基于卡尔曼滤波融合算法的深松耕深检测装置研究
2020-10-10蒋啸虎马云海李金光吴宝广孙霁宇
蒋啸虎 佟 金 马云海 李金光 吴宝广 孙霁宇
(1.吉林大学生物与农业工程学院, 长春 130022; 2.宾夕法尼亚州立大学农业科学与工程学院, 斯泰特克里奇 PA 16802; 3.吉林大学工程仿生教育部重点实验室, 长春 130022)
0 引言
耕深是翻耕土壤时的一项重要技术指标,不同耕作方式、不同土壤类型、不同作物对耕深的要求均不相同[1-6],耕深对作物根系生长、机具作业能耗和作业质量有重要影响[7-10]。因此,准确检测耕深对评估作物长势、实时调节耕深具有重要意义,可为建设高标准农田提供数据支撑。
耕深检测最初采用手工测量,但手工测量效率低,不能进行连续检测[11]。随着电子技术的发展,各种传感器被用于耕深检测,如超声波传感器、红外传感器等通过测量机架与地面之间的距离检测耕深[12-14],倾角传感器、编码器等通过机架角度的变化及几何关系间接测量耕深[15-17]。土壤耕作时环境复杂,地表秸秆覆盖、地表的起伏以及土块等均会使超声波传感器接收回波存在误差,导致耕深检测不准确[18];倾角传感器检测耕深需利用仿形轮连杆角度变化或机架角度变化测量耕深,前者易受地形影响,后者在拖拉机改变悬挂方式时,由于几何关系产生变化需要重新标定传感器,且不便于在其他型号机具上使用,通用性差[19]。
目前,耕深检测装置大多采用单一传感器,易受环境影响,且检测精度较低。为提高耕深检测精度、减小环境对耕深检测的影响,本文采用两传感器联合检测耕深,即基于超声波传感器、红外传感器设计一种耕深检测装置,并利用卡尔曼滤波方法将两种传感器的检测数据进行滤波融合。
1 耕深检测装置设计
1.1 传感器选取
传感器是检测装置的关键部件,本耕深检测装置选取AJ-SR04M型超声波传感器和GP2Y0A21YK0F型红外传感器,两传感器的指标参数如表1所示。工作时两传感器固定于机架下方,通过测量机架至地面的距离获取耕深数据。
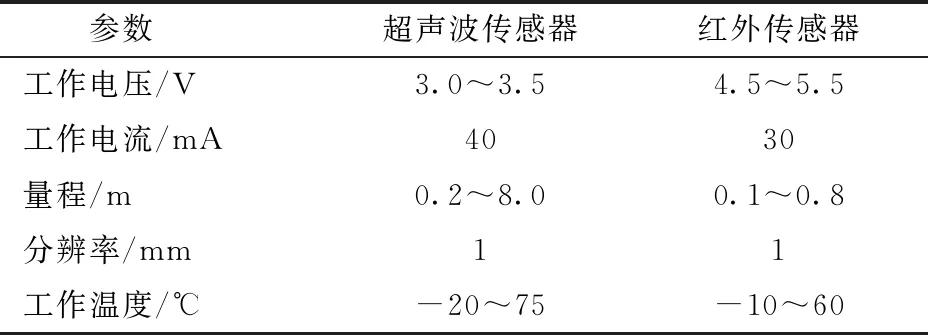
表1 传感器指标参数Tab.1 Parameters of sensors
1.2 耕深检测原理
超声波传感器采用渡越时间法测量耕深,图1为超声波传感器测量耕深的原理图。在深松作业前可通过标定提前测量超声波传感器发射端面至铲尖的距离h1,深松作业时超声波传感器向地面发射超声波并接收由地面反射的回波,通过记录每次发射超声波到接收回波的时间间隔Δt,便可计算出超声波传感器发射端面至地面的距离h2,即
(1)
式中vu——超声波在空气中传播的速度
由此可知耕深h0为
(2)

图1 超声波传感器耕深测量原理图Fig.1 Principle diagram of ultrasonic sensor detecting tillage depth
红外传感器通过直射式三角测距法测量耕深,其测量原理图如图2所示。

图2 红外传感器耕深测量原理图Fig.2 Principle diagram of infrared sensor detecting tillage depth
根据Scheimpflug定律可知[20-21],当PQ为红外传感器的参考平面,此时红外发射器至参考平面的距离l0、像距l1、物距l2、反射光线与入射光线的夹角α以及反射光线与红外接收器的夹角β均为已知。在利用红外传感器测量耕深时,当测量到被测平面P′Q′与参考平面PQ的距离y时,可知红外传感器与被测平面的距离为y+l0,当被测平面与参考平面不重合时,反射光线在红外接收器所呈的像会产生位移x,该位移x可由红外传感器直接测量得到,根据几何关系可知
(3)
因此红外传感器测量耕深h0为
(4)
1.3 装置样机
通过3D打印技术制作耕深检测装置的壳体,其整体尺寸(长×宽×高)为12 cm5 cm4 cm。选取STM32F103C8T6单片机作为该耕深检测装置的处理器,STM32F103C8T6单片机具有40个引脚,除能满足传感器的控制连接外,多余引脚能用于后续功能扩展。为方便耕深检测装置的操作和数据显示,选用5英寸电容触摸屏(TJ8048T050_011R型)作为该装置的显示屏,该显示屏通过串口与处理器连接,通过该触摸屏可直接向处理器发送相关指令。同时该检测装置安装有存储芯片(AT24C02型),可存储耕深检测数据以便进一步研究。耕深检测装置样机如图3所示。

图3 耕深检测装置样机Fig.3 Prototype of tillage detecting device
2 基于卡尔曼滤波的传感器数据滤波融合
卡尔曼滤波以及数据融合能够从一系列的不完全及包含噪声的测量数据中综合估计系统的状态,并且由于每次迭代只计算最新的测量数据,因此处理效率极高,被广泛运用于工程、农业等领域[12, 22-24]。图4是该耕深检测装置的工作流程图,本文采用卡尔曼分布式融合测量[22,25-26],由前文的分析可知,测量传感器至地面的距离是准确测量耕深的关键,因此设传感器至地面的距离为该耕深检测装置的状态量x,则系统预测方程为
(5)

Ai——状态转移矩阵,本文Ai=[1]
i=1时表示超声波传感器,i=2时表示红外传感器。
预测协方差为
(6)

图4 耕深检测装置工作流程图Fig.4 Flow chart of tillage depth detecting device
Pt-1,i——t-1时刻系统状态协方差
Qi——系统过程噪声,Q1=0.5,Q2=0.2
完成系统的预测后,可计算卡尔曼增益
(7)
式中Kt,i——卡尔曼增益值
Hi——系统观测矩阵,Hi=[1]
Ri——观测噪声方差,R1=15,R2=10
因此,系统最优估计值为
(8)
zt,i——传感器在时刻t的测量值
在完成系统估计值后,对系统协方差进行更新
(9)
式中Ii——单位矩阵
在同一地块进行深松作业时一般要求耕深保持不变,即在作业前需提前设置预定耕深h′,该耕深检测装置可计算超声波传感器和红外传感器检测数据与预定耕深h′的偏差δt,i,即
δt,i=t,i-h′
(10)
通过计算偏差平方和来确定两传感器的加权因子ωt,i,即
(11)
(12)
由此可得在t时刻的耕深融合值
xt=t,1ωt,1+t,2ωt,2
(13)
通过循环执行计算式(5)~(13),即可得到超声波传感器和红外传感器在各时刻的滤波数据和融合数据。
3 室内试验
3.1 耕深检测装置静态标定试验
为检验该耕深检测装置超声波传感器、红外传感器及其滤波融合后测量数据的准确性,对耕深检测装置进行静态标定。利用镇压辊将土壤压实平整后,分别将传感器与地表距离设置为25、30、35、40、45、50 cm进行检测。完成平整地的静态标定后,在地表均匀覆盖秸秆然后在上述不同高度分别进行测量。
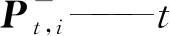
静态标定测量数据如表2所示,在无秸秆覆盖的平整地面,超声波传感器最大测量误差1.16 cm,平均误差为0.83 cm,均方根误差为0.86 cm。由表2可知,在平整地面超声波传感器测量数据整体略大于实际测量距离,这是由于超声波传感器采用渡越时间法测距,而单片机在处理指令时需要额外的时间,造成时间间隔Δt大于超声波实际传播时间,由式(1)可知,此时超声波测量距离大于实际距离。红外传感器最大测量误差为0.60 cm,平均误差为0.09 cm,均方根误差为0.41 cm。由表2可知,红外传感器测量数据在实际距离附近略有波动,这是由于红外传感器采用的三角测量法不受测量时间的影响,但是红外传感器本身的零点漂移等造成了数据的波动。平整地面滤波融合数据的最大测量误差为0.66 cm,平均误差为0.20 cm,均方根误差为0.40 cm。滤波融合数据的检测精度优于超声波传感器的检测精度,与红外传感器测量数据较为接近。
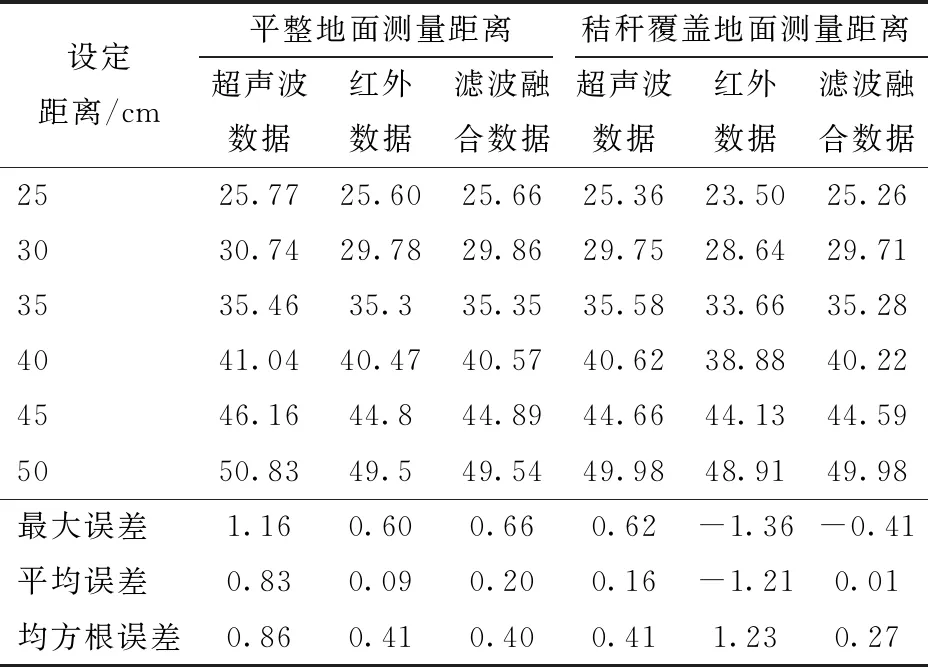
表2 耕深检测装置静态标定试验结果Tab.2 Experiment results of static calibration of tillage depth detecting device cm
在秸秆覆盖地面,超声波传感器最大测量误差为0.62 cm,平均误差为0.16 cm,均方根误差为0.41 cm。红外传感器最大测量误差为-1.36 cm,平均误差为-1.21 cm,均方根误差为1.23 cm。由于覆盖在地面的秸秆具有一定厚度,导致两传感器所测量的距离小于实际设定的距离,因此红外传感器测量数据均小于实际设定距离,而超声波传感器在测距时有额外的时延,弥补了秸秆覆盖所带来的测量偏差。此时两传感器滤波融合数据的最大测量误差为-0.41 cm,平均误差为0.01 cm,均方根误差为0.27 cm,融合数据的精度优于红外传感器的测量精度,其测量值与超声波传感器测量值接近。
由于耕深检测装置各元件数据传输和环境影响,超声波传感器和红外传感器并不能在平整地面和秸秆覆盖地面均保证良好的测量精度,而经卡尔曼滤波融合算法处理后的数据在两种测量环境下均有较好的测量精度。
3.2 耕深检测装置动态工作性能试验
为检验该耕深检测装置的动态工作性能,在吉林大学农机实验室进行了动态测量试验。超声波传感器和红外传感器安装于深松机架下部(图5),深松机具由土槽台车牵引前进。试验时机具前进速度为3.6 km/h,耕深分别设置为30、35、40、45 cm。在试验研究耕深检测装置在平整地面的性能后,将地面均匀铺上秸秆,在上述相同条件下进行耕深检测装置在秸秆覆盖地面的性能试验(图6)。土槽台车工作时在轨道上行驶,且采用电力驱动,因此行驶稳定、振动小,其牵引的深松铲耕深十分稳定,试验测量表明其实际耕深与设定耕深保持一致,因此用设定耕深作为实际耕深进行分析。

图5 耕深检测装置平整地面性能试验Fig.5 Performance experiment of tillage depth detecting device in leveling ground1.土槽台车 2.深松机架 3.红外传感器 4.超声波传感器 5.深松铲

图6 耕深检测装置秸秆地面性能试验Fig.6 Performance experiment of tillage depth detecting device in straw mulching ground1.深松机架 2.红外传感器 3.超声波传感器 4.深松铲
图7 平整地面耕深变化曲线Fig.7 Tillage depth variation curves in leveling ground
图7为耕深检测装置在平整地面耕深变化曲线,由图可知,超声波传感器和红外传感器的原始数据波动较大,经过滤波后的检测数据较原始数据平滑,滤除了无用的杂波。在平整地检测时,超声波所检测的传感器至地面的距离h2大于实际距离,根据式(2)可知,滤波后超声波检测数据均小于实际耕深, 其在30、35、40、45 cm耕深处与实际耕深的最大偏差分别为-1.33、-1.37、-1.32、-1.34 cm;而滤波后的红外传感器测量数据在设定耕深附近波动,滤波后红外传感器检测数据在30、35、40、45 cm耕深处与实际耕深的最大偏差分别为-0.33、0.27、-0.17、0.18 cm。融合后的检测数据与滤波后红外传感器数据接近,在30、35、40、45 cm耕深处与实际耕深的最大偏差分别为-0.40、-0.24、-0.19、-0.20 cm;可知在平整地面检测耕深时,超声波检测数据与实际耕深偏差较大,红外传感器检测数据与实际耕深偏差较小,融合后的数据接近红外数据,与设定耕深相差较小。
图8是耕深检测装置在秸秆覆盖地面的耕深变化曲线,在秸秆覆盖地面超声波滤波数据和实际数据较为接近,其在30、35、40、45 cm耕深处与实际耕深的最大偏差分别为0.28、-0.18、-0.20、0.24 cm;而红外传感器滤波数据均大于设定耕深,其在30、35、40、45 cm耕深处与实际耕深的最大偏差分别为1.66、1.62、1.59、1.63 cm。融合后的检测数据与滤波后超声波传感器数据接近,其在30、35、40、45 cm耕深处与实际耕深的最大偏差分别为0.32、0.40、0.33、0.28 cm。
在秸秆覆盖地面,超声波检测数据与实际耕深相差不大,红外检测数据大于设定耕深且偏差较大,融合后数据接近超声波传感器数据,与预定耕深相差不大。
耕深检测装置动态试验表明,超声波传感器和红外传感器分别在秸秆覆盖地面和平整地面有较好的性能,而数据融合算法能够根据传感器测量数据与设定耕深间的偏差进行数据融合,使融合后数据接近实际耕深。

图8 秸秆覆盖地面耕深变化曲线Fig.8 Tillage depth variation curves in straw mulching ground
4 田间试验
在进行实际深松作业时,田间工作环境比实验室土槽环境更为复杂多变。为了研究该耕深检测装置在田间的实际工作性能,在石家庄市藁城区进行了耕深检测装置的田间测试试验(图9)。
在田间作业时拖拉机行驶(图9)稳定性不如土槽台车,深松铲实际耕深与设定耕深有一定偏差,因此试验时采用人工每隔1 m测量实际耕深(图10)。并计算深松深度变异系数V来判断深松深度的稳定性,深松深度变异系数V计算式为[27]
(14)

Xi——第i个测量点的深松深度,cm
n——深松深度测量点数

图9 耕深检测装置田间试验Fig.9 Experiment of tillage depth detecting device in field1.耕深检测装置 2.拖拉机 3.红外传感器 4.超声波传感器 5.机架 6.深松铲

图10 人工测量耕深Fig.10 Detecting tillage depth manually
在设定耕深为30 cm和40 cm时,实际平均耕深为30.16 cm和40.28 cm,深松深度变异系数为1.79%和1.88%,可知实际深松深度有一定波动。由图11可知,在田间工作过程中超声波传感器和红外传感器的检测数据均有较大的波动和起伏,在设定耕深为30 cm和40 cm时,超声波传感器滤波数据的平均值为29.51 cm和38.79 cm,深松深度变异系数为2.51%和3.10%。

图11 田间试验耕深变化曲线Fig.11 Tillage depth-time curves in field
红外传感器测量数据的平均耕深为32.06 cm和41.52 cm,深松深度变异系数为2.41%和2.76%。因此,在实际作业情况下,超声波传感器和红外传感器测量只有部分数据与实际耕深接近,而整体波形变化与实际耕深有较大偏差,无法正确测量耕深和反映耕深变化趋势。在设定耕深为30 cm和40 cm时,融合后平均测量耕深为30.06 cm和39.95 cm,深松深度变异系数为1.07%和1.00%,接近实际耕深,且融合后的数据能准确反映实际耕深变化趋势。
5 结论
(1)采用超声波传感器和红外传感器综合检测耕深,并采用卡尔曼滤波融合算法将两传感器的数据进行融合,能够充分利用两传感器在不同环境下的有效检测数据,为实时、准确检测耕深提供了一种新方法和新思路。
(2)在平整地面检测耕深时,超声波传感器检测值与实际耕深最大偏差为-1.37 cm,红外传感器检测值与实际耕深最大偏差为-0.33 cm。在秸秆覆盖地面检测耕深时,超声波传感器检测值与实际耕深最大偏差为0.28 cm,红外传感器检测值与实际耕深最大偏差为1.66 cm。
(3)采用卡尔曼滤波融合的数据在平整地和秸秆覆盖地面均有较高的检测精度。当设定耕深为30 cm和40 cm时,融合后数据的平均测量耕深分别为30.06 cm和39.95 cm,深松深度变异系数分别为1.07%和1.00%,滤波融合数据能够准确检测耕深,并准确反映耕深的变化趋势。
