为国内外学者研究的热点。
自激振动深松减阻技术是借助土壤阻力与激振源的综合作用,使深松铲自发地产生振动,不仅具有一定的减阻效果,还能较好的松动土壤,增大底部土壤疏松面积[10-13]。目前,国内外关于自激振动减阻技术的研究主要集中于以弹簧为激振源的深松机具。Yow等[10]通过试验研究发现,弹簧激振源的深松铲能够起到较好的减阻效果,与非振动深松相比,减阻比可达28%。邱立春等[11]通过在全方位深松机上安装弹簧,测试自激振动深松的减阻效果。深松机安装弹性元件后,耕作时减阻效果明显,耕深27 cm时,牵引阻力平均减少10.81%,土壤疏松效果得到改善。
然而,试验过程中发现,弹簧激振源的自激振动深松机由于弹簧刚度一定,应对土壤阻力的范围有限,在土壤阻力差异较大的不同地块作业时,存在适应性差、自激振动间断失效的问题,导致耕深稳定性和减阻效果得不到保证。Berntsen[12]选择不同刚度的弹簧,在已耕地与未耕地进行了对比试验。试验结果表明,深松铲的减阻效果受弹簧刚度影响,同一弹簧在不同土壤条件下作业时,减阻效果、耕深稳定性存在明显差异。Mouazen等[13]指出,弹簧激振源的深松铲作业时易受土壤类型、物理特性参数影响,作业效果无法得到很好地保证。为获得稳定耕深,提高弹簧激振源深松机具适应性,张军昌等[14]设计了一种入土角可控的自激式振动深松机,通过增加上、下固定板限制弹簧伸缩范围,使深松铲在预定幅度范围内振动,以此保证耕深。崔涛等[15]设计了一种弹簧预紧力调节装置,通过改变弹簧预紧力增强深松铲的适应性。对于自激振动深松机,激振源刚度相对于土壤阻力过大或过小都会导致激振源无法振动,自激振动失效。限定弹簧伸缩范围只能稳定耕深而无法避免自激振动失效的情况,调节预紧力只能小范围改善机具的适应性,无法从根本上解决其适应性差的问题。
考虑到现有自激振动深松机作业时弹簧不易更换的问题,同时需要提高机具对不同作业条件的适应性,本文提出了一种液压激振源的自激振动深松方法,设计了液压激振源深松单体以及压力调节系统,以期实现激振源刚度的快速调节,提高激振源对不同土壤阻力的应对能力,从而解决自激振动深松机具作业过程中出现的自激振动失效和耕深稳定性差的问题,达到改善机具适应性的效果。
1 液压激振深松单体结构与工作原理
1.1 深松单体结构
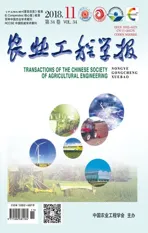
液压激振源深松单体结构如图 1所示,主要由固定架、液压缸、深松铲连接板、深松铲、镇压轮连接臂、镇压轮组成。液压缸倾斜安装,两端分别与固定架、深松铲连接板铰接,深松铲振动时,液压缸随之伸缩。镇压轮通过镇压轮连接臂与深松铲连接板铰接,实现随地仿形。单体的整体尺寸为830 mm×200 mm× 880 mm(长×宽×高),质量约50 kg,其中深松铲长度为600 mm,液压缸缸径为40 mm、行程为130 mm。单体可耕作深度为200~400 mm,镇压轮横向镇压宽度为200 mm。
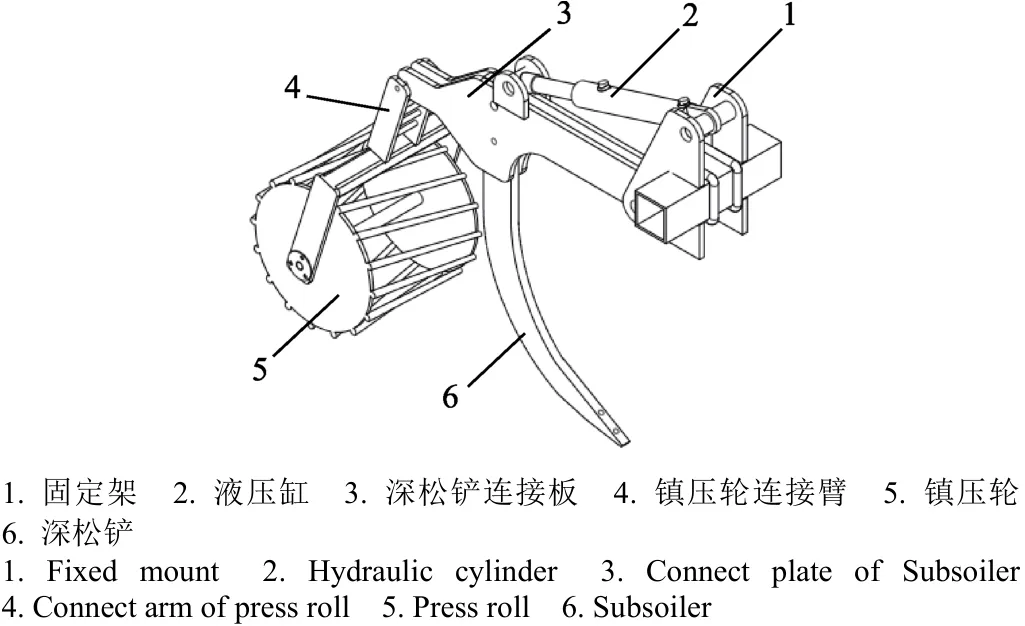
图1 液压激振源深松单体结构示意图Fig.1 Structure of hydraulically self-excited vibration subsoiler
1.2 压力调节系统
为方便调节液压缸压力,设计了压力调节系统。压力调节系统主要由液压部分和控制部分组成,如图 2所示。液压部分主要包括液压源、蓄能器、手动减压阀、电磁比例减压阀。液压源可由拖拉机液压输出提供,蓄能器用于稳定系统压力,电磁比例减压阀可连续、成比例的调节液压缸压力。在蓄能器与电磁比例减压阀之间增设手动减压阀,使进入比例电磁阀的压力与液压缸压力接近,减少比例电磁阀调节液压缸压力时引起的脉动冲击[16]。蓄能器选用质量较轻、反应灵敏的气囊式蓄能器,容积为2.5 L,充气压力为16 MPa,可保证系统压力不低于16 MPa。手动减压阀选用直动型DR6DP-5X/210,阀前最大压力为21 MPa,阀后压力手动可调。电磁比例减压阀选用DRE61-1X/175,阀前最大压力为17.5 MPa,阀后压力可根据输入电压连续、成比例控制,输入电压为0~10 V。
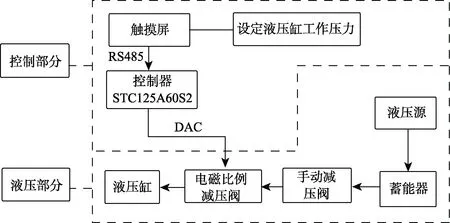
图2 液压缸压力调节系统工作原理Fig.2 Working principle of pressure adjusting system for hydraulic cylinder
控制部分主要由控制器、触摸屏组成,控制器核心部件选用STC125A60S2单片机,经DAC转换模块(digital to analog converter)将设定压力对应的电压值输入到电磁比例减压阀,调节液压缸压力到设定压力,设定压力可通过触摸屏输入。
1.3 工作原理
液压激振源深松单体工作时,液压缸内具有一定压力,保证深松铲顺利入土。土壤阻力增大至大于液压缸提供的压力时,深松铲带动深松铲连接板向上摆动,液压缸被压缩;土壤阻力减小至小于液压缸提供的压力时,液压缸推动深松铲连接板向下摆动,深松铲恢复到原始位置,液压缸伸长。以上过程周而复始,形成深松铲的自激振动。镇压轮随地仿行可实现对土壤的连续镇压,保水保墒。当需要改变液压缸工作压力时,通过触摸屏输入设定压力,控制器控制电磁比例减压阀使液压缸压力达到设定值。
2 激振源关键参数确定
液压缸作为深松单体的激振源,是深松单体的核心部件,其缸径和行程是设计时要考虑的 2个关键结构参数。液压缸缸径可根据负载选取,行程由深松铲的运动轨迹决定,因此,需对深松铲进行力学和运动学分析。
2.1 深松单体力学分析
深松铲在土壤中运动分析可简化为二维平面运动模型[17],如图3所示,以O为原点,建立直角坐标系,对深松单体受力进行分析。
图3 液压深松单体受力分析Fig.3 Force analysis of hydraulically self-excited vibration subsoiler
深松铲与深松铲连接板之间的连接属于刚性连接,为简化受力分析,将两者视为一体。深松铲所受的作用力主要来自对土壤进行提升、剪切过程中产生的反作用力以及底部土壤的摩擦力[18],以上作用力可等效为土壤阻力FR。除此之外,深松铲还受底部土壤支撑力FP、单体固定架的作用力、液压缸产生的推力以及自身重力。单体固定架与深松铲连接板铰接,无法传递力矩,因此深松铲连接板在O点的受力可等效为水平分力FOX和竖直分立FOY。液压缸下端与深松铲连接板铰接于A点,对深松铲连接板所产生的推力FW只能沿液压缸伸长方向。自身重力主要考虑深松铲连接板重力 m1g、深松铲重力m2g。本系统中自身重力不是主要作用力,为简化分析过程,将深松铲连接板、深松铲质心等效为作用点C1、C2。由平面力系力矩方程可得式(1)~(3)[19]。
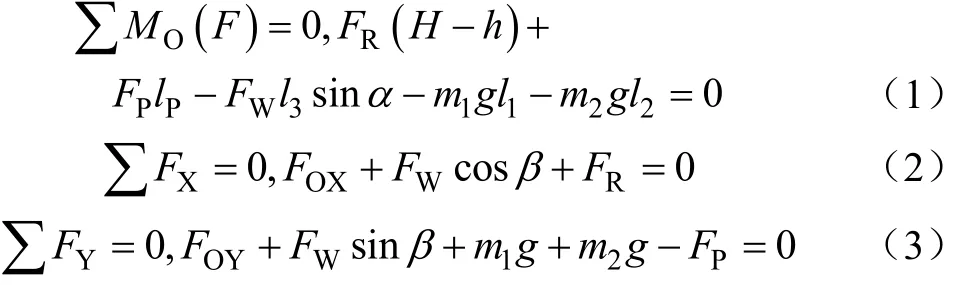
由(1)~(3)式整理得:

式中H为铲尖距O点的垂直距离,mm;h为铲尖与土壤阻力 FR等效作用点垂直距离,mm;lP为土壤支撑力 FP等效作用点到O点水平距离,mm;l1为深松铲连接板质心C1与O点水平距离,mm;l2为深松铲质心C2与O点水平距离,mm;l3为O点与A点距离,mm;α为AB方向与AO方向的夹角,(°);β为BA方向与水平方向夹角,(°)。
液压缸对深松铲连接板的推力FW主要用于克服深松铲由翘起恢复到原始位置过程中所受的土壤阻力 FR,此时底部土壤支撑力 FP=0。由于土壤阻力受土壤条件及深松深度影响,根据文献[20]~[23]初步选定深松 250~300 mm时土壤阻力FR=3.5~4.5 kN,假定土壤阻力作用点位置处于深松深度的中间位置,则h=125~150 mm。深松铲及深松铲连接板质量m1、m2称质量可得,H、α、l1、l2、l3为深松铲的设计尺寸,其中:m1=22.5 kg;m2=13.6 kg;H=600 mm;a=29.0°;l1=251.2 mm;l2=408.3 mm; l3=412.5 mm。通过计算得出液压缸对深松铲连接板的推力FW的取值范围为8.59~9.18 kN,即液压缸负载为8.59~9.18 kN。根据液压设计手册,选取液压缸缸径D=40 mm[16]。
2.2 深松单体运动学分析
深松铲振动过程中液压缸随之伸缩,深松铲振动的极限位置是确定活塞杆行程的依据。因此,需要对深松铲运动轨迹进行分析。考虑到深松作业时会遇到尺寸较大的坚硬土块、石头等,为使深松铲有效避开,延长使用寿命,初定深松铲最大纵向振动幅度为100 mm。
如图4所示,以O为圆心建立直角坐标系,铲尖C的轨迹为以O为圆心,R为半径的圆周。设深松铲到达上极限位置时,铲尖纵向移动距离k=100 mm;深松铲对应的振动角为θ,满足公式(5)~(8):整理得式(9)。
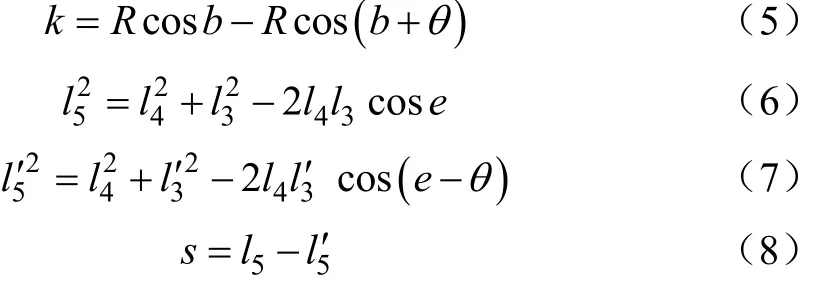
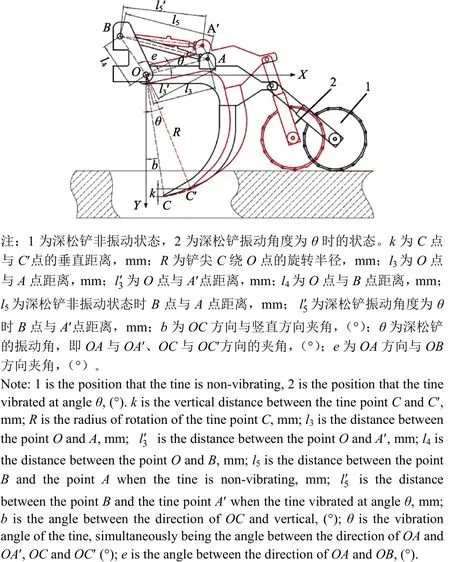
图4 液压深松单体运动学分析Fig.4 Kinematics analysis of hydraulically self-excited vibration subsoiler
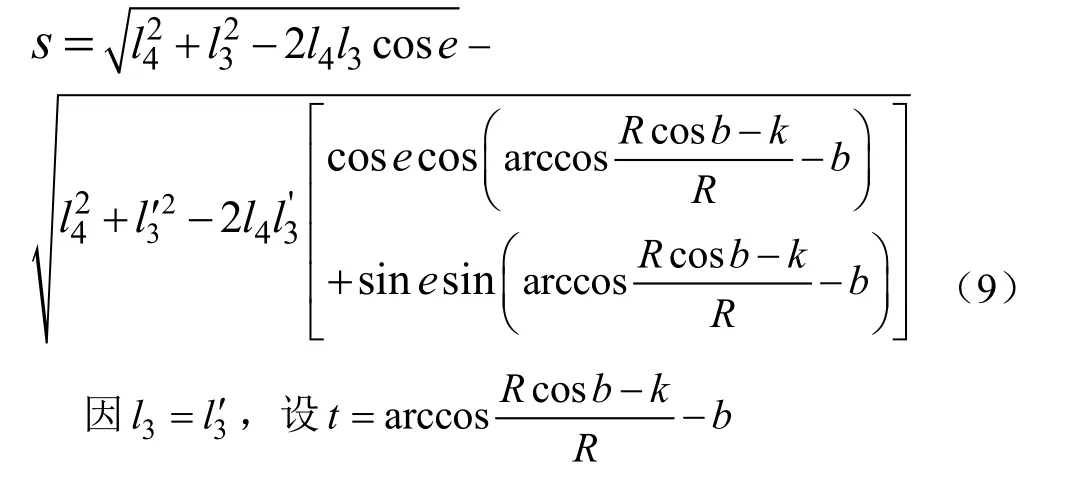
整理得式(10)。

式中l3为O点与A点距离,mm;3l′为O点与A′点距离,mm;l4为O点与B点距离,mm;l5为深松铲非振动状态时A点与B点距离,mm;5l′为深松铲振动θ角度后A′点与B点距离,mm;b为OC方向与竖直方向夹角,(°);θ为深松铲的振动角,即OA与OA′、OC与OC′方向的夹角,(°);e为OA方向与OB方向夹角,(°);k为铲尖纵向移动距离,k=100 mm。l3、3l′、l4、R、b、e为深松单体设计尺寸,其中:l4=264.2 mm;l3=3l′=412.5 mm;R=618.7 mm;b=8.5°;e=99.6°。最终求得s=130 mm,即液压缸行程确定为130 mm。
3 深松单体工作性能试验
自激振动深松作业时,作业效果主要受激振源刚度、土壤阻力、作业速度影响,其中土壤阻力主要通过土壤坚实度体现[20]。为探究液压缸压力、土壤坚实度、作业速度对液压激振源深松单体工作性能的影响规律,选取耕深变异系数、牵引阻力为评价指标,液压缸压力、土壤坚实度、作业速度为试验因素,进行二次回归通用旋转组合试验。
3.1 试验设备与条件
试验在中国农业大学土槽实验室进行,土槽尺寸30 m×2 m×1 m(长×宽×高),土壤深度约0.4 m。土槽台车如图5所示,主要包括牵引系统、三点悬挂装置、升降电机、液压输出系统、牵引阻力检测系统。土槽台车的作业速度可设置为0~5 km/h,耕深设置为0~30 cm。液压系统可提供一组恒压油源,输出压力为16 MPa。本文设计的液压激振源深松单体通过三点悬挂系统挂接在土槽台车上,耕深通过升降系统调节。试验时,土槽台车带动深松单体由右向左行驶,土槽台车与深松单体之间装有测力传感器,可检测深松单体的牵引阻力。试验时通过人工制备土壤模拟田间环境,制备土壤分为旋耕、平整、洒水、压实4个步骤进行,操作后土壤含水率为18.5%~20.0%之间。
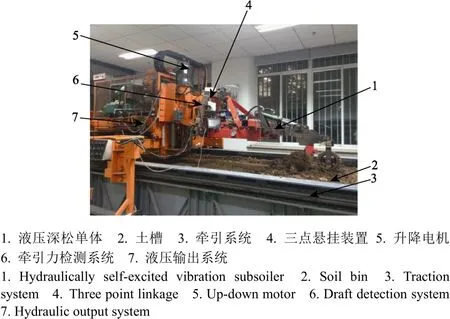
图5 土槽试验Fig.5 Soil bin test
为获取不同的土壤坚实度,需对土壤坚实度进行标定。含水率一定情况下,土壤坚实度与压实次数有关。为获得压实次数与土壤坚实度的关系,设置不同压实次数的试验,分别为2、4、6、8次。压实后采集0~35 cm土层土壤坚实度,对获得的数据进行回归分析,如图 6所示。得到的回归方程为y=0.03x+1.07,土壤坚实度与镇压次数线性正相关,相关系数R2为0.96。
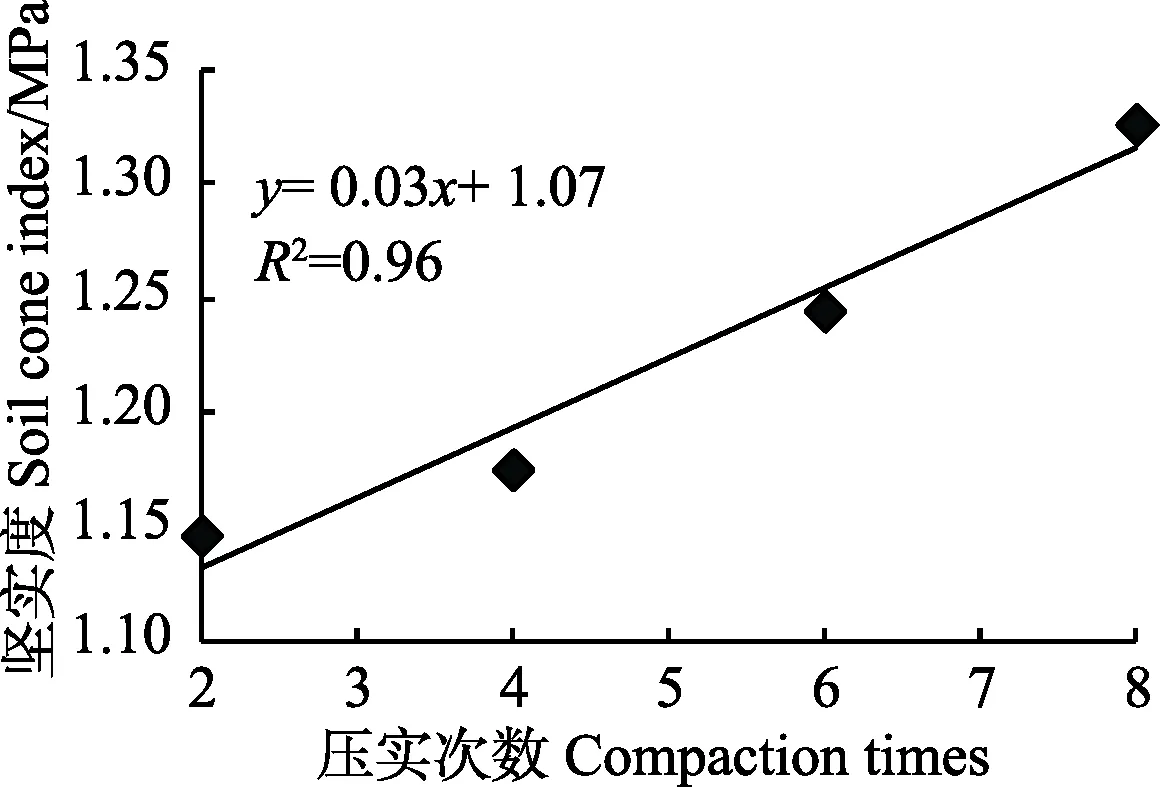
图6 坚实度标定结果Fig.6 Calibration result of soil cone index
3.2 试验方案
以液压缸压力、作业速度、土壤坚实度为试验因素,耕深变异系数、牵引力为评价指标。结合预试验深松铲作业效果,选取液压缸压力为2.0~4.0 MPa;压实次数选取2~8次,根据土壤坚实度标定结果,对应土壤坚实度取值范围为1.12~1.33 MPa;作业速度选取1.0~3.0 km/h。由二次旋转组合试验设计原则,确定编码系数γ为1.682[24-26],编码结果如表1所示。
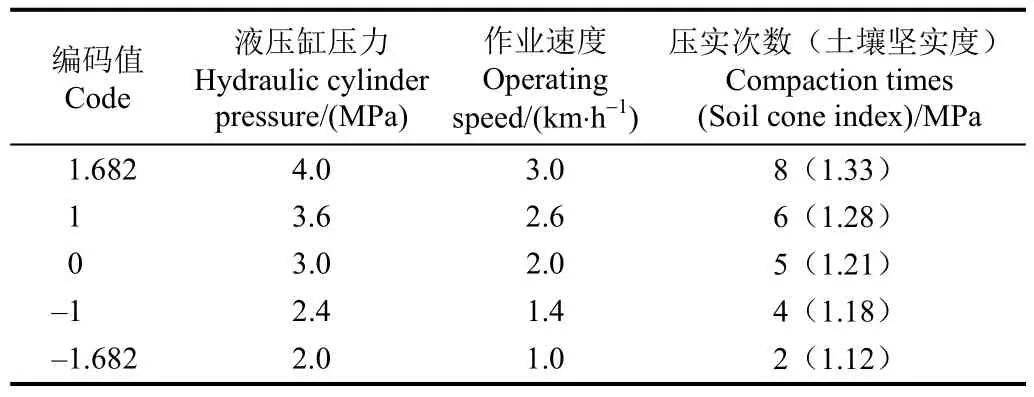
表1 试验因素编码表Table.1 Code of test factors
3.3 评价指标
3.3.1 耕深变异系数
耕深变异系数是评价耕深稳定性的性能指标,耕深变异系数越小,表明耕深变异越小,耕深越稳定。试验过后,根据文献[27]测量耕深式(11)~(13),并计算耕深变异系数V。
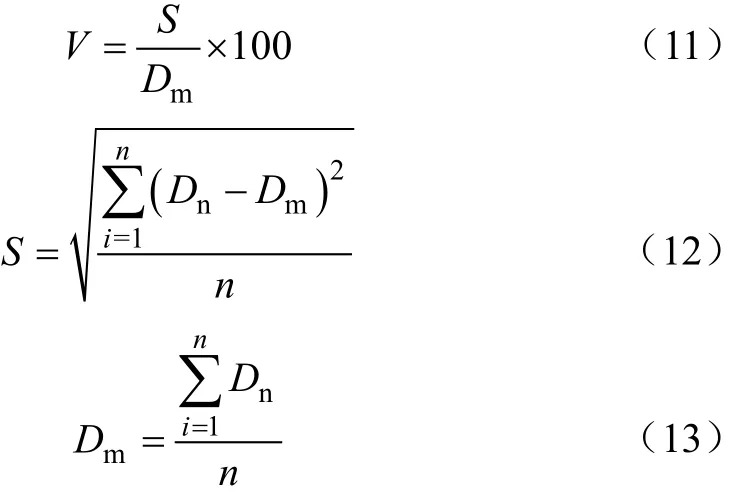
式中S为耕深标准差,cm;Dm为采样点平均耕深,cm;Dn为第n个采样点耕深,cm;n为采样点数。
3.2.2 牵引力
自激振动深松作业时,耕深满足作业要求情况下,牵引力越小,表明自激振动减阻效果越好。土槽台车与深松单体挂接装置之间装有测力传感器,试验过程中,测力传感器实时获取牵引力的数据并上传到上位机,以报表形式显示。
4 结果与分析
4.1 回归分析
土槽试验结果如表2所示。采用Design-Expert 8.0.6软件对试验数据进行分析,采用Quadratic模型建立耕深变异系数 V、牵引力 F的回归模型,回归模型的显著性检验结果如表3所示。
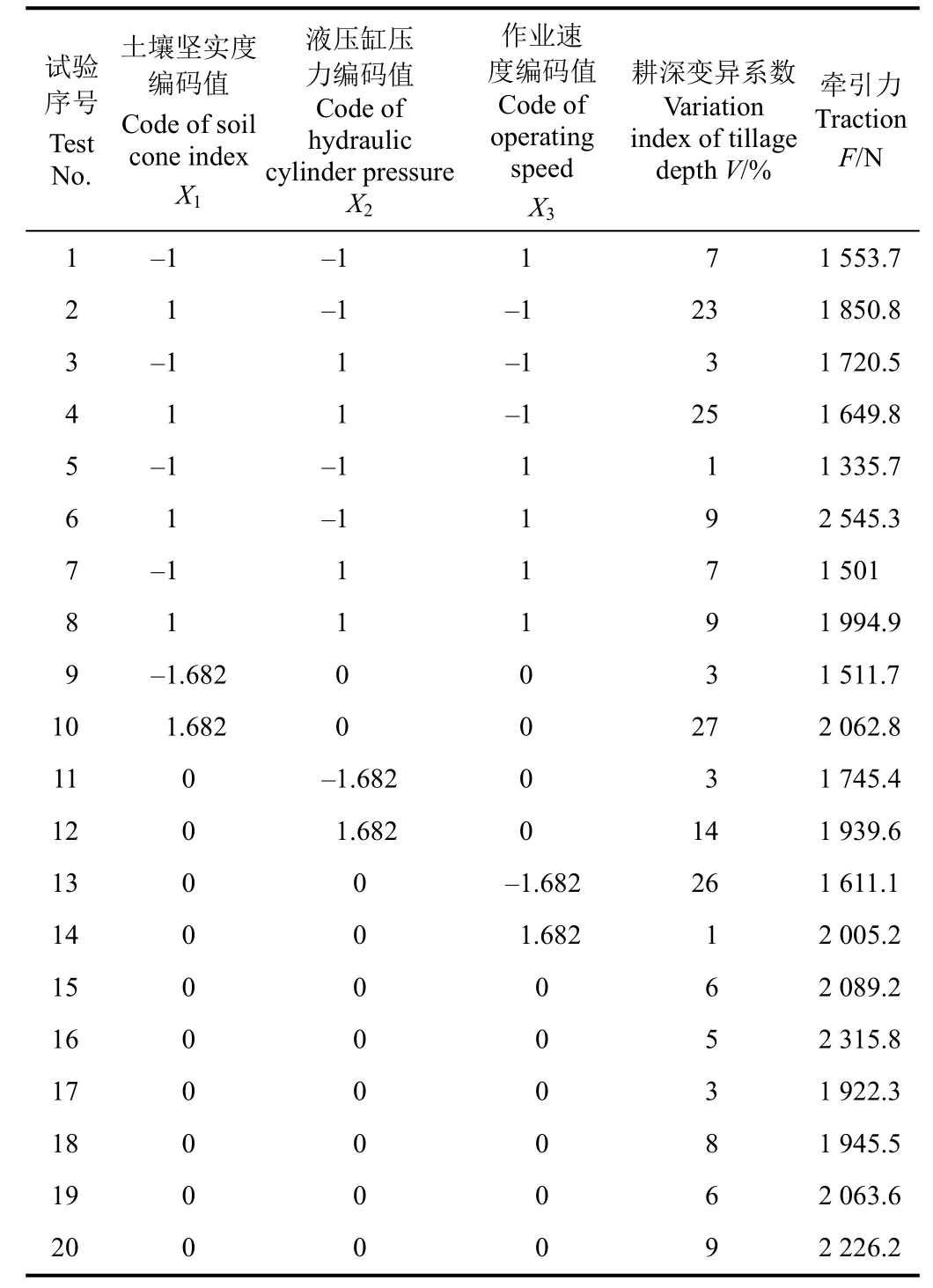
表2 土槽试验结果Table.2 Results of soil bin test
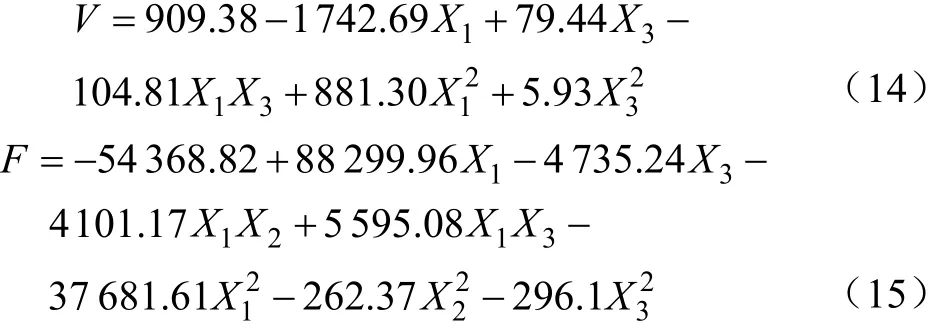
根据耕深变异系数V的分析结果可知,X1、X3、X1X3、、项的系数达到显著性水平(P<0.05),其余项不显著。回归模型的P值小于 0.001,而失拟项的 P值为0.066,说明回归模型极其显著且失拟不显著,回归有效。同理,由牵引力 F统计分析结果可知,X1、X3、X1X2、X1X3、、、项的系数达到显著性水平(P<0.05),其余项不显著。回归模型的P值为0.001,失拟项的P值为0.648,说明回归模型极其显著,失拟不显著,回归有效。将不显著项删除后得到耕深变异系数 V、牵引力 F的回归方程如式(14)~(15)。
4.2 单因子对响应值的影响效果分析
4.2.1 耕深变异系数
采用降维方法分析单因子对响应值的影响效应,根据响应值的回归方程,将其它因子固定在零水平[26],单因子效应曲线如图 7所示。土壤坚实度、作业速度、液压缸压力对耕深变异系数的影响效果如图7a所示,土壤坚实度、作业速度对变异系数的影响为正效应,而液压缸压力对变异系数的影响为负效应。曲线斜率越高,表明该因素的变化对指标的扰动越大,而相对平缓的曲线则说明因素对指标的扰动较小。土壤坚实度、液压缸压力对耕深变异系数扰动较大,作业速度扰动较小。
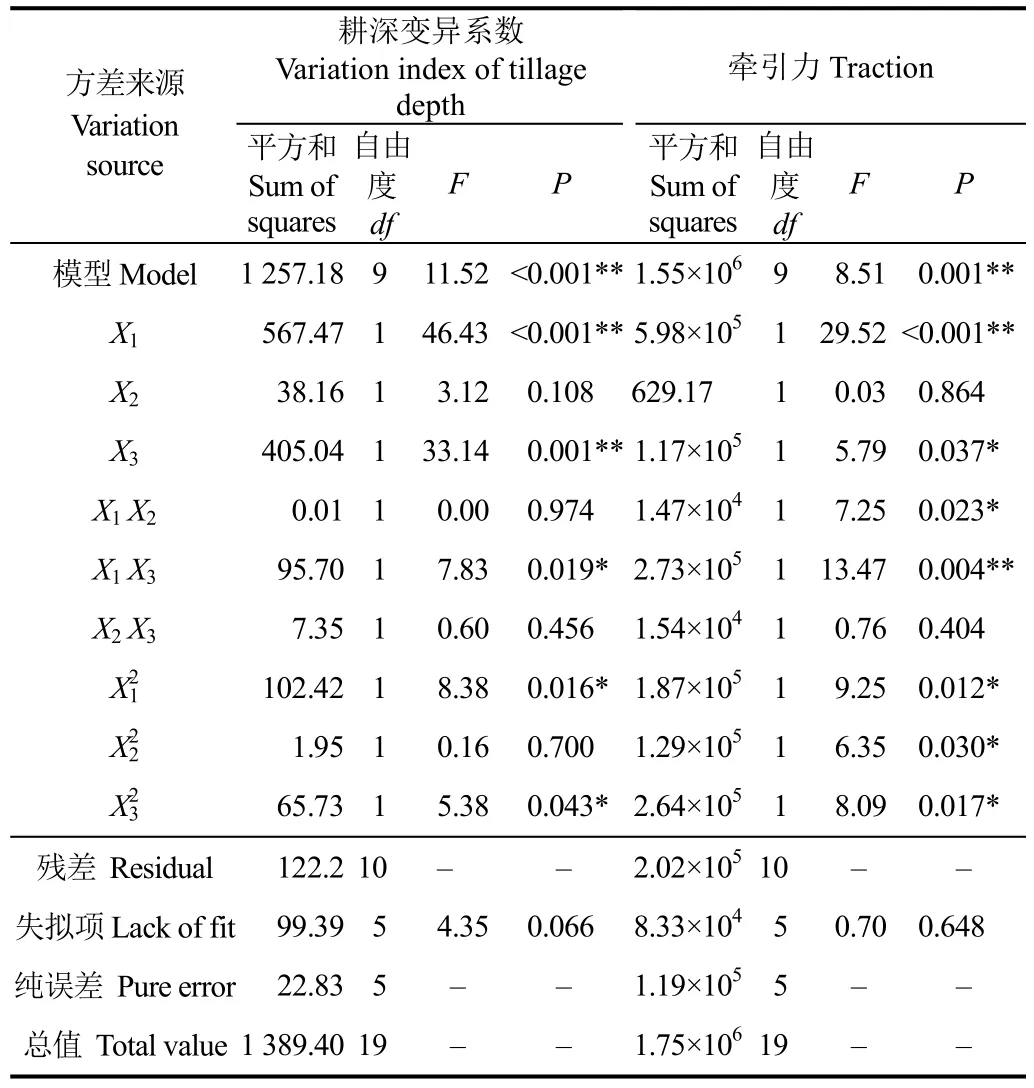
表3 回归模型显著性分析Table.3 Significant analysis of regression model
4.2.2 牵引力
土壤坚实度、作业速度、液压缸压力对牵引力的影响效果如图 7b,土壤坚实度、作业速度、液压缸压力对牵引力的关系均为下凹曲线,在极值点以前为正效应,极值点以后为负效应,土壤坚实度的极值点为0.9(实际值1.18 MPa),作业速度的极值点为0(实际值2.0 km/h),液压缸压力的极值点为0.4(实际值为3.2 MPa)。土壤坚实度、作业速度、液压缸压力对牵引力的扰动程度为土壤坚实度>液压缸压力>作业速度。
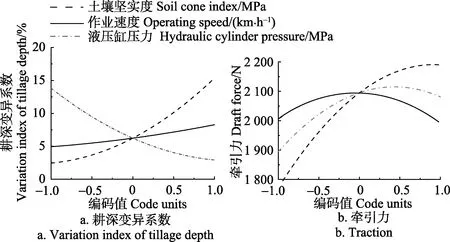
图7 单因子对耕深变异系数、牵引力影响效应Fig.7 Effect of single test factor on variation index of tillage depth and draft
4.3 交互因子对响应值的影响效果分析
土壤坚实度、作业速度、液压缸压力任意 2因子作为交互因子对耕深变异系数、牵引力的响应曲面及等高线图分别如图8、图9所示。
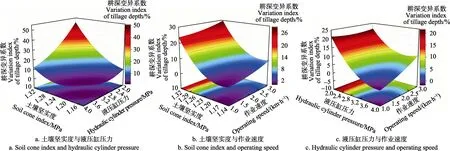
图8 交互因子对耕深变异系数的影响Fig.8 Effects of interactive factors on variation index of tillage depth
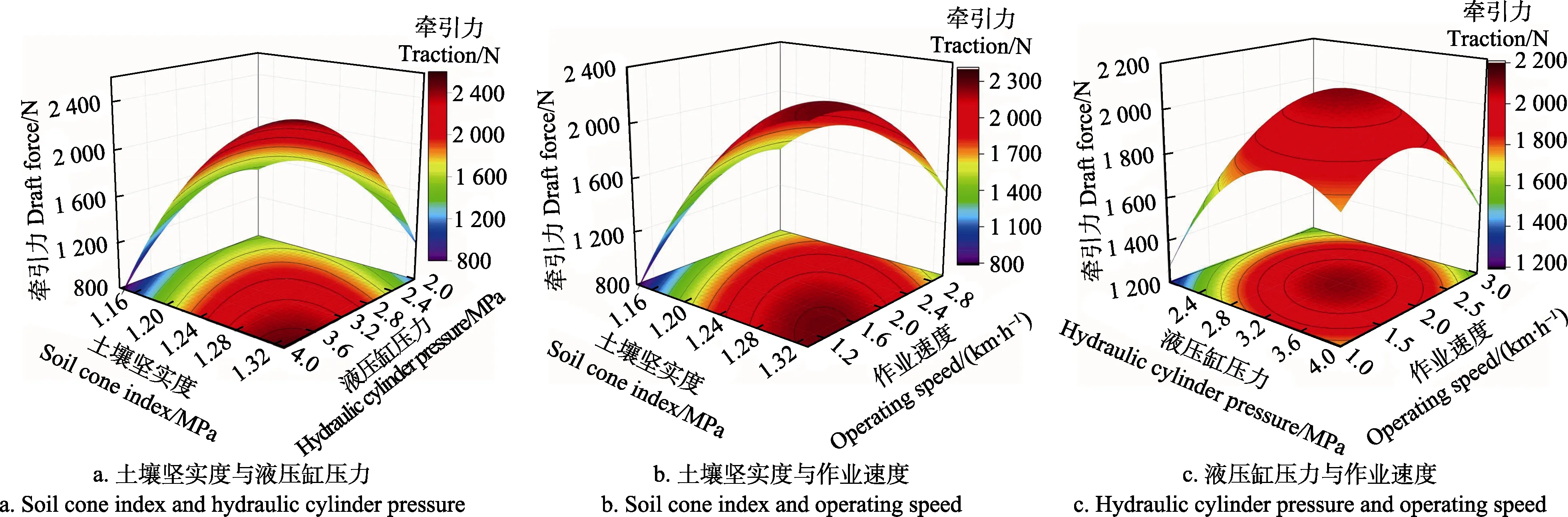
图9 交互因子对牵引力的影响Fig.9 Effects of interactive factors on traction
4.3.1 耕深变异系数
由图8a可知,耕深变异系数随土壤坚实度的增大而增大,随液压缸压力的增大而减小。土壤坚实度在1.28~1.32 MPa、液压缸压力在2.0~2.4 MPa范围内,耕深变异系数变化明显;土壤坚实度在1.13~1.28 MPa、液压缸压力在2.6~4.0 MPa范围内,耕深变异系数变化不明显。当土壤坚实度在 1.18~1.24 MPa、液压缸压力在 3.3~3.6 MPa范围内时,耕深变异系数有较小值。方差分析结果中土壤坚实度×液压缸压力(X1X3)项的P值为0.019,表明土壤坚实度、液压缸压力对耕深变异系数的影响有交互作用。由等高线图可知,耕深变异系数在土壤坚实度方向的变化速率与液压缸压力方向的变化速率相近,表明土壤坚实度、液压缸压力对耕深变异系数的影响程度相近。
由图8b可知,耕深变异系数随土壤坚实度、作业速度的增大而增大,土壤坚实度在1.26~1.32 MPa、作业速度在2.5~3.0 km/h范围内,耕深变异系数变化明显;土壤坚实度在1.14~1.23 MPa、作业速度在1.0~2.5 km/h范围内,耕深变异系数变化不明显。当土壤坚实度在1.14~1.20 MPa、作业速度在1.0~1.5 km/h范围内时,耕深变异系数有较小值。方差分析结果中坚实度×速度(X1X2)项的P值为0.974,表明土壤坚实度、液压缸压力对耕深变异系数的影响无交互作用。由等高线图可知,耕深变异系数沿土壤坚实度方向的变化速率较作业速度方向的变化速率大,表明土壤坚实度对耕深变异系数的影响程度大于作业速度。
由图8c可知,耕深变异系数随液压缸压力的增大而减小,随作业速度的增大而增大。液压缸压力在 2.0~2.8 MPa、作业速度在2.0~3.0 km/h范围内,耕深变异系数变化明显;液压缸压力在 3.2~4.0 MPa、作业速度在1.0~1.5 km/h范围内,耕深变异系数变化不明显。当液压缸压力在3.4~4.0 MPa、作业速度在1.0~1.5 km/h范围内时,耕深变异系数有较小值。方差分析结果中压力×速度(X3X2)项的P值为0.456,表明坚实度、压力对耕深变异系数的影响无交互作用。由等高线图可知,耕深变异系数沿液压缸压力方向的变化速率较作业速度方向的变化速率大,表明压力对耕深变异系数的影响程度大于速度。
4.3.2 牵引力
由图9a可知,牵引力随土壤坚实度、液压缸压力的增大而增大。土壤坚实度在1.13~1.20 MPa、液压缸压力在3.6~4.0 MPa范围内,牵引力具有较小值;当土壤坚实度在1.24~1.34 MPa、液压缸压力在2.8~4.0 MPa范围内时,牵引力具有较大值。方差分析结果中土壤坚实度×液压缸压力(X1X3)项的 P值为 0.004,表明土壤坚实度、液压缸压力对牵引力的影响存在明显交互作用。由等高线图可知,牵引力沿土壤坚实度方向的变化速率较液压缸压力方向的变化速率大,表明土壤坚实度对牵引力的影响程度比液压缸压力大。
由图9b可知,牵引力随土壤坚实度的增大而增大,随作业速度的增大而减小。土壤坚实度在 1.24~1.32 MPa、作业速度在1.0~2.8 km/h范围内,牵引力具有较大值;土壤坚实度在 1.13~1.20 MPa、作业速度在1.2~2.0 km/h范围内,牵引力具有较小值。当土壤坚实度在1.24~1.34 MPa、作业速度在1.2~2.4 km/h范围内时,牵引力具有较大值。方差分析结果中土壤坚实度×作业速度(X1X2)项的P值为0.023,表明土壤坚实度、作业速度对牵引力的影响存在明显交互作用。由等高线图可知,牵引力沿土壤坚实度方向的变化速率较作业速度方向的变化速率大,表明土壤坚实度对牵引力影响程度大于作业速度。
由图9c可知,牵引力的响应面随液压缸压力、作业速度变化呈凸面状,牵引力随液压缸压力、作业速度的增大先增大后减小。液压缸压力在2.8~3.6 MPa、作业速度在1.5~2.0 km/h范围内,牵引力具有较大值。方差分析结果中液压缸压力×作业速度(X3X2)项的P值为0.404,表明液压缸压力、作业速度对牵引力的影响无交互作用。由等高线图可知,牵引力沿液压缸压力方向的变化速率较作业速度方向的变化速率大,表明液压缸压力对牵引力影响程度大于作业速度。
4.4 回归模型验证试验
根据试验获得的回归模型,利用Design-Expert 8.0.6求解出耕深变异系数、牵引力同时较小时对应的参数组合为土壤坚实度为1.18 MPa、作业速度为1.4 km/h、液压缸压力为3.6 MPa。利用求解获得的参数组合对回归模型进行试验验证,采用同样的土壤制备方法,保证土壤含水率与前期试验条件相同。试验进行 3次重复,结果如表4所示。
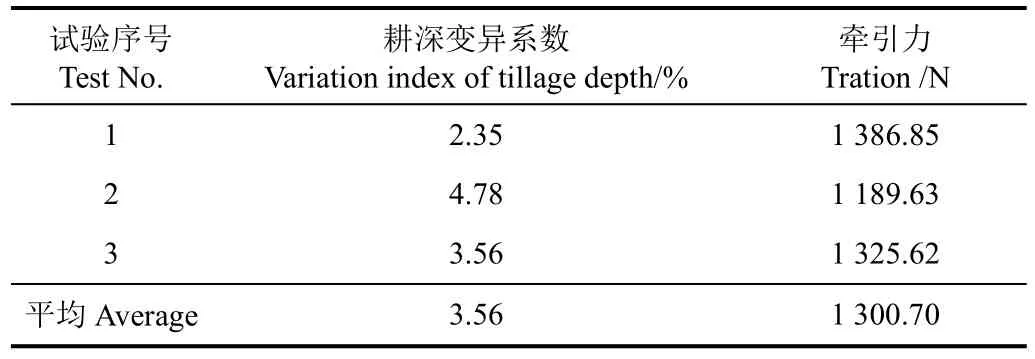
表4 验证试验结果Table 4 Result of verification test
结果表明,求解获得的参数组合得到的平均耕深变异系数为3.56%、平均牵引力为1 300.70 N,优于组合试验结果,验证了回归模型的可靠性。
5 讨 论
自激振动深松作业能够降低拖拉机牵引阻力,使拖拉机获得相对稳定的负荷,从而起到节能降耗的效果[11]。本文以增强自激振动深松作业对不同土壤条件的适应性为出发点,设计了液压激振源深松单体,其工作性能试验研究的评价指标仅涉及牵引力与耕深变异系数,未涉及系统能耗。但应考虑到,系统的供油来自拖拉机,系统工作时会引入拖拉机液压系统中的液压油,带来部分能量损失,从而增加系统的发热[28-30]。在液压系统中,压力损失是引起能量损失的主要部分,压力损失又分为沿程损失和局部损失 2种。沿程损失是由于液压油在较长管道中流动时因摩擦而产生的压力损失,局部损失是由于液压油在流经阀口时因截面形状突然发生变化或内部具有阻尼器而导致的压力损失。本文设计的液压系统,执行元件仅有液压缸,且无其他支路,管道连接相对简短,沿程损失较小,因此应着重从局部损失角度考虑系统的能量损失。在综合考虑减阻效果减少的能耗与拖拉机液压系统增加的能耗情况下,结合试验研究,对液压激振源深松单体的工作性能做出综合评价,同时为液压系统下一步优化改进提供指导。
6 结 论
本文主要得出以下结论:
1)提出了以液压为激振源的自激振动深松方法,设计了液压激振源的深松单体,设计了液压缸压力调控系统,实现液压缸压力连续、成比例调节。
2)通过对液压激振源深松单体进行力学和运动学分析,建立了深松单体力学和运动学模型,确定了液压缸的关键结构参数,缸径D=40 mm、行程S=130 mm。
3)设计了二次回归通用旋转组合试验,探明了土壤坚实度、作业速度、液压缸工作压力对液压激振源深松单体作业效果的影响规律,并建立了以耕深变异系数、牵引力为响应值的回归方程。
4)通过建立的回归方程求解出耕深变异系数、牵引力同时较小时对应的参数组合并进行试验验证,获得的耕深变异系数为3.56%,牵引力为1 300.70 N,优于组合试验结果,验证了回归模型的可靠性。
[1] 郑侃,何进,李洪文,等. 中国北方地区深松对小麦玉米产量影响的Meta分析[J]. 农业工程学报,2015,31(22):7-15.Zheng Kan, He Jin, Li Hongwen, et al. Meta-analysis on maize and wheat yield under subsoiling in Northern China[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(22): 7-15. (in Chinese with English abstract)
[2] 何进,李洪文,高焕文. 中国北方保护性耕作条件下深松效应与经济效益研究[J]. 农业工程学报,2006,22(10):62-67.He Jin, Li Hongwen, Gao Huanwen. Subsoiling effect and economic benefit under conservation tillage mode in Northern China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(10): 62-67. (in Chinese with English abstract)
[3] Romaneckas K, Šarauskis E, Avižienytė D, et al. The main physical properties of planosol in maize (Zea mays L.)cultivation under different long-term reduced tillage practices in the Baltic region[J]. Journal of Integrative Agriculture,2015, 14(7): 1309-1320.
[4] Hamzei J, Seyyedi M. Energy use and input–output costs for sunflower production in sole and intercropping with soybean under different tillage systems[J]. Soil Tillage Research, 2016,157: 73-82.
[5] Wells L G, Stombaugh T S, Shearer S A. Crop yield response to precision deep tillage[J]. Transaction of the ASAE , 2005,48(3): 895-901.
[6] 齐华,刘明,张卫建,等. 深松方式对土壤物理性状及玉米根系分布的影响[J]. 华北农学报,2012,27(4):191-196.Qi Hua, Liu Ming, Zhang Weijian, et al. Effect of deep loosening mode on soil physical characteristics and maize root distribution[J]. Acta Agriculturae Boreali-Sinica, 2012,27(4): 191-196. (in Chinese with English abstract)
[7] Williams J D, Wuest S B , Schillinger W F, et al. Rotary subsoiling newly planted winter wheat fields to improve infiltration in frozen soil[J]. Soil Tillage Research, 2006,86(2): 141-151.
[8] Raper R L, Reeves D W, Burt E C. Using in-row subsoiling to minimize soil compaction caused by traffic[J]. Journal of Cotton Science, 1998, 2(3): 130-135.
[9] Abu-Hamdeh N H. Compaction and subsoiling effects on corn growth and soil bulk density[J]. Soil Science Society of America, 2003, 67(4): 1213-1219.
[10] Yow J, Smith U J. Sinusoidal vibratory tillage[J]. Journal of Terramechanics, 1976, 13(4): 211-226.
[11] 邱立春,李宝筏. 自激式振动深松机减阻试验研究[J]. 农业工程学报,2000,16(6):72-76.Qiu Lichun, Li Baofa. Experimental study on the self-excited vibration subsoiler for reducing draft force[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2000, 16(6): 72-76. (in Chinese with English abstract)
[12] Bernsten R. Tine forces established by a two-level model and the draught requirement of rigid and flexible tines[J]. Soil Tillage Research, 2006, 90: 230-241.
[13] Mouazen A M, Duerinckx K, Ramon H, et al. Soil influences on the mechanical actions of a flexible spring tine during selective weed harrowing[J]. Biosystems Engineering, 2007,96(1): 7-18.
[14] 张军昌,闫小丽,林泽坤,等. 自激振动深松整地机设计与试验[J]. 农业机械学报,2016,47(9):44-49.Zhang Junchang, Yan Xiaoli, Lin Zekun, et al. Design and experiment of self-exciting vibration deep-loosening and sub-soiling machine. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 44-49. (in Chinese with English abstract)
[15] 崔涛,史智栋,杨丽,等. 弹簧预紧力可调式振动深松机设计与试验[J]. 农业机械学报,2016,47(9):96-102.Cui Tao, Shi Zhidong, Yang Li, et al. Design and experiment of vibration subsoiler with adjustable spring pre-tightening force[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(9): 96-102. (in Chinese with English abstract)
[16] 董伟亮. 液压设计手册[M]. 北京:机械工业出版社,2005:256-372.
[17] Mouazen A M, Ramon H. A numerical–statistical hybrid modelling scheme for evaluation of draught requirements of a subsoiler cutting a sandy loam soil, as affected by moisture content, bulk density and depth[J]. Soil Tillage Research,2002, 63(3): 155-165.
[18] Mouazen A M, Duerinckx K, Ramon H, et al. Soil influences on the mechanical actions of a flexible spring tine during selective weed harrowing[J]. Biosystems Engineering, 2007,96(1): 7-18.
[19] 孙成奇. 理论力学[M]. 北京:高等教育出版社,2009:28-58.
[20] 李霞,付俊峰,张东兴,等. 基于振动减阻原理的深松机牵引阻力的试验[J]. 农业工程学报,2012,28(1):32-36.Li Xia, Fu Junfeng, Zhang Dongxing, et al. Experiment analysis on traction resistance of vibration subsoiler[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(1): 32-36. (in Chinese with English abstract)
[21] 李霞,张东兴,王维新,等. 受迫振动深松机性能参数优化与试验[J]. 农业工程学报,2015,31(21):17-24.Li Xia, Zhang Dongxing, Wang Weixin, et al. Performance parameter optimization and experiment of forced-vibration subsoiler[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(21): 17-24.(in Chinese with English abstract)
[22] 李艳龙,刘宝,崔涛,等. 1SZ-460 型杠杆式深松机设计与试验[J]. 农业机械学报,2009,40:37-40.Li Yanlong, Liu Bao, Cui Tao, et al. Design and field experiment on 1SZ -460 lever-type subsoiler[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40: 37-40. (in Chinese with English abstract)
[23] 赵佳乐,贾洪雷,郭明卓,等. 免耕播种机有支撑滚切式防堵装置设计与试验[J]. 农业工程学报,2014,30(10):18-28.Zhao Jiale, Jia Honglei, Guo Mingzhuo, et al. Design and experiment of supported roll-cutting anti-blocking mechanism with for no-till planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014,30(10): 18-28. (in Chinese with English abstract)
[24] 陶桂香,衣淑娟,汪春,等. 水稻钵盘精量播种机充种性能试验[J]. 农业工程学报,2013,29(8):44-50.Tao Guixiang, Yi shujuan, Wang Chun, et al. Performance experiments of bowl dish precision seeder for rice in filling processing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 44-50. (in Chinese with English abstract)
[25] 孙亚朋,董向前,宋建农,等. 振动深松试验台作业参数减阻减振优化[J]. 农业工程学报,2016,32(24):43-49.Sun Yapeng, Dong Xiangqian, Song Jiannong, et al. Parameter optimization of vibration subsoiler test bed for reducing resistance and vibration[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2016, 32(24): 43-49. (in Chinese with English abstract)
[26] 康建明,李树君,杨学军,等. 正弦指数曲线型开沟刀片结构参数优化[J]. 农业机械学报,2016,47(11):91-99.Kang Jianming, Li Shujun, Yang Xuejun, et al. Structure parameters optimization of sine exponential curve type ditching blade[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 91-99. (in Chinese with English abstract)
[27] 深松机作业质量,NY/T 2845-2015[S]. 2015.
[28] 雷秀,赵凯亮,倪 萌,等. 液压系统能量损失与节能对比分析[J]. 机床与液压,2012,40(2):30-34.Lei Xiu, Zhao Kailiang, Ni Meng, et al. Analysis of energy loss and energy-saving contrast on hydraulic system[J].Machine tool and Hydraulics, 2012, 40(2): 30-34. (in Chinese with English abstract)
[29] 苏华礼,徐铭,马慧民. 液压系统的发热与对策分析[J]. 机床与液压,2008,36(6):179-191.
[30] 姚静,任旭辉,曹晓明,等. 开式变量泵控快锻油压机系统能耗特性实验研究[J]. 中国机械工程,2017,28(4):462-469. (in Chinese with English abstract)Yao Jing, Ren Xuhui, Cao Xiaoming, et al. Experimental study on energy consumption characteristics of fast hydraulic foring press with open variable pump controller system[J].China Mechanical Engineering, 2017, 28(4): 462-469. (in Chinese with English abstract)