整个非干涉光场的相位检索算法研究
2018-05-21吴海燕
吴海燕
(安徽三联学院,安徽 合肥 230601)
3D光场重构技术需要预先获取场景的深度信息,但是光场的振荡频率极高,常规光学传感器只能记录光场强度,丢失了包含物体形状细节和深度等的相位信息。相位检索技术是指利用直接测量得到的强度信息通过计算的方法得到相位,为全光场重构进而实现3D显示提供所需要的数据信息。经典的非干涉相位恢复技术通过求解强度传输方程(Intensity Transport Equation,TIE)从强度中恢复相位,在相干光场中获得了广泛应用。还有一种经典算法是迭代算法。其中,迭代相位恢复使用物面和像面的强度数据来恢复输入和输出平面上的光场相位分布[1],多数时候能够很快地收敛并得到误差较小的结果,但在实际计算中,情况并不是很理想。强度传输方程是Teague[2]于1983 年由亥姆霍兹方程在傍轴近似下首次推导得到的。该方法不是通过传统的衍射计算公式来迭代恢复相位,而是在光强轴向微分以及光强分布已知的情况下,通过数值求解光强传输方程直接地获取相位信息,从而不需要任何的迭代求解过程,但是只适合近场。所以这些经典的算法各自存在优缺点,还有很大的改进空间。
基于两种算法的适用情况,从整个衍射光场出发,本文提出了不同距离的衍射光场的相位检索算法模型,探索了适合整个非干涉光场的相位检索算法的分类。我们根据菲涅尔数[3]将整个衍射光场分为近场、中场和远场。在衍射光场的近场采用TIE方程来获取相位的确定解,中场用TIE方程与角谱迭代[4]融合的方法来恢复相位信息,而在远场直接采用角谱迭代方法来获取相位信息。实验证明不同区域用不同的方法就可以将整个非干涉光场的相位很好的恢复出来。
1 非干涉光场相位恢复算法
1.1 TIE方程与菲涅尔数
在菲涅尔场相位恢复可以用下面的关于φ(x,y)非线性完整方程来描述:
方程(2)就是菲涅尔积分,λ=2π/k是波长,U0(x,y)=A(x,y)exp{iφ(x,y)}是物体平面上的未知复振幅,IR(x,y)是测量中在图像平面z=R处的强度分布值(如图1所示)。物体平面强度为I0(x,y)≡|A(x,y)|2。
上式(2)可以展开成一个收敛的幂级数:

(3)

Fr[A,φ,λ,R]≈exp(ikR)[U0(x,y)

(4)
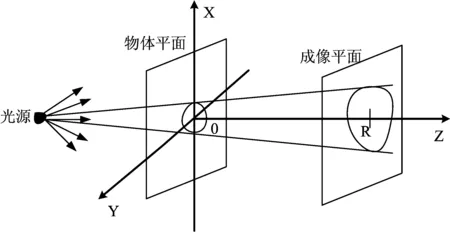
图1 相位恢复算法实验示意图
方程(4)描述了从物体平面z=0到图像平面z=R之间的自由空间传播,但是要满足条件R<
-h·[I0(x,y)hφ(x,y)]≅(2πNF)[IR(x,y)]
(5)
方程(5)可以用来求解相位信息,如公式所示,只要知道物体的强度分布I0(x,y)和图像平面的强度分布IR(x,y),就可以根据方程(5)求解相位φ(x,y)。然而,方程(5)是限制在菲涅尔数NF>>1或传播距离R<
1.2 角谱迭代算法
根据平面角谱传播理论,用U1表示物平面的复振幅函数:
U1(x1,y1)=ρ1(x1,y1)exp[iφ1(x1,y1)]
(6)
而用U2表示成像平面的复振幅函数:
U2(x2,y2)=ρ2(x2,y2)exp[iφ2(x2,y2)]
(7)
根据角谱传播理论,利用角谱传递函数就可以衍射计算出物平面和像平面光场。该算法在相同条件下,传播距离越远效果越好,这点在后面实验部分会验证。所以该算法适合衍射光场的远场相位计算。该算法的初始相位是设定的随机相位,在后面的实验中用到的TIE+角谱迭代算法是用TIE方程解出的相位作为该算法的初始相位。算法的流程图如图2所示。
2 整个非干涉光场的相位检索
2.1 整个非干涉光场相位检索算法分类
由上述TIE方程推导求解过程可以知道,TIE方程只适合于近场。根据菲涅尔数NF来划分整个衍射光场,再根据不同相位检索算法的优缺点,将整个非干涉光场的相位检索分为三类,如表1所示。
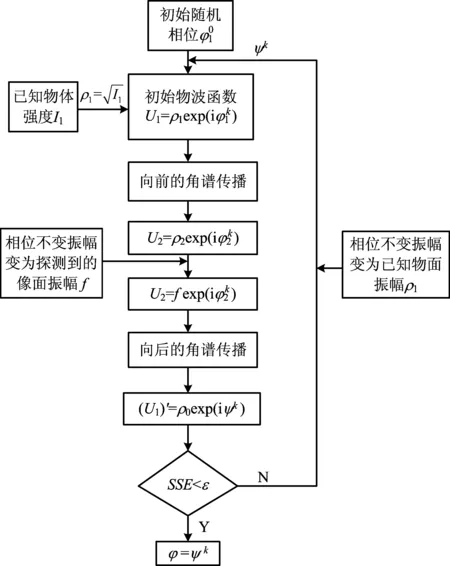
图2 角谱迭代算法流程图

Fresnel数NF远大于1NF约为1NF远小于1区域(物体到图像的距离)近场(geometric)中间场(Fresnel)远场(Fraunhofer)相位线性性(图像对比度的本质)线性(Laplacian)准线性(hologram)非线性(diffractionpattern)相位恢复方法TIETIE+角谱迭代角谱迭代
2.2 模拟实验验证与分析
假设图3是物体的相位,其相位值为[-0.45π,0.9π],采样间隔h=10-5,波长λ=10-10m,假定物体平面的强度分布是均匀的,即I0(x,y)≡1。整个模拟实验采用MATLAB软件仿真实现。

图3 假想物体相位
2.2.1 近场衍射区域的相位恢复实验
近场区域,NF>>1或z<

图4 衍射的近场区域不同距离TIE的恢复结果
2.2.2 中场衍射区域的相位恢复实验
将菲涅尔近场与夫朗和费之间的区域称之为中场衍射区域,即NF≈1,可以求出传播距离z≈1m。同样,取1m左右的三个传播距离:z=0.1m,1m,10m。为了证明在中场采用TIE+角谱迭代方法效果最好,做了三组实验对比。图5是在中场使用TIE方程的方法,从结果来看,传播距离远的时候效果很差,与TIE只适合近场的结论相符,所以该区域不适合用TIE方程的方法。在同样的距离情况下单独用迭代角谱来恢复相位信息,分别迭代100次,可以得到如图6所示结果,而且传播距离越远效果越好。由于角谱迭代适用于远场,所以在这个区域效果不是最好的。
因此,可以将TIE得到的相位作为迭代角谱的初始输入相位,即采用TIE+角谱迭代的方法,迭代100次,相位恢复的结果如图7所示,与上面的图5和图6相比较可以看出结果是最好的。于是,在中场区域,采用TIE与角谱迭代融合的方法恢复相位信息。

图5 衍射中场区域不同距离TIE的相位恢复结果
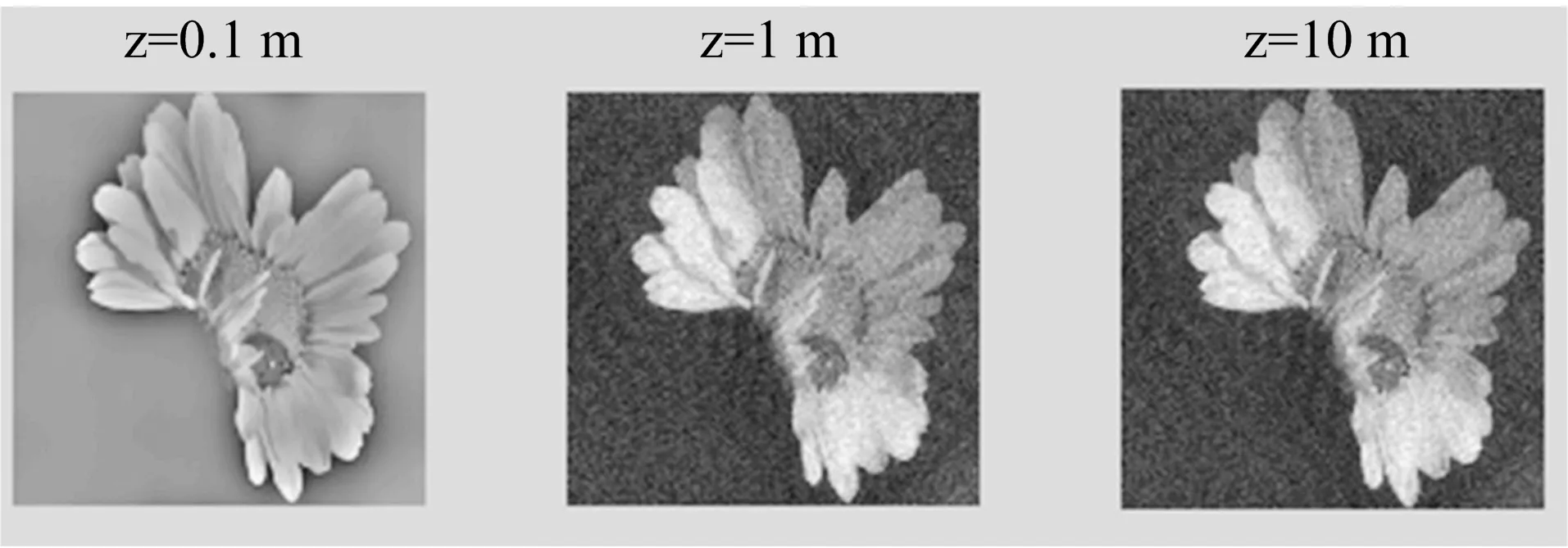
图6 衍射中场区域不同距离迭代角谱的相位恢复结果
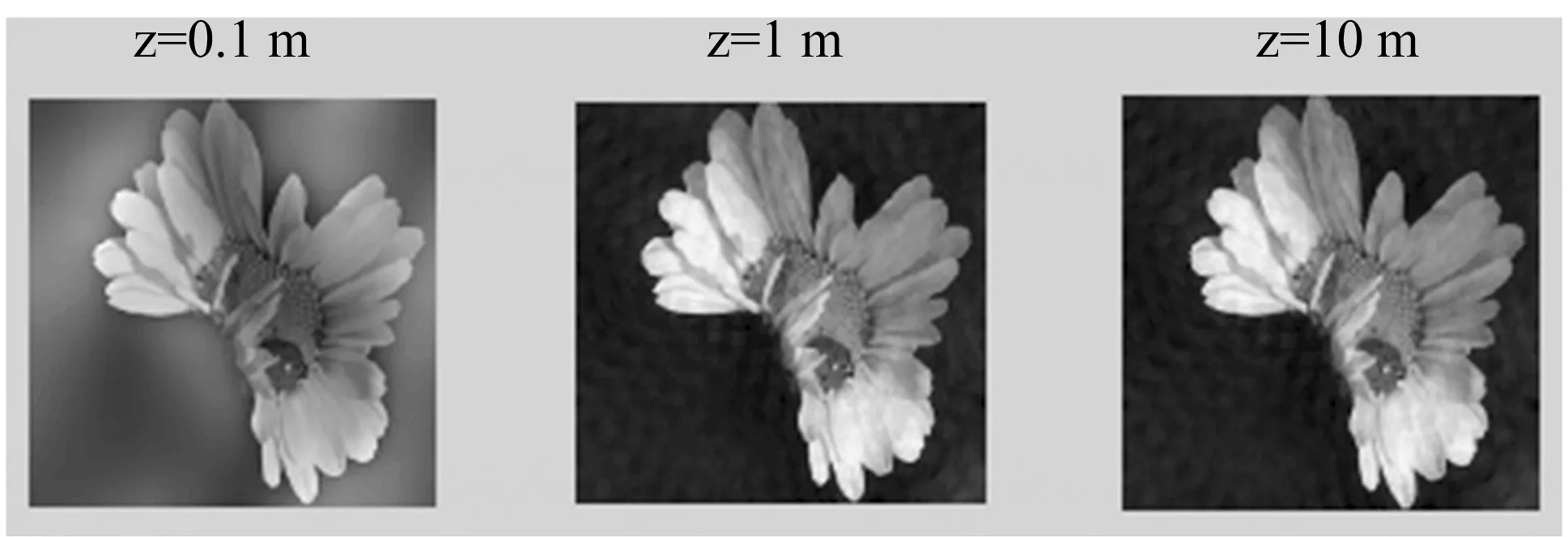
图7 衍射中场区域不同距离TIE+迭代角谱的相位恢复结果
2.2.3 远场衍射区域的相位恢复实验
在远场区域,即夫朗和费区,NF<<1,可以计算出z>>1m,我们取远远大于1m的2个距离:z=100m,1000m。TIE方程方法不适合使用,而迭代角谱方法适合远场区域,所以用迭代角谱方法迭代100次就可以得到较不错的结果,如图8所示。
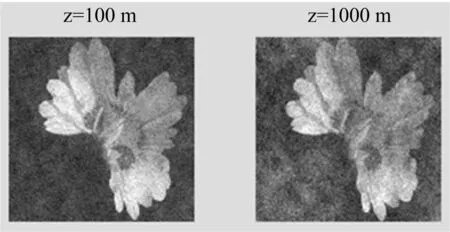
图8 衍射远场区域不同距离迭代角谱的相位恢复结果
综上所述,模拟实验证明在不同衍射光场区域用不同的相位恢复算法就可以将整个衍射光场的相位很好地恢复出来,结果如图4、图7、图8所示。
2.2.4 两种算法在时间上的比较
TIE方程的解法只是数值计算,用MATLAB求解速度较快,而角谱迭代算法收敛速度相对较慢。两种算法在时间上的比较如表2所示。所以,TIE方程方法在计算时间上占明显优势而角谱迭代算法相对要牺牲较多的时间。

表2 算法时间比较
3 结论
非干涉光场的相位恢复算法主要有求解TIE方程和迭代算法两种,前者适用于衍射近场区域而后者适用于衍射远场区域。两种算法各有缺点,为了得到更好的结果也可以将两者结合起来,即将求解TIE方程得到的相位值作为迭代算法的迭代初始值。笔者从整个非干涉光场角度出发,讨论了适合整个非干涉光场的相位检索的算法模型,而且用模拟实验验证了该算法模型,该算法模型对整个衍射场的相位都作出了很好的恢复。
参考文献:
[1]K.A.Nugent.The Measurement of Phase through the Propagation of Intensity: an Introduction[J].Contemporary Physics,2011,52(1):55-69.
[2]M.R.Teague Deter.Ministic Phase Retrieval: a Green’s Function Solution[J].J Opt Soc Am, 1983(73):1434-1441.
[3]黄利新,姚新,蔡冬梅,等.一种快速高精度的相位恢复迭代法[J].中国激光,2010,37(5):1218-1221.
[4]程鸿,章权兵,韦穗,等.基于强度传输方程的相位检索[J].光子学报,2011,40(10):1566-1570.
[5]王潇,毛珩,赵达尊.基于光强传播方程的相位恢复[J].光学学报,2007,27(12):2117-2121.
[6]J.R.Fienup.Phase Retrieval Algorithms: A Comparison [J].Appl.Opt,1982(21): 2758-2769.
[7]程鸿,沈川,张成,等.强度传输方程和角谱迭代融合的相位检索算法[J].中国激光,2014(6):187-192.
