小型茶树开沟和施肥一体机的设计和仿真
2018-07-10叶自旺胡树良李昊达
李 竞,叶自旺,胡树良,梁 策,李昊达
(广西大学 机械工程学院,南宁 530004)
0 引言
茶叶是世界著名的三大饮料之一,具有清头目、醒精神、解烦渴、利小便、消食积及解毒等功效,一直深受广大消费者的喜爱。全国分布有几大茶叶种植区,广西就是其中一个重要的茶叶生产区。由于广西为丘陵地带,且自然条件恶劣,使得茶叶的种植工作主要依靠手工的方法进行。另外,茶树主要种植在丘陵山地等地带,土地紧实,不易进行开沟工作,单纯依靠手工进行开沟和施肥显然劳动强度大,影响了茶叶的经济效益和社会效益,使得纯手工的茶树开沟和施肥难以满足日益增长的茶叶需求。
为了解决纯手工的茶树开沟和施肥劳动强度大等问题,本文提出了一种小型茶树开沟和施肥一体机,为解决茶树开沟和施肥过程中纯手工作业劳动强度大的问题提供了新思路,并为应对实际开沟和施肥过程中存在的问题提供了解决方案。在小型茶树开沟和施肥一体机的设计过程中,进行适应性设计,实现了小型茶树开沟和施肥一体机的刀具升降功能及在开沟过程中进行自动施肥的功能。同时,对设计方案进行运动仿真,确定该机械的可行性设计方案,避免产生干涉等问题。另外,对小型茶树开沟和施肥一体机进行试验,获得数据,以此来优化小型茶树开沟和施肥一体机的结构及零部件的尺寸,在满足社会需求的情况下实现小型茶树开沟和施肥一体化。
1 装置的结构设计及工作原理分析
1.1 小型茶树开沟和施肥一体机的结构设计
小型茶树开沟和施肥一体机主要由3大部分组成,分别为车架、升降机构及电机传动机构。其中,升降机构主要应用升降杆上的套筒在升降导槽上做滚动运动而使得升降架进行上下运动,从而带动开沟刀具升降运动的原理,同时应用了螺纹自锁的原理,使得升降架在螺杆的自锁作用下进行开沟刀具的定位,开沟刀具则在转盘的调节下处于开沟和不开沟状态。在电机传动机构中,通过减速机和皮带的带动,使得电机可以通过驱动开沟刀具进行旋转运动;同时,考虑到实际工作过程中动力因素,为电机传动机构配备了减速机进行动力的传动,起到减速增距的作用,从而保证实际工作中的开沟作业;为了保持皮带的张紧力,需要增加张紧轮,以保证皮带的传输效率。运用三维造型软件UG进行三维造型,具体结构如图1和图2所示。
1.2 小型茶树开沟和施肥一体机的传动部分的设计
本文主要针对小型茶树开沟和施肥一体机中的电机传动机构进行设计,以此来保证小型茶树开沟和施肥一体机获得足够的动力,满足生产需要。
此处选择的皮带类型为普通A型V带,设置两皮带轮的距离为a=500mm,大带轮的直径为d2=315mm,小带轮直径d1=90mm,由此可计算出小带轮与大带轮的包角分别为∂1和∂2,即
此时,选择的皮带轮包角都大于120°,可保证皮带与带轮的接触面产生的总摩擦力很大,使皮带的传动能力提高,保证了开沟需求。
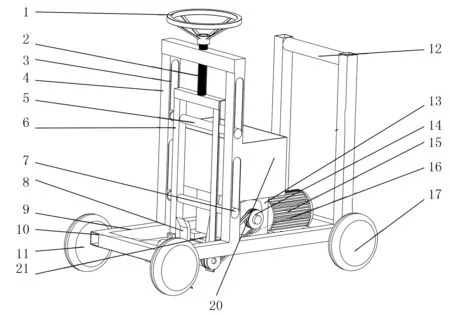
图1 小型茶树开沟和施肥一体机的三维造型
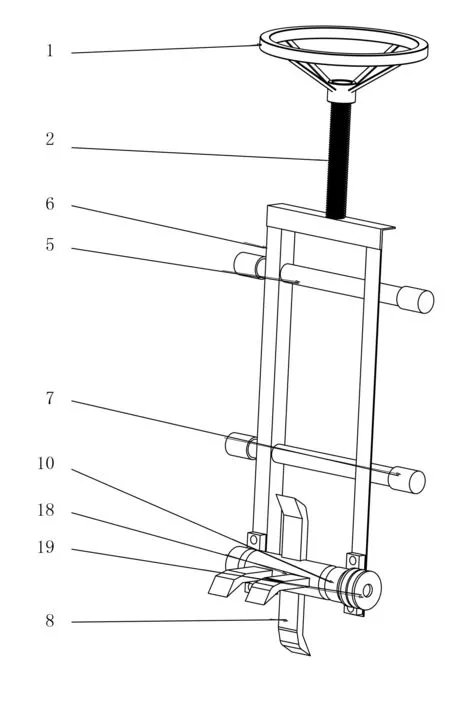
1.转动手盘 2.螺杆 3.升降导槽 4.升降固定架 5.升降杆 6.升降架 7.升降杆套筒 8.开沟刀片 9.机底架 10.滚动轴承座 11.前轮 12.把手 13.减速机 14.大带轮 15.电机 16.皮带 17.后轮 18.开沟刀具 19.小带轮 20.肥料收集箱 21.肥料输出管
1.3 小型茶树开沟和施肥一体机的工作原理分析
小型茶树开沟和施肥一体机是一种能够实现茶树开沟和施肥一体化、同时具有刀具升降功能及在开沟的过程中进行自动施肥功能的农业机械设备,其整体的运动是靠电机在驱动开沟刀具旋转过程中推动小型茶树开沟和施肥一体机向前运动;当开沟刀具不工作时,可通过推动把手使得小型茶树开沟和施肥一体机向前运动,通过旋转转动手盘,使得升降机构在套筒升降导槽的滚动辅助作用下让开沟刀具进行升降运动;同时,在转动手盘的下方通过螺杆上螺纹的自锁作用能够实现开沟刀具的定位作用,使得开沟刀具能够悬停在一定的高度,方便进行作业。
车架由升降导槽、升降固定架、机底架、前轮、把手、后轮、肥料收集箱及肥料输出管组成。其中,升降固定架和前轮位于小型茶树开沟和施肥一体机的前方,升降固定架竖直安装,与肥料收集箱焊接在一起;肥料输出管安装在肥料收集箱的底部,在升降固定架上开有4处升降导槽,使得升降机构上的升降架能够在上面进行竖直升降运动;把手和后轮安装在小型茶树开沟和施肥一体机的后方,机底架位于整体装置的底部,起到支撑的作用;车架起支撑作用,主要用来放置电机及开沟刀具等机构。
升降机构由转动手盘、螺杆、升降杆、升降架、升降杆套筒、开沟刀片、滚动轴承座及开沟刀具组成。转动手盘位于装置的最上方,转动手盘下连接有螺杆,螺杆穿过带有螺孔的升降固定架,可利用螺纹的自锁作用实现开沟刀具在竖直方向上的定位;在螺杆的底部用螺母连接有升降架,升降架上平行分布有两根升降杆,在每根升降杆的首尾两端上安装有套筒,通过套筒的滚动作用可以实现升降机构的升降运动;在升降架的底端安装有两个滚动轴承座,其中间分布有开沟刀具,开沟刀具由4片开沟刀片组成,4片开沟刀呈现“T”字形分布,在横向方向上左右两边分别分布有1片开沟刀,在纵向方向上同向分布有两片开沟刀。升降机构是小型茶树开沟和施肥一体机重要组成部分,主要通过旋转转动手盘穿过带有螺孔的升降固定架,从而使得机构作上下升降运动,以及螺纹的自锁功能,实现开沟刀具的调节定位作用,使得开沟刀具可以按照预定的高度进行开沟,保证了小型茶树开沟和施肥一体机工作的可靠性。
电机传动机构由减速机、大带轮、电机、皮带及小带轮组成,电机通过螺栓和螺母固定在车架上,减速机也通过螺栓和螺母固定在车架上,电机和减速机通过套筒连接在一起。在减速机的输出轴上安转有大带轮,小带轮安装在开沟刀具的同轴上,大带轮通过皮带可以带动小带轮进行运动,进而带动开沟刀具进行旋转运动。电机传动机构作为小型茶树开沟和施肥一体机的动力部分,主要通过电机和减速机的作用带动皮带转动,使得开沟刀具进行旋转,实现小型茶树开沟和施肥一体机的功能。
2 小型茶树开沟和施肥一体机的动态仿真
在UG中做好三维造型后直接在UG中进行运动仿真,目的在于验证设计机械的可运行性及是否存在机械运动过程中的零件干涉问题。对该装置的整体进行仿真约束,模拟该装置在实际使用过程中的运动情况,从而优化小型茶树开沟和施肥一体机的结构。对装置的整体进行了仿真约束(见图3),主要对其在实际工作中所具有的运动进行约束,真实再现了小型茶树开沟和施肥一体机的工作环境。

图3 小型茶树开沟和施肥一体机的仿真约束图
2.1 开沟刀的仿真
对小型茶树开沟和施肥一体机进行整体仿真运动约束之后,现在着重对升降机构的开沟刀具在x、y和z方向上的位移运动进行仿真。由于其在x轴方向的坐标是不变的,因此在这里省略了对小型茶树开沟和施肥一体机的开沟刀在x轴方向的坐标变化图。在仿真运动的过程中,充分考虑了零件干涉及实际工况会出现的各种问题,以此来确定升降机构的开沟刀具在y和z方向上的位移量,确保运动仿真的结果能够满足实际生产需要。通过对这两个方向上的位移量的分析,可确定小型茶树开沟和施肥一体机的开沟范围,从而验证该小型茶树开沟和施肥一体机的运动可靠性和实用性。
这里选择开沟刀尖上的一个点来研究小型茶树开沟和施肥一体机的开沟刀具进行自身旋转时在z方向上位移量的运动仿真。小型茶树开沟和施肥一体机的开沟刀具进行自身旋转时在z方向上的位移范围图如图4所示。
小型茶树开沟和施肥一体机的旋转刀具在z方向上的最大位移量为:z=396.08-141.29=254.79mm。
此时,由于旋转刀具在电机的驱动下运动时y轴和z轴方向的位移量是一样的,因而省略了小型茶树开沟和施肥一体机的旋转刀具在y方向上的运动位移量图。
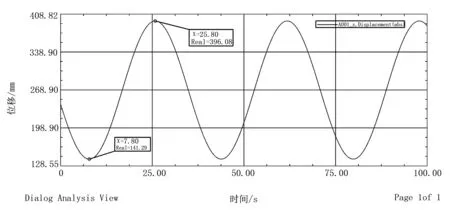
图4 小型茶树开沟和施肥一体机的开沟刀在z方向上的位移量
2.2 小型茶树开沟和施肥一体机的升降架的仿真
对小型茶树开沟和施肥一体机进行整体仿真运动约束确定其运动状况之后,着重研究升降机构上的升降架在x、y和z方向上的位移运动。由于其在x和z轴方向的坐标是不变的,因此省略了对小型茶树开沟和施肥一体机的升降架在x和z轴方向的坐标变化图。在仿真运动的过程中,充分考虑了零件干涉及实际工况会出现的各种问题,以此来确定升降机构的升降架在y方向上的位移量,确保运动仿真的结果能够满足实际生产需要。通过对这一个方向上的位移量的分析,可确定小型茶树开沟和施肥一体机做升降运动的范围,从而验证该小型茶树开沟和施肥一体机的运动可靠性和实用性。
通过仿真运动约束,限制了升降机构的上升高度,因为过高的上升高度对开沟的范围没有太大的影响。由于主要的工作机构是开沟刀具,因此选择开沟刀尖上的一个点来研究小型茶树开沟和施肥一体机的升降架在y方向上的位移量的运动仿真。小型茶树开沟和施肥一体机的升降架在y方向上的位移范围图如图5所示。
小型茶树开沟和施肥一体机升降架在y方向上的最大位移量为:y=-15.80-(-165.80)=150.00mm。
通过对小型茶树开沟和施肥一体机的开沟刀具的运动仿真,可以确定其开沟刀具在y和z轴方向上的最大位移量为257.79mm,升降架在y轴方向上的最大位移量为150mm。
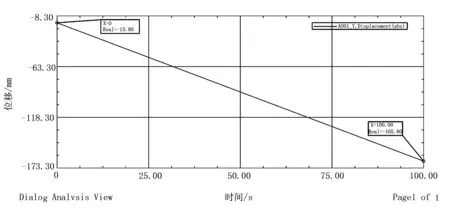
图5 小型茶树开沟和施肥一体机的升降架在y方向上的位移量Fig.5 The amount of displacement of the small tea tree ditch and fertilizers of the lift frame in the y direction
3 小型茶树开沟和施肥一体机仿真结果分析
在上面对小型茶树开沟和施肥一体机的运动仿真中可以得知装置运行的稳定性,在仿真运动的过程中充分考虑了零件干涉及实际工况会出现的各种问题,确定了小型茶树开沟和施肥一体机的开沟刀具及升降架在x、y、z方向上的位移量。
以车轮的最低点作为地面的高度,同时以升降架的最低点进行运动仿真,此时可以得到开沟刀在进行工作时的开沟范围及开沟深度。图6为小型茶树开沟和施肥一体机开沟刀具的开沟范围及开沟深度图。
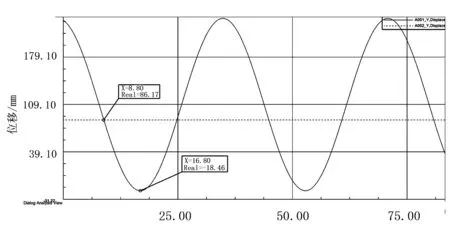
图6 小型茶树开沟和施肥一体机的最大开沟深度图
由以上各图可以得到开沟刀具的开沟最大深度h=86.17-(-18.48)=104.65mm,能够满足生产需要。
4 试验及分析
由仿真可知:小型茶树开沟和施肥一体机是可行的。经过对茶树生活环境及生长规律的研究,不断优化产品的机构,确定各零件的具体数值及装配工艺,并进行试验和效率测试,以保证小型茶树开沟和施肥一体机的工作效率明显高于人工开沟和施肥,并最大限度地减轻农民们的劳动强度。对小型茶树开沟和施肥一体机进行实地测试,可得到小型茶树开沟和施肥一体机的强度满足实际要求,且具有很好的开沟和施肥效率,同时开沟和施肥的速度比纯手工作业快将近2倍。小型茶树开沟和施肥一体机结构紧凑,开沟效率高,对茶树的开沟和施肥有很好的适应性及良好的应用前景,其实物图如图7、图8所示。

图7 小型茶树开沟和施肥一体机整体实物图

图8 小型茶树开沟和施肥一体机部分实物图
5 结论
经过仿真及实地测试可知:小型茶树开沟和施肥一体机具有良好的工作可靠性和适应性,实际工作效率是纯手工作业的将近2倍。小型茶树开沟和施肥一体机结构紧凑,开沟效率高,对茶树的开沟和施肥有很好的适应性,具有明显优于传统手工的优势,可满足社会生产需要,极具发展前景。
