马铃薯播种机分体式滑刀开沟器参数优化与试验
2018-03-09吕金庆衣淑娟陶桂香
吕金庆,衣淑娟,陶桂香,毛 欣
马铃薯播种机分体式滑刀开沟器参数优化与试验
吕金庆1,2,衣淑娟1※,陶桂香1,毛 欣1
(1. 黑龙江八一农垦大学工程学院,大庆 163319; 2. 东北农业大学工程学院,哈尔滨 150030)
针对马铃薯播种机的铧靴式和圆盘式开沟器存在的种薯株距分布不均、播种效果质量差、回土量小等问题,研制出分体式滑刀马铃薯开沟器,并进行关键参数优化,分析开沟和回土过程中土壤颗粒在开沟器上的运动规律,研究种薯落入垄沟后的运动过程,确定影响土壤覆盖种薯效果的因素。采用旋转正交的试验设计方法,以机具前进速度、开沟器侧面夹角、开沟器长度及开沟深度为试验因素,以种薯的横向偏移系数、株距变异系数和回土量为试验指标,分析实施田间试验结果,优化分体式滑刀开沟器的结构参数与最优运动参数:在前进速度为0.95 m/s、开沟器侧面夹角为60°、开沟器长度为500 mm、开沟深度为115 mm时,株距变异系数为10.8%、种薯的横向偏移系数为3.83 mm、回土量为24.1%,满足马铃薯播种作业的要求。该研究结果可为马铃薯开沟播种装置设计与应用提供参考。
农业机械;优化;农作物;开沟器;滑刀;马铃薯;回土量;正交试验
0 引 言
马铃薯是中国第四大主粮作物,在中国种植面积广泛,居世界首位,现已与玉米、大豆、小麦共同被列入四大主食作物[1-2]。马铃薯机械化播种对于产量有着很大的影响,在播种过程中,除排种、投种2个环节外,种子着床工艺的好坏也会影响到播种的精确性,良好的种床环境会提高种子分布的均匀性、播深一致性及出苗率[3-5]。
开沟器作为在播种过程中与垄沟土壤直接接触作业的关键部件,其工作性能的优劣将直接影响着种床好坏和播种质量[6-8]。国外马铃薯开沟器应用较多的为圆盘式开沟器,其开出的V型沟能提高播种精度、不易堵塞、适应性强,但是对土壤扰动量较大,回土覆盖种子的土壤为上部干土、回土量较小,随着播种技术的发展和对种床更高的要求,其作业效果并不能很好满足马铃薯开沟作业要求[9-11]。国内马铃薯开沟器应用铧靴式和滑推式开沟器较多,其通用性好、应用广泛,回土量较大可满足马铃薯的大粒径的覆土要求,但其开出的平沟降低了播种精度[12-13];而滑刀式开沟器可以满足上述开沟器的不足,贾洪雷等[14-16]设计的滑刀式开沟器,开出的V型沟也可保证播种精度,回土后湿土先覆盖种子,可为种子提供质量更好的种床,很好的适用于大豆等小粒径作物的开沟作业,只是其开沟宽度及深度不能满足马铃薯大粒径作物开沟要求。
因此,针对上述问题,本文基于传统的滑刀式开沟器,采用分体式的结构方式,设计了一种分体式滑刀开沟器。本文对其结构参数进行设计,对土壤颗粒在开沟器表面及回土过程的运动学分析,和种薯落入垄沟后的运动学分析,确定了影响土壤覆盖种薯效果的因素,采用旋转正交试验的方法,得出开沟器作业效果最优参数组合,确定所设计的分体式滑刀开沟器的结构参数与运动参数,并验证所设计的开沟器能够满足马铃薯开沟作业要求。
1 整体结构及工作原理
1.1 整体结构
该分体式滑刀开沟器采用了分体式的形式,主要由开沟铲铲片1、开沟铲主体2和开沟器柄3组成,分体式滑刀开沟器结构示意图如图1所示。
1.2 工作原理
开沟器安装在播种机排种器正下方,随着拖拉机的前进方向运动,开沟铲铲片前端的刃口对土壤进行切削破碎,土壤沿着开沟铲铲片的侧面向两边运动,随后沿着开沟铲主体侧壁向后运动,在开沟铲主体侧壁的少量土壤颗粒,在重力和其他土壤颗粒摩擦力的作用下,先落入沟底,为种子的下落提供含水率较高的软种床;其余大量的土壤会沿着开沟铲主体的侧壁向后运动,脱离侧壁后在重力的作用下落入垄沟内,对种薯进行覆盖;位于开沟器上部的开沟器柄可以根据不同的开沟深度要求进行调节。

1.开沟铲片 2.开沟铲主体 3.开沟器柄
1.Blade of ditch shovel 2.Main part of ditch shovel 3.Handle of opener
注:0为开沟器的整体长度,mm;0为开沟器侧面夹角,(°)。
Note:0is length of opener, mm;0is side angle of opener, (°).
图1 分体式滑刀开沟器结构示意图
Fig.1 Schematic diagram of splitter sliding-knife opener
1.3 开沟器的设计
作为与土壤直接作用的部件,开沟器对于种子着床的好坏及种子覆盖有很大的影响。因此,其结构的设计尤为重要。
传统的滑刀式开沟器,为厚度在3~8 mm的滑刀刀片,根据作业条件不同,入土角一般选在20°~60°间,其入土切土能力好,所开出的垄沟成V型沟,可提高种子在垄沟的播种质量,且对土壤扰动小,下层土壤可先回流,为播种提供良好的种床,但是其开沟宽度小、深度低,不能满足马铃薯大粒径作物的播种要求[15,17]。因此,本设计基于上述传统开沟器,创新设计了由开沟器主体和铲片组成的分体式滑刀开沟器,根据马铃薯的播种农艺要求,在播种时最大耕深可达到150 mm[5],采用开沟器主体与开沟器铲片组合的形式,可调节铲片的高度,以此增加开沟作业的深度,设计开沟器铲片高度为160 mm,略大于开沟深度,铲片采用铸钢材料,耐磨性较好,为使马铃薯顺利落入垄沟,马铃薯需要播种时种沟宽度较大,一般不小于150 mm[18-19],使开沟时土壤颗粒向两侧运动,设计铲片包括左、右两部分,采用折弯的方式,将两部分前端进行焊接,保证前端铲片能顺利入土,作业时土壤可沿后部折弯部分表面向两侧运动。舀勺式马铃薯排种器下部的整体宽度为240 mm,考虑到开沟器宽度需略大于排种器宽度,为配合马铃薯播种机作业时开沟器侧壁不磕碰种薯、使其顺利落入垄沟内,参照铧靴式马铃薯开沟器尺寸,并综合考虑开沟器安装位置和垄台宽度,设计开沟器的宽度为280 mm[20]。
土壤摩擦角一般在15°~38°之间,为使铲片对土壤有滑切作用,倾角应大于90°+,所以设计的铲片倾角为135°[21]。根据预试验,铲片厚度过小,装置强度低;铲片厚度过大,也会增加作业时的工作阻力,会使入土性能和土壤的滑切作用下降,土壤破碎效果差,不能达到开沟所需的土壤颗粒破碎要求,参照传统马铃薯开沟器并综合考虑开沟器的整体宽度,设计的铲片厚度为8 mm[18,21]。为了减少土壤颗粒之间在开沟器表面运动的相互影响,使下方湿土先回流,提高良好的种床条件,刃口曲线设计成直线[14]。
开沟器铲片其上沿与开沟器主体侧板下沿平行,土壤颗粒沿着铲片侧板运动继而沿开沟器侧表面运动,在开沟器主体侧板运动时,部分颗粒在重力作用下回落入垄沟,且下层土壤颗粒先落到沟中,利于马铃薯发芽[22],因此,侧板的底部倾角大于土壤颗粒的摩擦角,使土壤颗粒顺利滑落至沟底,设计向内倾斜45°的折弯形式,土壤颗粒可沿着表面下落。根据文献[7]与预试验,开沟器的整体长度0与开沟器侧面夹角0,即2个铲片折弯后的夹角,直接影响着开沟作业土壤覆盖种薯状态,在对开沟器设计时,需要对其参数进行分析,通过后续理论与田间试验进行对比开沟后的效果确定优化参数。开沟器柄侧面有8个异型孔,根据不同的作业条件进行开沟器整体高度调节。
2 开沟器作业过程运动学分析
开沟器开沟后,土壤覆盖种子的情况,直接影响种子的生长,需要对土壤颗粒在开沟器上的运动及种子在开沟后垄沟的状态进行分析,得出开沟器最优的结构参数[23]。
2.1 土壤颗粒的运动学分析
2.1.1 土壤颗粒在开沟器侧面的运动学分析
将土壤颗粒视为散粒体,对其进行分析。认为在开沟过程中开沟器运动速度为匀速运动,耕深保持稳定[17,24]。如图2所示,开沟器对土壤作用,分析接触面上一点,包括土壤颗粒受到的铲片支持力及土壤颗粒受到铲片的摩擦力0。将压力分解为与速度方向相同和沿接触面方向,前进速度方向与法线夹角为,土粒在接触面上进行滑动,因切向应力大于摩擦阻力,开沟器接触面对土壤有滑切作用。
土壤颗粒受到的合力为,方向与土粒的绝对运动相同,土壤颗粒的运动微分方程


式中表示土壤的自然休止角,(°);为土壤颗粒受到的重力,N;为土壤摩擦角,(°)。

注:N为土壤颗粒受到铲片的支持力,N;β为前进速度方向与法线夹角,(°);F0为土壤颗粒受到铲片的摩擦力,N;R为土壤颗粒受到的合力,N;N1为压力沿着接触面方向的分力,N;N2为压力在速度方向的分力,N;N0为土壤颗粒受到的压力,N;F1为侧板对颗粒的摩擦力,N;F2为边缘土层对于接触面颗粒的作用力,N。
土壤颗粒在接触面上的速度v与位移


当颗粒运动到边缘后,会沿着开沟器侧板进行运动,受到侧板对颗粒的摩擦力1,还有边缘土层对接触面颗粒的作用力2。如图2所示。
土壤颗粒的运动微分方程为

式中1表示土壤颗粒之间的摩擦角。
将上一过程的最终状态作为此过程的初始状态,求得土壤脱离开沟器侧板的瞬间具有的速度

其中,开沟器侧面夹角0与大小相等,影响土壤颗粒速度的因素包括:开沟器侧面夹角0和开沟器长度0。
2.1.2 土壤颗粒回土过程运动学分析
土粒回落到沟内,主要包括土层边缘的土粒下落,和自然休止角范围内所有土壤颗粒下落。2种土壤颗粒落入垄沟时间对种子覆盖有很大影响[24-25],据参考文献[24],边缘土壤颗粒接触沟底的时间要小于休止角范围内的土壤颗粒落入沟底的时间。在播种作业过程中,使边缘土壤颗粒落入垄沟时,种薯先与沟底接触,以提高播种效果。
如图3所示,自然休止角范围内的所有土壤颗粒下落,沿着土壤自然休止角的斜面运动。

注:FN为土壤颗粒受到垄沟侧壁的支持力,N;Ff为土壤颗粒受到垄沟侧壁的摩擦力,N;mg为土壤颗粒受到的重力,N;α表示土壤的自然休止角,(°)。
土壤颗粒离开开沟器侧板时,具有水平的初速度v0,自然休止角范围内土壤颗粒下落的位移方程

由式(8)可知,边缘土壤颗粒落入垄沟,需种薯先与沟底接触,颗粒落入沟底时间与初速度v0有关,由式(7)结论可知,影响初速度v0的因素为开沟器的侧面夹角0,开沟器长度0,即上述两个因素影响颗粒落入沟底的时间。
2.2 马铃薯落入垄沟的运动学分析
覆盖种薯的效果,除与开沟器作用有关,也与马铃薯在开沟后沟内的运动有关。如土壤颗粒落入垄沟时间内,种薯并未落入沟底,会直接影响播种效果,因此,需对种薯落入垄沟的运动情况进行分析[20,24,26]。
2.2.1 种薯的滚落条件
理想的投种情况为马铃薯种薯落入到V型沟的底部,种薯间的横向偏移系数小,播种质量高[20]。马铃薯薯块落入垄沟的侧壁,对土壤有压实作用,种薯会随着一起下陷,存在由于土壤含水率过大,坚实度较小,马铃薯薯块部分压入土壤中而静止。对落在沟侧壁上马铃薯薯块进行分析,如图4所示。
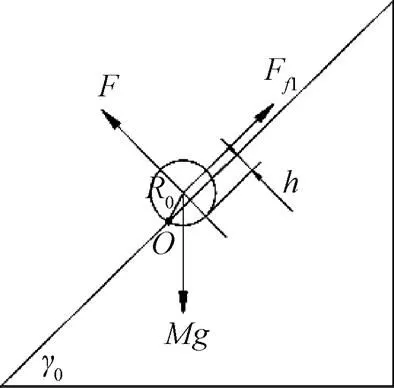
注:O为种薯与土壤接触点;γ0为沟面的倾斜角度,(°);R0为种薯半径,mm;Ff1为种薯所受的摩擦力,N;F为种薯受到的支持力,N;Mg为种薯受到的重力,N;h为种薯压入土壤的位移,mm。
分析马铃薯薯块的临界状态,对接触点点分析

式中表示种薯受到的支持力,N;取常规种薯的半径为24.38 mm[20],=9.8 m/s2。根据快速载荷的加载的土壤压实理论公式。

式中表示土壤所承受的压力;是关于土壤形状的参数,一般取1.01;表示土壤的下陷量;是常数,由经验公式得出一般选取2~3[24]。
计算得马铃薯陷入土壤的位移为8 mm,对应土壤的坚实度为63 kPa[27]。因此,当土壤坚实度大于63 kPa时,马铃薯会沿着斜面滚下,对于开沟器所适用的东北地区,其所对应的土壤含水率不超过22%。
2.2.2 种薯在沟内的下落过程
种薯落入沟内的时间,与下落过程的运动状态有关,根据参考文献[20],选取种薯落入沟内的最小时间,即仅弹跳一次后落入沟内,分析种薯落入沟底所需时间[20,24]。垄沟内种薯运动过程如图5所示。

注:v1为种薯的入射速度,m·s-1;v2为种薯的反弹速度,m·s-1;γ为沟面与法线夹角,(°);v3为滑动初速度,m·s-1。
种薯弹跳后落入沟底,轨迹方程为
当种子与土壤再次接触时,其运动的时间1
弹跳后种子会沿着沟壁滑入沟底,运动方程为

种子从接触土壤到落入沟底所经历的时间
通过式(13)和(14)可知,影响种薯落入沟底运动时间因素,与种薯反弹速度2、沟面和法线夹角有关,开沟器直接作用土壤,由开沟器的侧面夹角0所决定,运动时间也与在2方向即斜面上运动距离有关,且与距离成正比,即与开沟深度成正比[28-30]。
如图6所示,覆盖种薯效果,要比较种子从点落到沟底与开沟器上土粒从开始运动到落回沟底时间。在点的边缘土壤颗粒运动到沟底时间内,种子需先接触沟底,在土壤颗粒回流之前的时间内,沟底敞开部分的长度可供种子落入。根据参考文献[29],沟底敞开长度受机具前进速度的影响,并与其成正比。土壤颗粒前进的距离1与2之和等于种子的前进距离与开沟器长度0之和,如果土壤颗粒先与种薯回流,便不能完全覆盖种薯,从而影响种薯在垄沟的位置,降低种薯间株距一致性[24,29]。

注:H为投种高度,mm;h1为开沟深度,mm;S1为土粒从开沟器尾部到沟底运动的距离,mm;S种子落入沟底所前进距离,mm;x0为开沟器的整体长度,mm;S2为土粒在开沟器上运动的距离,mm;vc为播种机前进速度,m·s-1。
通过上述分析,能够确定,影响土壤颗粒与种薯运动至沟底时间的因素为:机具的前进速度、开沟器长度、开沟器的侧面夹角及开沟深度。进而影响了土壤覆盖种薯效果,而土壤与种薯间相互作用的不确定性[24,29],导致了其具体表现形式包括株距变异系数、种子横向偏移系数和回土量不同,后续通过田间试验,对比不同参数开沟器的效果,优化结构和运动参数。
选取播种机正常作业条件下的极限前进速度1.5 m/s,留有较长的敞开长度,在这个时间内,种薯需要落入垄沟沟底,计算可得开沟器长度理论上不超过600 mm[29]。当播种机的结构固定后,根据舀勺式马铃薯播种机的工作条件及文献[20],投种高度固定为640 mm,选取理论的株距为230 mm。式(14)知,排种带速度直接影响种薯的投种速度,由于投种速度不一致,会导致种薯落入沟底前初始状态不同,影响开沟覆土的效果,因此需要固定排种带的转速,舀勺式马铃薯播种机传动比为10:13[20],当前进速度为1 m/s时,排种带转速为42 r/min,随着前进速度的增加,排种带速度也随之增大,试验中要保证投种速度一致,改变机具前进速度时调节中间传动装置,以使排种带速度固定在42 r/min,防止种薯落入垄沟后弹跳较远,影响播种质量,来探究开沟器结构参数对试验的影响。
3 田间试验
3.1 试验条件
2015年5月在黑龙江省农业科学院试验基地,进行分体式滑刀开沟器的播种性能试验。试验土地平整,土壤坚实度为61.9 kPa,土壤含水率为18.7%,配套动力选择59.6 kW的拖拉机;试验整薯选用东农311品种,三轴尺寸为46.3 mm×34.8 mm×24.6 mm,形状指数为203.7,平均质量为23.56 g,平均含水率为75.4%,净度>99%,田间试验如图7所示。

图7 田间试验
3.2 评价指标
参照《GB/T 6242-2006 种植机械马铃薯种植机试验方法》和《NY/T740-2003 田间开沟机械作业质量》规定的试验方法,考察安装分体式滑刀开沟器的马铃薯播种机的播种性能。排种质量的具体表现形式为株距变异系数、种子横向偏移程度和回土量大小。
选取每次播种过程中,一行的5个测量段进行数据采集,每段测量20个种薯的间距,共选取100个种薯进行株距测量,测量3次,计算出株距变异系数[31]。
机具作业100 m测量一组数据,以种沟中线为基准,测量种子偏移量,每行连续测量100粒种薯,进行3次重复试验,计算每一次测量中100组数据的标准差即为种子横向偏移系数[16]。可由式(16)得出。

式中为种子横向偏移系数,mm;x为每次测量的偏移量,mm;为偏移量的算术平均值,mm;表示试验数据测量的数量。
使用回土体积与理论沟形体积比作为回土量的计算方法,参照文献[16]采用端面法进行回土量的计算,截取种沟的三角形截面,在开沟较平稳的种沟中段取15 m的范围,随机取5个横断面,测量开沟的实际深度及去除回土后的理论开沟深度,如图8表示。可由式(17)计算得出回土量。

式中为回土量,%;为回土体积,mm3;为理论开沟体积,mm3。
注:′为实际种沟深度,mm;为测量实际开沟深度,mm;为实际开沟宽度,mm。
Note:′is actual seed furrow depth, mm;is the mearsuring furrow depth, mm;is actual seed furrow width, mm.
图8 实际种沟截面示意图
Fig.8 Schematic diagram of actual seed furrow section
3.3 试验方案与结果分析
3.3.1 二次旋转正交组合试验设计
进行(四因素)二次旋转正交组合试验,选取马铃薯播种机正常作业速度范围0.5~1.5 m/s;根据预试验,开沟器侧面夹角过大,其工作阻力增加,取值一般不超过90°,综合考虑开沟器整体宽度及预试验效果,开沟侧面夹角的范围为40~80°,参照传统马铃薯开沟器的整体长度,考虑到开沟器的长度及在播种机的安装位置,避免播种过程中碰撞种薯,开沟器长度选取为400~600 mm,根据马铃薯开沟的农艺要求,马铃薯开沟深度最大不超过150 mm,一般在100 mm左右,选取开沟深度70~150 mm。进行田间试验时,可根据不同实际情况对排种器进行调节。通过试验,对指标的因素进行显著性的分析,根据实际需要对各参数组合进行优化[29],试验因素水平编码表如表1所示。
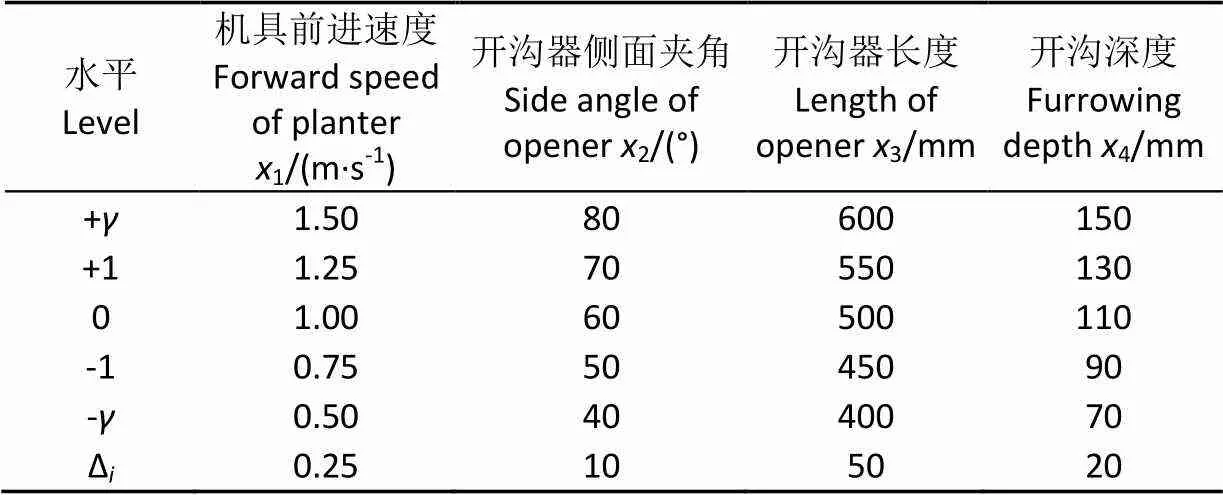
表1 试验因素水平编码表
注:选取中心点的试验次数为12次。
Note: Number of tests for the center point is 12 times.
3.3.2 试验结果分析与回归模型建立
试验方案及试验结果如表2所示。利用Design Expert 8.0.6软件对试验结果进行二次回归分析,并进行多元回归拟合,得到株距变异系数1、种子横向偏移系数2和回土量33个试验指标的回归方程,并检验其显著性。
1)株距变异系数1的显著性分析
通过对数据的分析,株距变异系数1方差表如表3所示。由表3可知,试验模型显著(<0.01),主因素中开沟深度对于指标影响最为显著,交互项中开沟器侧边夹角和开沟深度的交互作用24对指标影响最大。各因素对株距变异系数的影响主次顺序为4>1>3>2,将不显著因素并入残差项后再次进行方差分析,结果如表3所示,得到各个因素与指标间回归方程如式(18)所示。

表2 试验方案及试验结果

表3 株距变异系数的方差分析
注:“/”下数字为剔除不显著因素后株距变异系数方差分析结果。
Note: Numbers under “/” are variance analysis results for coefficient of variation of row spacing after rejected no significant factors.
式中1为机具前进速度,m/s;2为开沟器侧面夹角,(°);3为开沟器长度,mm;4为开沟深度,mm。
对上述回归方程进行失拟性检验,证明试验指标与因素间具有显著的二次关系(>0.1)。
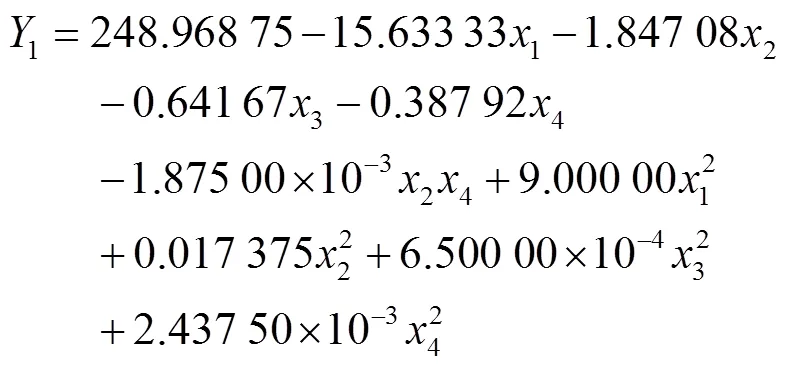
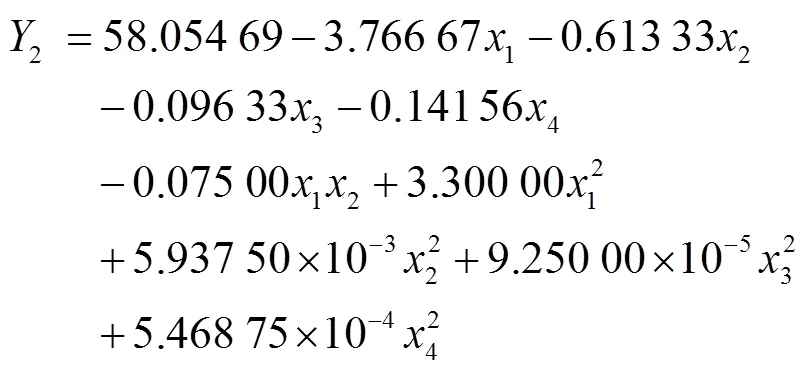
2)种子横向偏移系数2的显著性分析
种子横向变异系数2方差表如表4所示。试验模型显著(<0.01),主因素中开沟深度对于指标影响最为显著,交互项中前进速度和开沟器侧边夹角的交互作用12对指标影响最大。各因素对种子横向变异系数的影响主次顺序为4>1>2>3,将不显著因素并入残差项后再次进行方差分析,结果如表4所示,得到各个因素与指标间回归方程如式(19)所示。
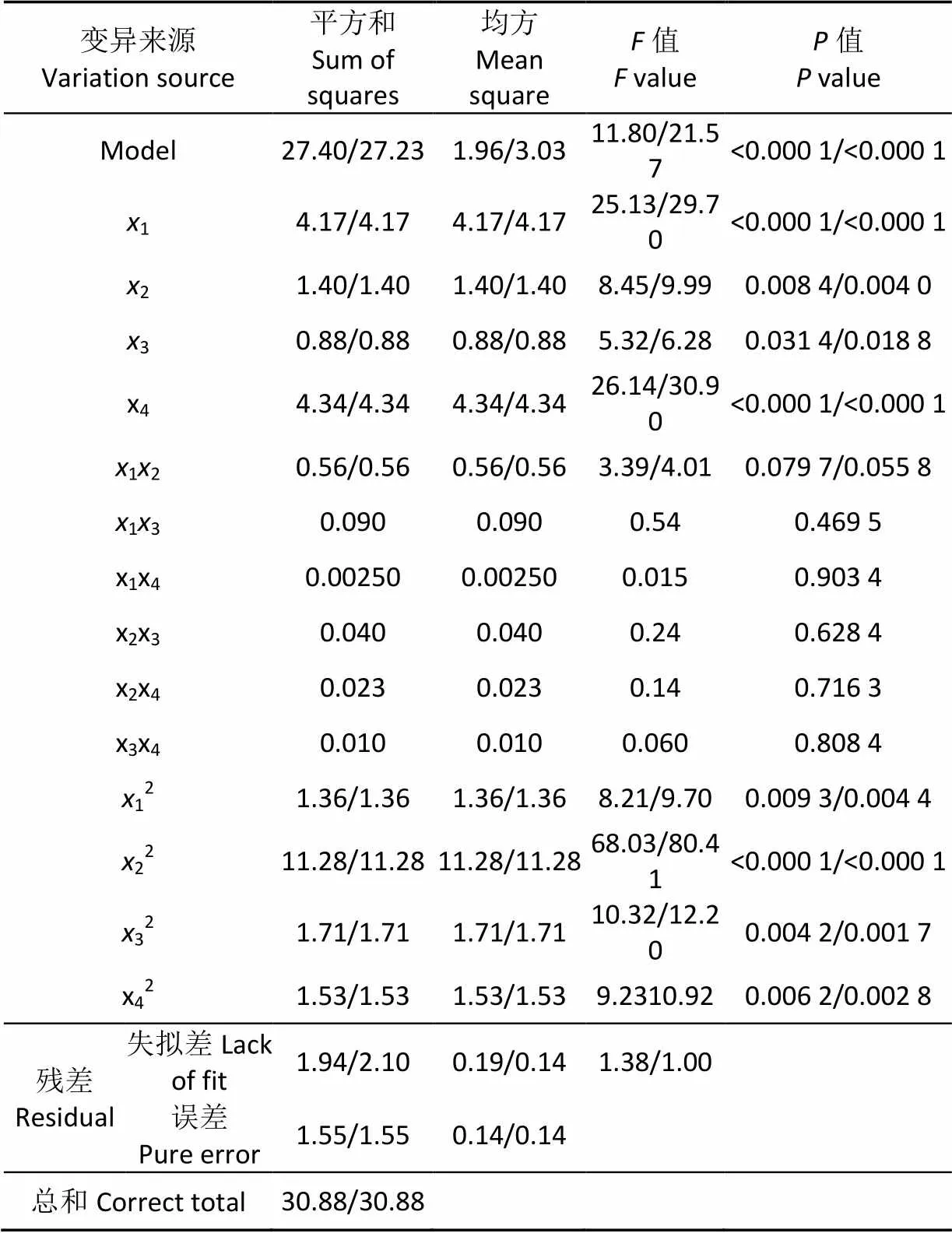
表4 种子横向偏移系数的方差分析
对上述回归方程进行失拟性检验,证明试验指标与因素间具有显著的二次关系(>0.1)。
3)回土量3的显著性分析
种子横向变异系数3方差表如表5所示。试验模型显著(<0.01),主因素中开沟深度对于指标影响最为显著,交互项中前进速度和开沟器长度的交互作用12对指标影响最大。各因素对回土量的影响主次顺序为4>1>3>2,将不显著因素并入残差项后再次进行方差分析,结果如表5所示,得到各个因素与指标间回归方程如式(20)所示。

对上述回归方程进行失拟性检验,证明试验指标与因素间具有显著的二次关系(>0.1)。

表5 回土量的方差分析
3.3.3 响应曲面分析
通过Design-Expert 8.0.6 软件对数据的处理,得出因素间的显著和较显著交互作用对3个试验指标影响的响应曲面,如图9所示。
对于株距变异系数,当前进速度为1.0 m/s、开沟器长度为500 mm时,开沟器侧面夹角与开沟深度交互作用影响如图9a所示,当开沟器侧面夹角固定,株距变异系数随着开沟深度增加先减小后增加,开沟深度最优范围为90~122 mm;当开沟深度固定,株距变异系数随着开沟器侧面夹角增加先减小后增加,开沟器侧面夹角最优范围为52°~67°。
对于种子横向变异系数,当开沟器长度为500 mm、开沟深度为110 mm时,前进速度与开沟器侧面夹角的交互作用影响如图9b所示,当开沟器侧面夹角固定,种子横向变异系数与前进速度呈负相关,前进速度最优范围为0.85~1.25 m/s;当前进速度固定,种子横向变异系数与随着开沟器侧面夹角先减小后增加,开沟器侧面夹角最优范围为50°~63°。
对于回土量,当开沟器侧面夹角为60°、开沟深度为110 mm时,前进速度与开沟器长度交互作用影响如图9c所示,当前进速度固定,回土量随着开沟器长度的增加先增加后减小,开沟器长度最优范围为460~525 mm;当开沟器长度固定,回土量与前进速度呈负相关,前进速度最优范围为0.75~1.05 m/s。当前进速度为1.0 m/s、开沟器侧面夹角为60°时,开沟器长度与开沟深度交互作用影响如图9d所示,开沟器长度固定,回土量与开沟深度呈正相关,开沟深度最优范围为106~130 mm;当开沟深度固定,回土量随着开沟器长度先增加后减小,其最优的范围为475~525 mm。
为获得开沟器作业的最佳运动参数与结构参数,利用Design Expert 8.0.6软件中的优化模块对上述3个回归模型进行约束目标优化求解,根据实际作业及相关理论选择优化约束条件。目标及约束函数。

对目标函数进行优化求解,得到结果为:当机具前进速度为0.95 m/s,开沟器侧面夹角为60°、开沟器长度为500 mm,开沟深度为115 mm时,株距变异系数为10.3%,种子横向偏移系数3.62 mm,回土量为23.6%[32]。
3.4 验证试验
3.4.1 试验条件
2015年6月在黑龙江省农业科学院试验基地进行验证试验,选取优化后开沟器的长度为500 mm,侧面夹角60°,机具前进速度为0.95 m/s和开沟深度为115 mm,对开沟器柄重新开孔,使其开沟深度可调节到115 mm。土地平整,含水率为18.2%。以文献中的试验方法进行试验,试验重复3次取均值,试验方法与前述试验相同[30-31]。
3.4.2 试验结果分析
将装有分体式滑刀开沟器的播种机与文献[33]中规定的指标值对比,以及与安装有传统铧靴式开沟器播种机播种效果进行性能对比,结果如表6所示[33-34]。
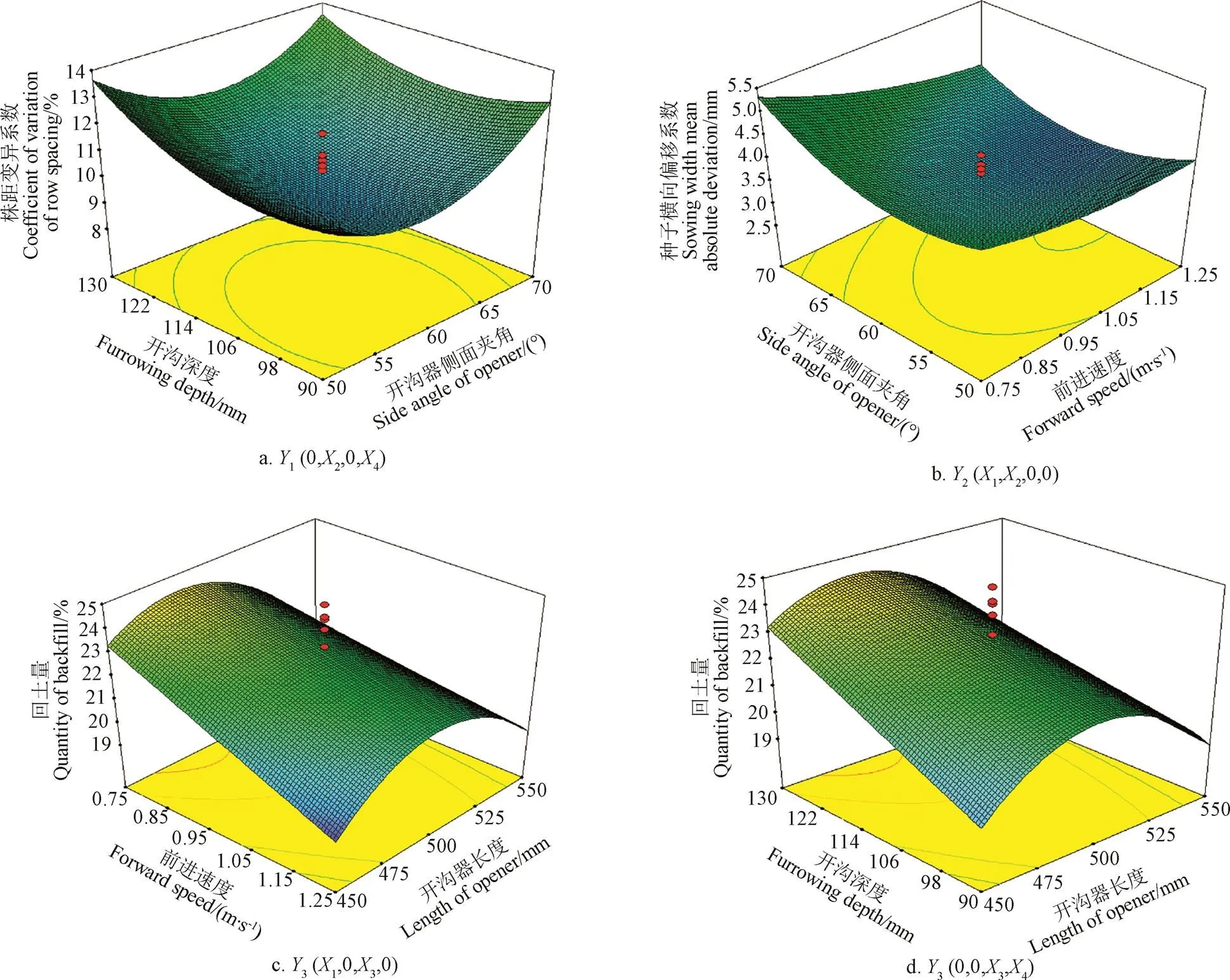
图9 分体式滑刀开沟器作业指标的双因素响应曲面

表6 2种开沟器作业性能及相关标准
试验结果得出装有分体式滑刀开沟器播种机实际的株距变异系数为10.8%,种子的横向偏移系数为3.83 mm,回土量为24.1%,均能达到相应的国家标准,均优于传统的铧靴式开沟器,且提升效果显著(<0.01)。从对比试验中可以看出分体式滑刀开沟器开出的V形沟比铧靴式开沟器开出的平沟效果好,是由于V型沟能减少种薯落入沟底后的运动和横向位移,使种薯在垄沟内横向位置方向更接近于垄沟中心,提高种薯株距一致性,并且分体式滑刀开沟器长度为500 mm与开沟器侧面夹角60°的组合,可为种薯落入垄沟留有足够的时间,回土量较大,充分覆盖种薯。
4 结 论
本文设计了一种分体式滑刀开沟器,可以增加耕深、方便调节,对其结构而参数进行了确定,并对土壤在开沟器上的运动过程、土壤回落过程及种薯落入垄沟的运动过程进行理论分析,得出土影响土壤颗粒与种薯运动至沟底时间,进而影响了覆土后马铃薯种薯沟内的效果的开沟器结构因素和运动参数因素为机具前进速度、开沟器的侧面夹角、开沟器长度和开沟深度。
对安装有分体式滑刀开沟器的播种机进行了二次正交旋转组合田间试验,建立了各个因素与指标间的回归模型,得出开沟器最优结构参数。通过对比试验验证了分体式滑刀开沟器工作后的播种效果。当前进速度为0.95 m/s,开沟器侧面夹角为60°、开沟器长度为500 mm,开沟深度为115 mm时,株距变异系数为10.8%,种子的横向偏移系数为3.83%,回土量为24.1%,结果均比传统的铧靴式马铃薯开沟器作业后播种效果好,满足马铃薯播种的作业要求。
[1] 柳俊. 我国马铃薯产业技术研究现状及展望[J]. 中国农业科技导报,2011,13(5):13-18.
Liu Jun. Research status and prospects of potato industry in China[J]. Journal of Agricultural Science and Technology, 2011, 13(5): 13-18. (in Chinese with English abstract)
[2] 杨帅,闵凡祥,高云飞,等. 新世纪中国马铃薯产业发展现状及存在问题[J]. 中国马铃薯,2014,28(5):311-316.
Yang Shuai, Min Fanxiang, Gao Yunfei, et al. Status quo and challenges of China potato industry of the 21st century[J]. Chinese Potato Journal, 2014, 28(5): 311-316. (in Chinese with English abstract)
[3] 李伟红. 2CM-2型马铃薯播种机的结构与性能研究[J].农业科技与装备,2012(5):16-19. Li Weihong. Research on the structure and performance of 2CM-2 potato planter[J]. Agricultural Science & Technology and Equipment, 2012(5): 16-19. (in Chinese with English abstract)
[4] 苏升元,高焕文,张晋国. 免耕播种开沟器工作性能的测试与分析[J]. 中国农业大学学报,1999,4(4):28-30.
Su Shengyuan, Gao Huanwen, Zhang Jinguo. Measurment and analysis on working performance of tine furrow openers on no-Tillage soil[J]. Journal of China Agricultural University, 1999, 4(4): 28-30. (in Chinese with English abstract)
[5] 杜宏伟,尚书旗,杨然兵,等. 我国马铃薯机械化播种排种技术研究与分析[J]. 农机化研究,2011,33(2):214-217.
Du Hongwei, Shang Shuqi, Yang Ranbing, et al. Research and analysis on mechanized potato seed sowing techniques[J]. Journal of Agricultural Mechanization Research, 2011,33(2): 214-217. (in Chinese with English abstract)
[6] 苟文,马荣朝,杨文钰,等. 小麦免耕播种机开沟器的设计[J].农业工程学报,2012,28(增刊1):21-25. Gou Wen, Ma Rongchao, Yang Wenyu, et al. Design of opener on no-till wheat seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.1): 21-25.(in Chinese with English abstract)
[7] Collins B A, Fowler D B. Effect of soil characteristics, seeding depth, operating speed and opener design on draft force during seeding[J]. Soil and Tillage Research, 1996, 39(3/4): 199-211.
[8] 荣长发,马成林,张守勤. 疙瘩开沟器减粘降阻机理及试验研究[J]. 农业工程学报,1998,14(4):124-128.
Rong Changfa, Ma Chenglin, Zhang Shouqin. Mechanism on viscosity reducing and drag reduction of knot furrow opener[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1998, 14(4): 124-128. (in Chinese with English abstract)
[9] Singh K P, Agrawal K N, Jat D, et al. Design, development and evaluation of furrow opener for differential depth fertilizer application[J]. Indian Journal of Agricultural Sciences, 2016, 86(2): 250-255.
[10] Ozmerzi A, Karayel D, Topakci M. Effect of sowing depth on precision seeder uniformity[J]. Biosystems Engineering, 2002, 82(2): 227-230.
[11] Singh S, Tripathi A, Singh A K. Effect of furrow opener design, furrow depth, operating speed on soil characteristics, draft and germination of sugarcane[J]. Sugar Technology, 2017, 19(5): 476-484.
[12] 吕金庆,韩休海,杨金砖,等. 2CMF-2型马铃薯施肥种植机[J]. 农机化研究,2009,31(6):103-105. Lü Jinqing, Han Xiuhai, Yang Jinzhuan, et al. 2CMF-2-type potato plant fertilizing machine[J]. Journal of Agricultural Mechanization Research, 2009, 31(6): 103-105. (in Chinese with English abstract)
[13] 刘全威,吴建民,王蒂,等. 马铃薯播种机的研究现状及进展[J]. 农机化研究,2013,35(6):238-241.
Liu Quanwei, Wu Jianmin, Wang Di, et al. Current Status and Progess of the Potato Seeder[J]. Journal of Agricultural Mechanization Research, 2013, 35(6): 238-241. (in Chinese with English abstract)
[14] 贾洪雷,郑嘉鑫,袁洪方,等. 大豆播种机双V型筑沟器
设计与试验[J]. 吉林大学学报:工学版,2017,47(1):323-331. Jia Honglei, Zheng Jiaxin, Yuan Hongfang, et al. Design and experiment of a double-V-shaped furrow opener of soybean seeder[J]. Journal of Jilin University: Engineering and Technology Edition, 2017, 47(1): 323-331. (in Chinese with English abstract)
[15] 顾耀权,贾洪雷,郭慧,等. 滑刀式开沟器设计与试验[J].农业机械学报,2013,44(2):38-42.
Gu Yaoquan, Jia Honglei, Guo Hui, et al. Design and experiment of sliding knife furrow openner[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(2): 38-42. (in Chinese with English abstract)
[16] 贾洪雷,郑嘉鑫,袁洪方,等. 仿形滑刀式开沟器设计与试验[J]. 农业工程学报,2017,33(4):16-24. Jia Honglei, Zheng Jiaxin, Yuan Hongfang, et al. Design and experiment of profiling sliding-knife opener[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(4): 16-24. (in Chinese with English abstract)
[17] 中国农业机械化科学研究院. 农业机械设计手册(上册)[M]. 北京:机械工业出版社,1988.
[18] Singh R D. Comparative study between semi-automatic potato () planter and conventional method[J]. India Journal of Agricultural Sciences, 2007, 77(12): 824-827.
[19] Buitenwerf H, Hoogmoed W B, Lerink P, et al. Assessment of the behaviour of potatoes in a cup-belt planter[J]. Biosystems Engineering, 2006, 95(1): 35-41.
[20] 吕金庆,王英博,李紫辉,等.加装导流板的舀勺式马铃薯播种机排种器性能分析与试验[J]. 农业工程学报,2017,33(9):19-28.
Lü Jinqing, Wang Yingbo, Li Zihui, et al. Performance analysis and experiment of cup-belt type patato seed-metering device with flow deflector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(9): 19-28. (in Chinese with English abstract)
[21] Tessier S, Saxton K E, Papendick R I, et al. Zero tillage furrow opener effects on seed environment and wheat emergence[J]. Soil and Tillage Research,1991,21(34): 347-360.
[22] 孙伟,王关平,吴建民. 勺链式马铃薯排种器漏播检测与补种系统的设计与试验[J]. 农业工程学报,2016,32(11):8-15.
Sun Wei, Wang Guanping, Wu Jianmin. Design and experiment on loss sowing testing and compensation system of spoon-chain potato metering device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(11): 8-15. (in Chinese with English abstract)
[23] Zhang X C, Li H W, Du R C, et al. Effects of key design parameters of tine furrow opener on soil seedbed properties[J]. International Journal of Agricultural and Biological Engineering, 2016, 9(3): 67-80.
[24] 张波屏. 播种机械设计原理[M]. 北京:机械工业出版社,1982:389-403.
[25] 赵淑红,刘宏俊,张先民,等.滑推式开沟器设计与作业性能优化试验[J]. 农业工程学报,2016,32(19):26-34.
Zhao Shuhong, Liu Hongjun, Zhang Xianmin, et al. Design and optimization experiment of working performance of sliding push opener[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 26-34. (in Chinese with English abstract)
[26] 袁锐. 精密播种机开沟器对种子触土后位移的控制及部件的研究[D]. 长春:吉林大学,2006.
Yuan Rui. Research of its Displacement after Seeds Touching Soil Controlled by the Furrow Opener of Precision Planter and its Parts[D]. Changchun: Jilin University, 2006. (in Chinese with English abstract)
[27] 姚贤良. 土壤物理学[M]. 北京:农业出版社,1986:202-208.
[28] 王庆杰,姚宗路,高焕文,等. 楔刀型免耕开沟器设计与试验[J]. 机械工程学报,2008,44(9):177-182. Wang Qingjie, Yao Zonglu, Gao Huanwen, et al. Design and experiment on a wedge shaped no-tillage opener[J]. Chinese Journal of Mechanical Engineering, 2008, 44(9): 177-182.(in Chinese with English abstract)
[29] 任文涛,刘涌.精量播种机开沟器长度设计方法的研究[J]. 沈阳农业大学学报,2003,36(6):448-451.
Ren Wentao, Liu Yong. Design of the length of furrow opener of sowing machine[J]. Journal of Shenyang Agricultural University, 2003, 36(6): 448-451. (in Chinese with English abstract)
[30] Boydas M G, Uygan, F. Influence of seed physical properties and speed on the external mechanical damage index and in-row spacing uniformity in an automatic potato planter[J]. Tarim Bilimleri Dergisi-Journal of Agricultural Sciences, 2012, 18(2): 126-136.
[31] 中国国家标准化管理委员会. 马铃薯种植机械:GB/T 6242-2006[S]. 北京:中国标准出版社,2007.
[32] 葛宜元. 试验设计方法与Design-Expert软件应用[M]. 哈尔滨:哈尔滨工业大学出版社,2014:155-164.
[33] 中华人民共和国农业部. 马铃薯种植机质量评价技术规范:NY/T 1415-2007[S]. 北京:中国标准出版社,2011.
[34] 中华人民共和国农业部. 田间开沟机械作业质量评价技术规范:NY/T740-2003[S]. 北京:中国标准出版社,2011.
Parameter optimization and experiment of splitter sliding-knife opener for potato planter
Lü Jinqing1,2, Yi Shujuan1※, Tao Guixiang1, Mao Xin1
(1.,,163319,; 2.,,150030,)
The seed potato distribution is not uniform, and the seeding quality and quality of back fill is poor when potato seed casting into the furrow by using the ditching shoe and disc opener. In this study, the splitter sliding-knife potato opener was designed and optimized. It had a good embedded performance. The opener was towed by a tractor when the potato planter was operation. The installation site was under the seed-metering device and the longitudinal direction of opener can be adjusted to requirements. A V-shape furrow was got after the working process of opener. The soil particles were cutting and crashed by the edge of the shovel at the front side of the opener, and moved along the side surface of opener. Some of soil particles were fall into the furrow firstly to create a soft furrow thus providing a better furrow situation for potato to grow. In this paper, we also obtained the main factors that influenced soil covering for seed potato, by analysis of the soil particles in the process of motion on the side of the opener and the process of soil fall into furrow, and also kinematics analysis the seed potato falls into the furrow. The time at which the soil particles contact the bottom of the furrow was less than the time at which the soil particles fall into the furrow at the range of the resting angle. The planting effects were not only influenced by the parameters of opener, but also had a connection with the position of potato casted into furrow. The ideal seeding condition is that the potato fall into the bottom of the V-shape furrow, the lateral deviation coefficient of the seed potato is well, and the sowing quality is higher. To get good effects of planting, the time of potato fall into furrow should be less than that of soil particles fall back into furrow. The factors influencing the effect of the potato seed in the ditch were obtained through theoretical analysis after the movement parameters of planter were collected, and they were forward speed, depth of furrow, the length of opener and side angle of opener when initial conditions of the seeding were determined. A rotating orthogonal field experiment was designed. With forward speed, side angle of opener, length of opener and depth of furrow were taken as the experiment factors, coefficient of variation of row spacing, sowing width mean absolute deviation and quality of back fill as the test indices. The test was implemented in Heilongjiang Academy of Agricultural Sciences in June, 2015. The results showed the primary and secondary order of influencing factors for each test index. For the coefficient of variation of row spacing, the order was the depth of furrow, forward speed, the length of opener and side angle of opener. For the sowing width mean absolute deviation, the order was the depth of furrow, forward speed, side angle of opener and length of opener. For the quality of fill back, the order was the depth of furrow, forward speed, the length of opener and side angle of opener. The best structure parameter of splitter sliding-opener was obtained through field test. And results showed that the coefficient of variation of row spacing was 10.8%, sowing width mean absolute deviation was 3.83 mm, the quality of fill back was 24.1%, when the forward speed was 0.95 m/s, the opener of the side angle was 60 degree, the opener length was 500 mm, the depth of furrow was 115 mm. The comparison test showed that the V-furrow out of slide-knife opener was better than the ditch out of the traditional shoe-type opener. The reason was that the V-furrow can reduce seed movement and lateral displacement, to improve the consistency of the seed space. Besides, when the combination of the length of slide-knife opener was 500 mm and the side angle of the opener was 60°, the machine can provide enough time for potato seed into furrow, and the quality of fill back was also large so that potato seed can have enough soil cover and have a good ambient temperature and humidity for its growth. The sowing quality for the splitter sliding-opener was better than traditional opener. The opener designed was meeting the requirements of potato planting. The study of potato furrowing seeding device provided with reference to the design of a new theoretical support.
agricultural machinery; optimization; crops; furrow opener; splitter slide-knife; potato; quality of back fill; orthogonal test
2017-10-18
2017-12-14
十三五国家重点研发计划智能农机装备专项“薯类高效收获技术与装备研发”(2016YFD0701600);“马铃薯精量播种技术与装备研发”(2017YFD0700705);现代农业产业技术体系建设专项资金(CARS-10-P22);北方马铃薯全程机械化科研基金项目
吕金庆,研究员,国家马铃薯产业技术体系岗位科学家,主要从事马铃薯新型技术及装备方面研究。Email:ljq8888866666@163.com
衣淑娟,博士,教授,研究方向为农机装备技术与设备。Email:yishujuan_2005@126.com
10.11975/j.issn.1002-6819.2018.04.006
S233.2
A
1002-6819(2018)-04-0044-11
吕金庆,衣淑娟,陶桂香,毛 欣. 马铃薯播种机分体式滑刀开沟器参数优化与试验[J]. 农业工程学报,2018,34(2):44-54.doi:10.11975/j.issn.1002-6819.2018.04.006 http://www.tcsae.org
Lü Jinqing, Yi Shujuan, Tao Guixiang, Mao Xin. Parameter optimization and experiment of splitter sliding-knife opener for potato planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2018, 34(4): 44-54. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.04.006 http://www.tcsae.org
