浅析一种悬吊曲线轨道机器人系统
2018-03-09滕建新刘勤山覃博文
滕建新 刘勤山 覃博文


【摘 要】 介绍广州市广播电视台自主研制的悬吊轨道机器人系统的设计理念、组成、功能,设计中遇到的技术问题以及解决 方案。系统经测试、试验、运行满足设计要求,可适用于地方广播电视台需求。
【关键词】 演播室;轨道机器人;悬吊;行车系统;减振系统;控制系统;精确定位;运行平稳
文章编号: 10.3969/j.issn.1674-8239.2018.09.011
Analysis of a Suspension Curve Orbit Robot System
TENG Jian-xin, LIU Qin-shan, QIN Bo-wen
(Guangzhou Broadcasting Network, Guangzhou Guangdong 510066, China)
【Abstract】The design concept, composition, functions, technical problems encountered in the design and solutions of the suspended track robot system independently developed by Guangzhou Broadcasting Network are introduced. The system has been tested, and run to meet the design requirements, and it can be applied to the needs of local radio and TV stations.
【Key Words】studio; orbital robot; suspension; traffic system; vibration absorption system; control system; accurate positioning; smooth operation
1 概述
机器人摄像机能够有效利用演播室空间,增加多维度镜头表现力,满足节目制作多样化的需求,近年来在国内外电视节目制作中得到了大量应用。
演播室轨道机器人的形态主要有两种,吊装轨道机器人和地装轨道机器人。从全景视觉角度和布局而言,吊装轨道机器人的拍摄效果会优于地装轨道机器人,它的拍摄运动范围可沿着设定轨迹运动,在特定时间和空间的双重要求下,拍摄角度更宽阔,从而可以将全景演播室设计的概念融入节目生产。同时,安装于吊装轨道机器人的摄像机拍摄重复性高,且可以精准定位,丰富了节目创作手段。
目前,国内外电视行业应用的主流轨道机器人价格高昂,一般电视台难以承受。通过多次考察和技术论证,广州市广播电视台(以下简称“广州台”)针对400 ㎡高清演播室自主研发了一套悬吊曲线轨道机器人系统,并于2017年成立了轨道机器人研发组,希望通过自身的技术力量以及珠江三角洲地区成熟的产品加工优势,使该系统既可满足拍摄要求,还能降低设备的成本。
2 悬吊曲线轨道机器人系统的功能要求
悬吊曲线轨道机器人系统装设在400 ㎡高清演播室中,设计为吊装轨道机器人,安装在距离地面6.5 m的高度。区别于常见的直线运行轨道,本次设计采用20 m长的曲线轨道,使得摄像机在拍摄过程中可以曲线行进,提供多样的拍摄角度,增加拍摄画面推进的层次感。
电视节目的拍摄对摄像机的平衡与稳定性要求很高,特别是在直播节目中,一旦出现抖动,会对播出效果产生不良影响。轨道机器人在行进过程中,会产生机械振动;摄像机镜头变换时,也会出现摆动。因此,轨道机器人的研发过程中,对于减振的处理至关重要。
为解决这个问题,设计中采用专业三轴稳定云台作为减振云台,配备加速计和陀螺仪。加速计提供实时的重力加速度方向,进而可以计算出设备姿态角度;陀螺仪提供实时旋转角度,通过积分换算成姿态角度。两者采集的数据进行融合,实时计算出设备倾斜角度,然后通过PID算法得出控制量,再传输给电机进行校正。
减振云台的应用能对拍摄过程中的振动及摆动进行实时智能化修正,最终使拍摄效果稳定流畅。
3 曲线轨道设计
广州台400 ㎡高清演播室轨道机器人设计方案,要求轨道机器人运行在长度20 m的曲线轨道上,这种情况较为罕见,设计难度较高。轨道在演播室中的布局见图1。
技术参数如下:轨道距地面高度6.5 m;曲线轨道长度20 m;行走速度0~0.5 m/s;升降速度0~0.09 m/s;伸縮行程2 m;荷载20 kg;摄像机型号为佳能ME200S-SH摄像机,镜头焦段18 mm~80 mm。
4 系统设备组成
悬吊曲线轨道机器人系统由机械运动系统、减振系统及控制系统组成。控制系统发出指令控制机械运动系统的运动方向及运动速率,减振系统对机械运动系统产生的机械振动进行实时消减。
4.1 机械运动系统
机械运动系统包含轨道、轨道基础、行车、驱动。
4.1.1 轨道
考虑到工艺原因,初期雏形采用单轨设计,结构简单,便于轨道曲面成型。但由于行走轮跨度小,导致轨道机器人行走时摄像机有轻微横向摆动(图2)。
后期设计将单轨道系统改为双轨道系统(图3),较好地改善了轨道机器人横向摆动问题。
双轨轨道中心距为560 mm,使用标准规格Φ40 mm×3 mm的无缝钢管设计,轨道弯曲部分使用专业圆管弯曲机械加工而成,由轨道托板支撑,轨道托板通过连接板与桁架相连(图4)。
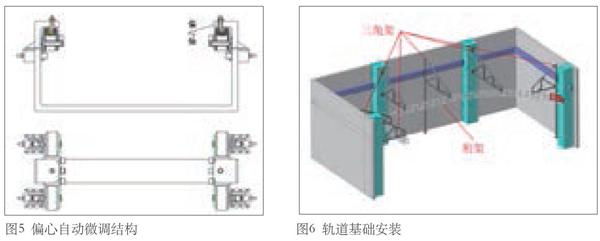
轨道设计采用平行双轨道,要求水平高度一致,轨道表面光滑,加工精度和安装精度极高,参照火车轨道加枕木的安装方式,把轨道平行精度偏差控制在最小范围。但行车对轨道要求绝对平行,为此在一边轮系加了偏心自动微调机构修正偏差(图5)。
4.1.2 轨道基础
机器人在高速移动时会产生很大的动能,要求轨道基础有一定的强度及稳定性。由于灯栅层原设计无法满足承重要求,固定轨道基础成了棘手的问题,必须重新考虑吊装轨道机器人的方式。通过计算,从天花上引下5个吊点,从墙壁上引出6个三角架。桁架固定在三角架底部,每个三角架通过膨胀螺栓固定在墙壁上,桁架固定点均匀分布,三角架用75#角钢,刚性连接(图6)。
桁架采用高强度铝合金管焊接而成,按目前演出市场上常用桁架的规格,中心距400 mm×400 mm设计,以便借用其工装模具,降低成本。
4.1.3 行车
行车由水平行走和升降机构两部分构成。采用伺服电机驱动闭环柔性同步带,牵引行车沿曲线轨道运行,柔性同步带可降低动力传递过程中附带的噪声、振动等缺陷(图7)。
轨道车上安装了8个天然橡胶轮。由于天然橡胶轮既有一定的硬度,又有一定的弹性,还有一定的缓振性,可以吸收掉振动能量的20%~60%,这是其他材料所不能比拟的。天然橡胶轮里面镶嵌动摩擦系数小的精密轴承,最大限度减少能耗损失,最大程度降低机械运行中的噪声及振动。行走机构安装轴采用偏心轴设计,当矢量角发生变化时,产生的作用力反馈到偏心轴上,使行走机构产生一定角度微调,保证行走机构在弯轨处转弯顺畅。
行走安全机构包括一个电子限位和两级机械限位。电子限位采用精密多圈编码器作为传感元件,小车正常运行在电子限位限定的范围内。机械限位设置在轨道两端的固定位置,共两级限位装置,第一级限位为缓冲限位,防止机械在高速运行时因电机直接断电造成机械摆动,第二级限位为绝对保护限位,当机械运行触发第二级限位时,会切断电机电源,停止机械运行,保证运行安全。
升降机构采用三节伸缩,每段长度1 m,管与管之间通过滑块精密配合,既不会因间隙发生摆动,同时又能保证升降顺滑。
提升安全机构包括电子限位和机械限位。电子限位采用精密多圈编码器作为传感元件,升降机构正常运行在电子限位限定的范围内,当触发机械限位时,会切断电机电源,保证运行安全。
4.2 减振系统
减振系统包含斜面减振机构与减振云台。
4.2.1 斜面减振机构
传统平面减振器只对单一轴向减振有效果,对二维空间减振效果差,斜面减振机构吸收了X轴和Y轴两个方向的主要振动能量,综合减振效果明显(图8)。
4.2.2 减振云台
在吊轨机器人之上,采用减振云台,搭配安装摄像机,见图9。在该项目中,选取专业三轴稳定云台作为减振云台,保证绕X轴、Y轴、Z轴旋转,每个轴采用伺服电机,通过加速计及陀螺仪,计算出设备姿态角度及旋转角度,通过PID算法得出控制量,再传输给电机进行校正。在此基础上,减振云台与行车连接处加装专用橡胶减振球,加强减振效果。
根据惯性分析(见图10):
(1)把机械运动加速时间设为0~5 s,这期间速度达到0.5 m/s;
(2)机械匀加运动时:加速度
=0.1 m/s2,
式中v2=0.5 m/s,v1=0,t=5 s;
惯性力
重力
根据力平衡原理,摄像机相对移动距离为 。
式中:H表示伸缩杆最大长度, Q表示负载的重力,m为负载的质量,g为重力加速度,取10 m/s2。
由上面的计算数据可知,摄像机的摆动量和机械运行时的加速时间大小有关。而摄像机云台抗摆动效果有一定的范围,超出云台范围则无法消除摆动。为了减少机械自身的摆动幅度,需要降低加速度,轨道机器人运行采用缓起缓停方式,将启动时间调整到最合适的范围,减少抖动。
4.3 控制系统
控制系统由控制台、驱动部分、检测部分、摄像机云台接口组成。
4.3.1 工作原理
控制系统综合应用单片机技术、网络通信技术、伺服控制技术、编码器等控制技术。
水平运动:控制臺给伺服电机驱动器发送控制命令,伺服电机驱动器对接收到的控制台命令进行解释,控制伺服电机运行,伺服电机运行时驱动减速机运行,同步带随着减速机运动驱动轨道机器人水平运动。伺服电机运行时,通过自身安装的编码器,将位置变化反馈给控制台,控制台通过软件计算当前位置,实现水平方向位置控制。运行过程实时检测是否到限位位置,若到达,及时停止运行。
升降运动:控制台给伺服电机驱动器发送控制命令,伺服电机驱动器对接收到的控制台命令进行解释,控制伺服电机运行,伺服电机运行时通过减速机驱动滚筒转动,缠绕在滚筒上的钢丝绳随着滚筒运动驱动轨道机器人升降运动。伺服电机运行时,通过自身安装的编码器,将位置变化反馈给控制台,控制台通过软件计算当前位置,实现升降方向位置控制。运行过程实时检测是否到限位位置,若到达,及时停止运行。
4.3.2 主要功能
控制系统具备的主要功能有:精确定位,运行平稳;实时升降,平移控制;场景录制;场景重放;与摄像机云台相连,控制摄像机调焦、旋转、俯仰运动等。
5 减噪措施
由于轨道机器人应用于电视节目制作,为保证拍摄效果,噪声的控制极为重要。在此应用场景下,噪声来源通常有两类:机械噪声,即摄像机在轨道行进过程中固定振动产生的噪音;电磁性噪声,由电动机内的电磁振动产生的噪声。
针对机械噪声,采用减振手法,从源头上消除或减弱噪声。在轨道车上面安装橡胶轮,橡胶具有高弹性,拥有更强的阻尼系数,降低噪声效果非常理想。
本项目中驱动电机采用伺服电动机,其运行平稳,噪声小。同时又在电机上增加了隔声吸声措施,最大程度地降低噪声。
6 应用实例
广州台已将该系统应用于高清新闻拍摄,《广视新闻》的拍摄全面应用了该系统(图11)。在节目开始时,轨道机器人沿着轨道缓缓向前推进,摄像机轴心距离地面运动拍摄范围为2.5 m~4.5 m,水平运动速度0~0.5 m/s,升降运动速度0~0.09 m/s,机器人最大俯仰角度不小于±170°,最大水平旋转角度不小于±170°。在拍摄过程中,机器人摄像机会平稳沿曲线轨道移动,并根据节目需求做升降、旋转等动作,为节目的呈现带来全新的形态。
广州台自主研制的悬吊曲线轨道机器人系统,经过一年多的技术验证后,成功应用到实际拍摄中,取得了较好的效果,且该系统的费用只有国外同类产品的四分之一,性价比高, 可作为稳定的解决方案在地市级电视台推广。
