Yasukawa多轴伺服驱动的通信控制及其上位机开发
2018-01-23
(广东工业大学,广州 510006)
0 引言
Yasukawa驱动器及其电机占有自动化市场份额巨大,属于中高档伺服驱动产品,具有优质的运动控制性能。本文尝试直接采用其Σ-V系列伺服驱动器作为控制器,以减少中间环节降低成本投入为目的,通过RS422总线,结合MEMOBUS RTU通讯协议及其电机,构建形成具有单通道通讯控制的多轴伺服驱动技术方案,如图1所示。并在Mircrosoft Visual Studio 2012平台上以C#语言编程,开发Yasukawa多轴伺服驱动运动平台操作的上位机,进一步扩展Yasukawa丰富的操作功能,实现上位机对整个伺服系统的可靠监控,使伺服系统各个参数的调节具备可观,实现实时控制,操作简单,便于快速应用到各种自动化生产领域,减少配套设备的开发周期,降低硬件需求的成本。
1 Modbus RTU协议在伺服驱动控制中的实现
1.1 PC与Yasukawa伺服驱动器的链路方式
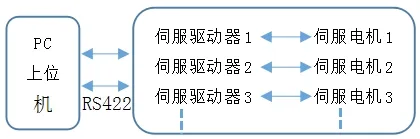
图1 多轴伺服驱动技术方案
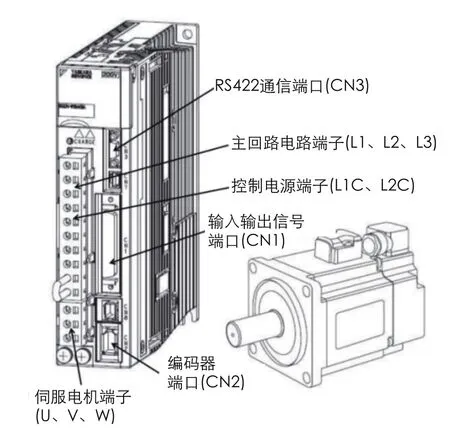
图2 Yasukawa伺服驱动器及其电机
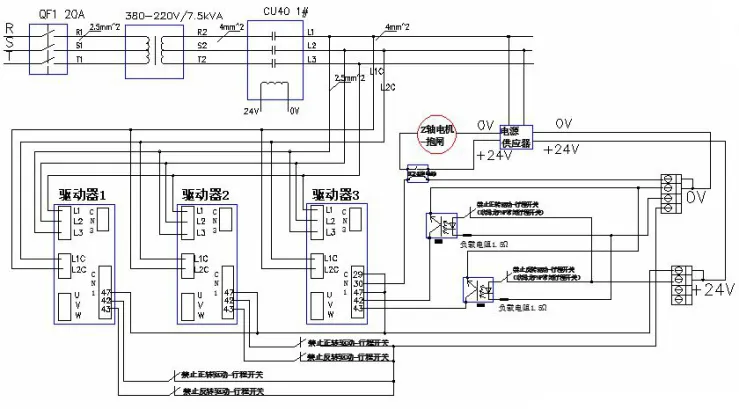
图3 电路图及I/O接线图
Yasukawa伺服驱动器在Memobus网络中作为从站,通过RS422现场总线可以设置多个从站[1]。其外观图如图2所示。Yasukawa伺服驱动器[2]提供CN3端口,如图4的各驱动器的通信链路,以现场总线RS422转USB与PC端通信,实现单通道的数据传输方式。另外其输入输出信号CN1端口的I/O采用部分端子如图3所示,分别为伺服准备就绪输出29(S-RDY+)、伺服准备就绪输出30(S- RDY-)、电源DC24V输入47(VIN)、禁止正转驱动42(P-OT)、禁止反转驱动43(N-OP)。三轴运动方向上还安装了两对行程开关和一对光电感应传感器防止伺服电机超行程发生安全事故。
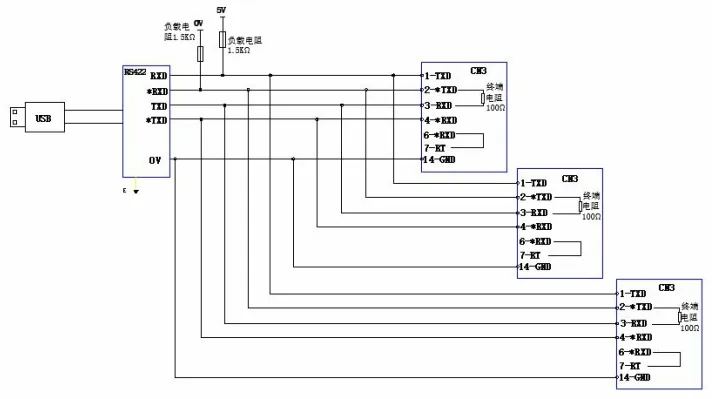
图4 各驱动器的通信链路
1.2 Yasukawa伺服驱动器寄存器规格
Yasukawa伺服驱动器提供多种功能模式,本文的控制方案上位机开发主要集中在操作、跟踪区域(2000H~2FFFH)、机种定义区域(C000H~CFFFH)及监视器区域(E000H~EFFFH)方面的寄存器[3]。
其中在操作模式中设定【JOG运行模式】,即可进行JOG运行,相关的寄存器及操作模式设定寄存器2000H如表1所示,操作设定2001H设定值如表2所示。
而在操作模式中设定【程序点动运行】可以根据用户参数中预先设定的运行曲线、移动距离、移动速度、加减速时间、反复运行次数可连续自动运行。且执行中为位置控制模式。相关寄存器如表2所示。
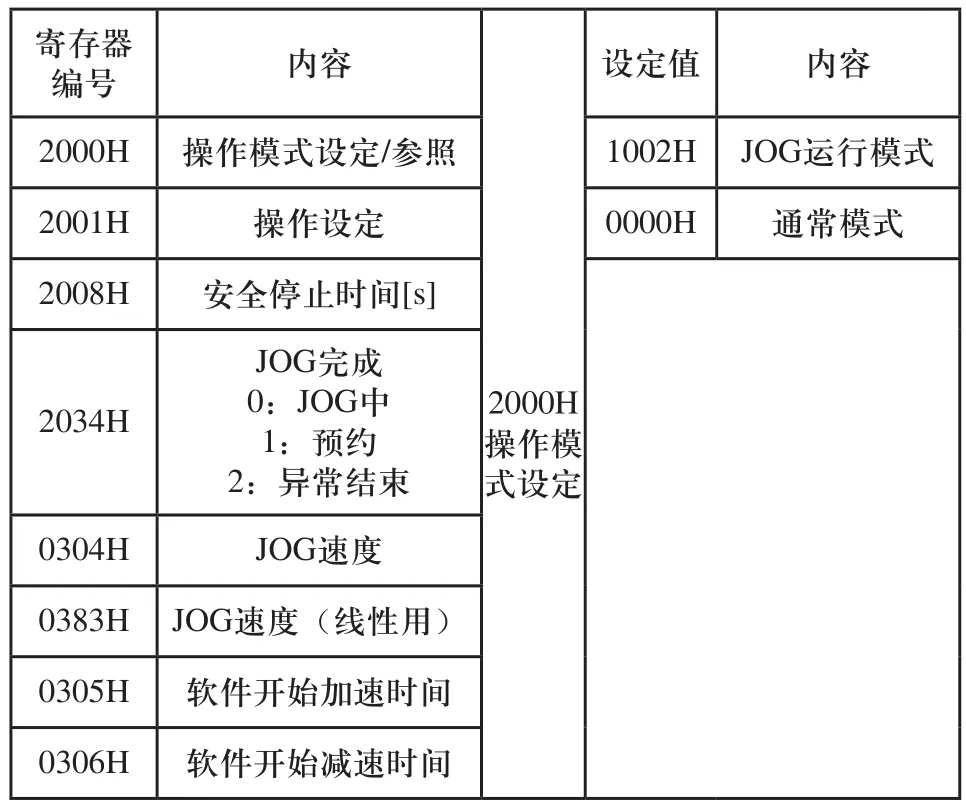
表1 JOG运行相关寄存器及操作模式2000H设定值
1.3 PC与Yasukawa伺服驱动器的数据传输方式
Yasukawa伺服驱动器要求高效的传送速度为19200bps,数据位为8bit,停止位为1bit,校验位为偶校验,通信方式为全双重通信[3]。
根据其驱动器的Memobus通信方式的信息格式如表3所示,指令/应答的信息格式相同,都是由从站地址、功能代码、数据以及出错校验这4个区域构成[2]。主站向从站发出指令信息时,设定从站的地址,例如从站地址:01,代表第一伺服驱动器。从站只提取针对自己的指令信息。从站在向主站返回应答信息时,设定自己的地址也为:01。主站通过功能代码指定想要从站执行的功能,从站根据功能代码,执行被指定的功能。执行后,返回应答信息时,正常应答信息为设定相同的功能代码,异常应答信息为设定功能代码+80H。根据此信息,主站从返回哪个功能代码就能知道相关的应答信息。设定每个功能代码所定义的信息,即数据。为了检出由于信号传送所导致的信息错误(bit的变化),需要设定出错校验用数据。出错校验通过CRC-16(同步冗余校验)来执行。
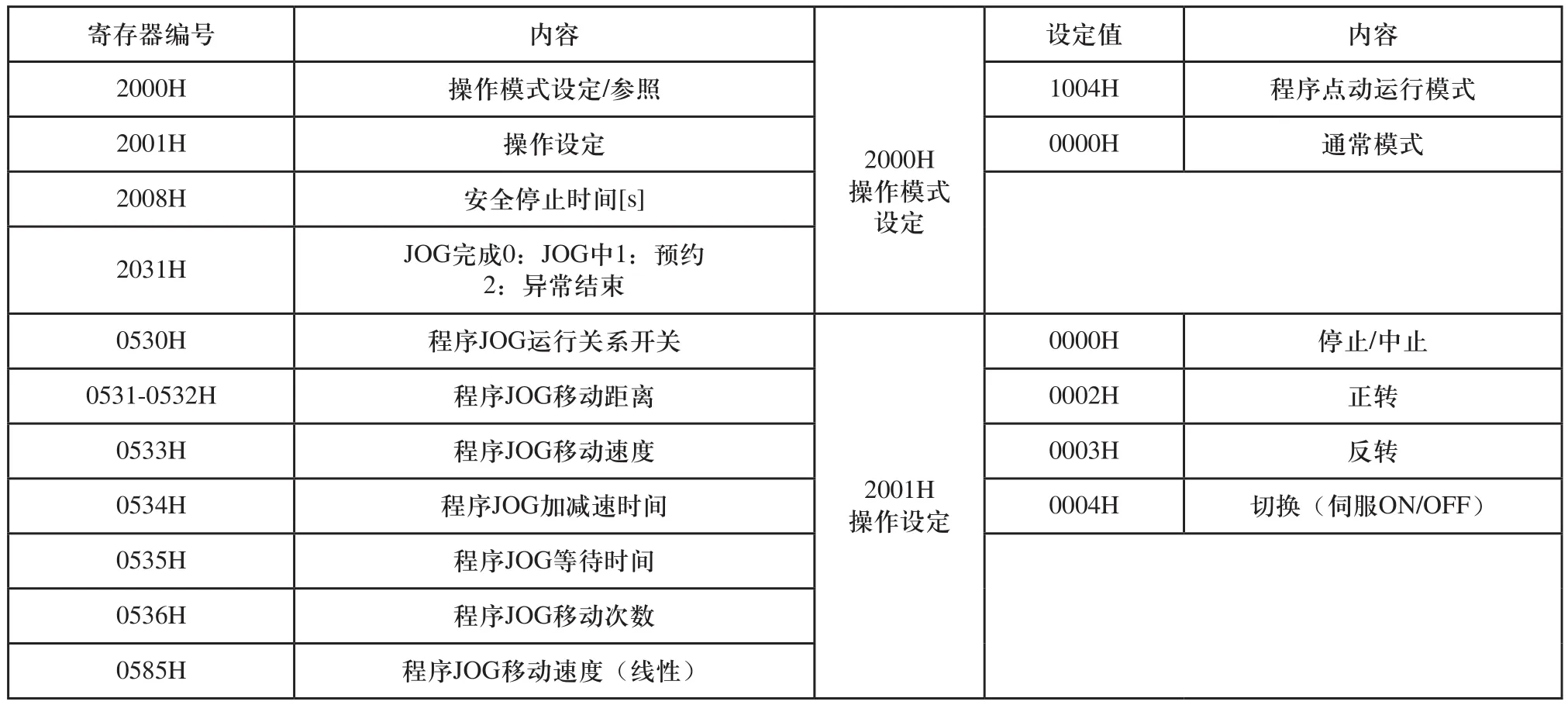
表2 程序点动相关寄存及2000H与2001H设定
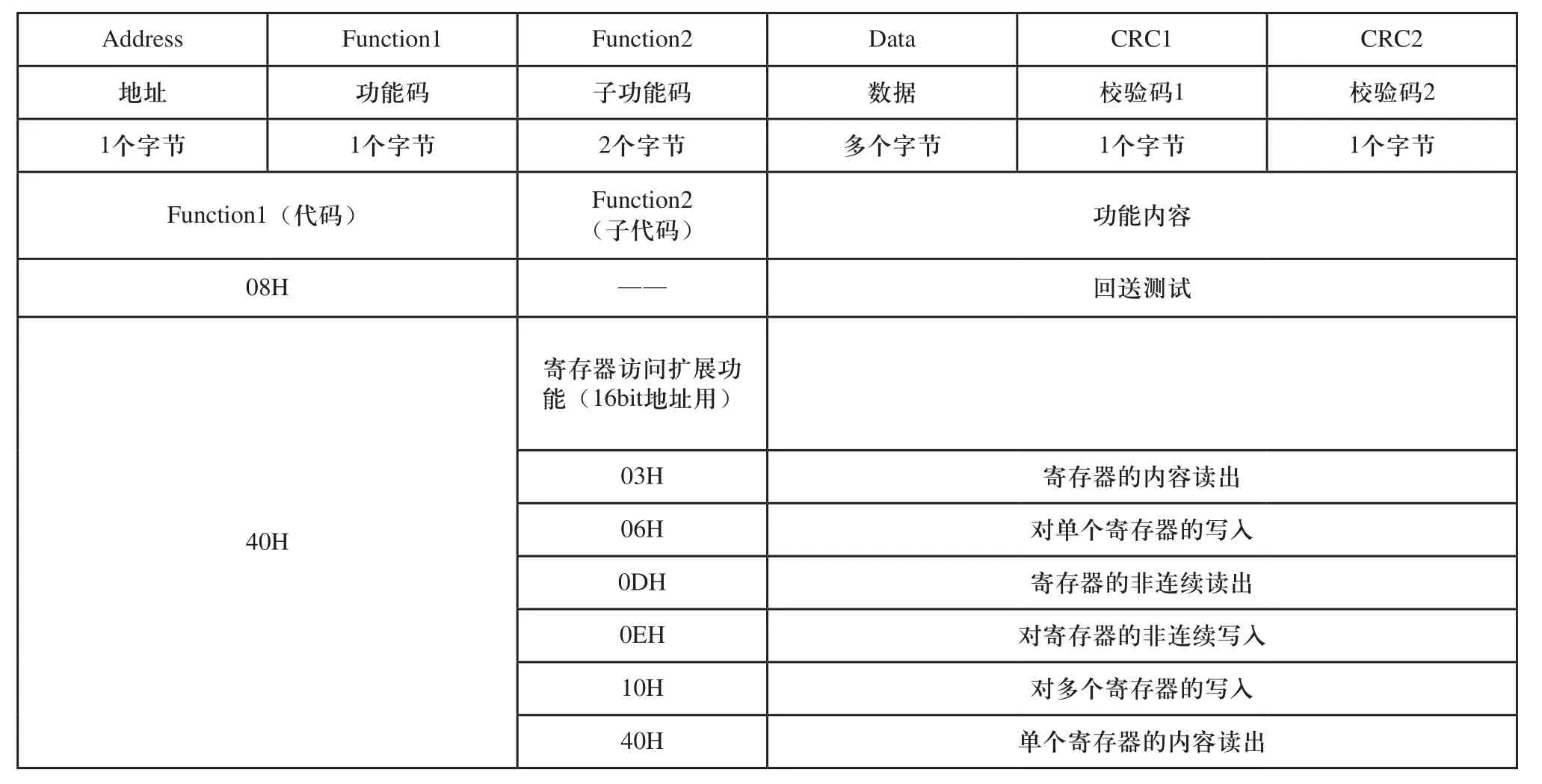
表3 Memobus数据帧结构及功能码表
以单个寄存器的写入(子功能代码:06H)为例,主站将写入的数据分割为高位8bit和低位8bit后,发送指令信息。如将数据029EH写入到3#从站的寄存器006AH中,如表4信息示例所示。
同样,按照协议传输方式和Memobus功能码可以编程实现对Yasukawa伺服驱动器实际参数的读取和设置,从而实现伺服电机的多种方式(原点搜索模式、位置模式、速度模式等)控制。按照Memobus协议,最多可实现连接15轴(电缆总长度最长30m)[4],因此,从站的通信方式简化清晰,显示了Memobus协议控制方式强大的可扩展性。
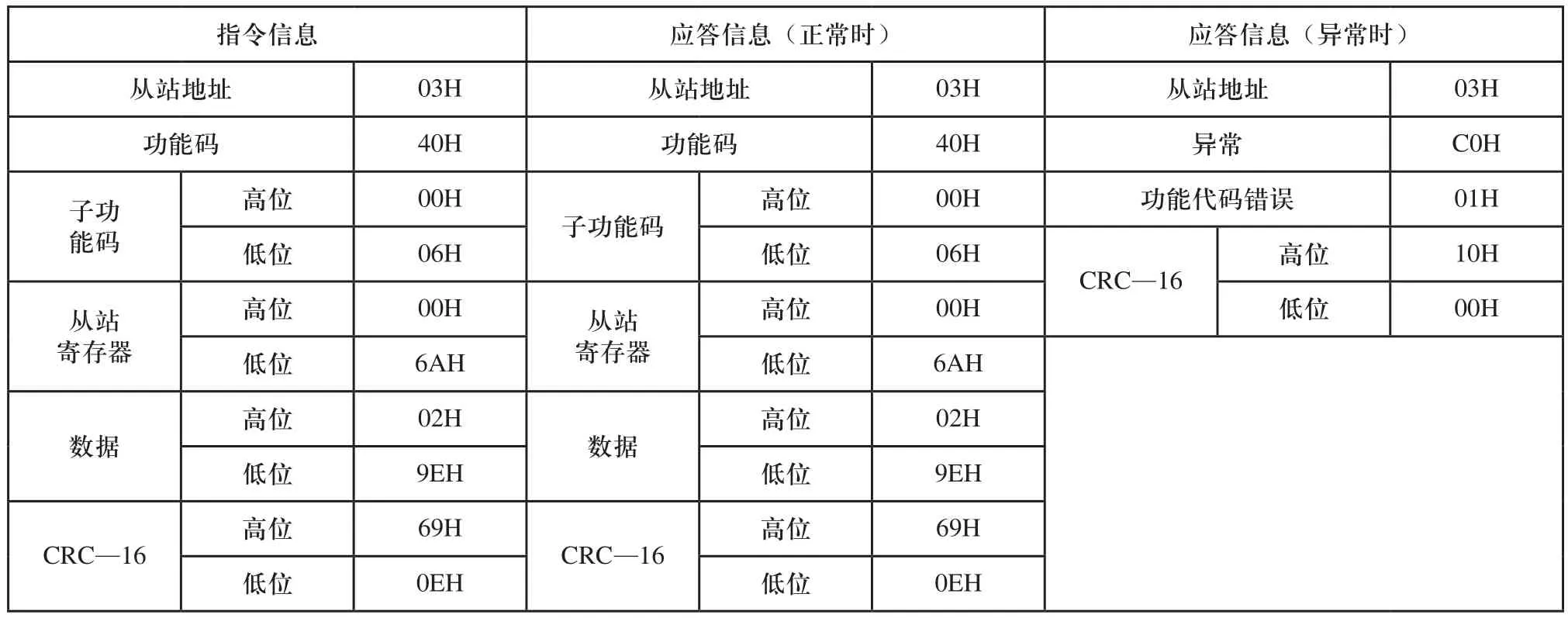
表4 信息示例
2 运动平台上位机软件编程
该软件结合Mircrosoft Visual Studio 2012平台以C#语言编程,设计指令动态连接库,进行多轴伺服驱动运动平台操作的上位机开发。
2.1 指令动态链接库设计及CRC校验实现方式
指令动态链接库包括【各轴伺服驱动器/电机监控】、【各轴运动操作方法】、【驱动器运作模式监控】、【程序点动模式完成信号监控】、【各轴伺服ON/OFF】、【CRC列表及校验码计算】等等。如:【X轴伺服驱动器/电机监控】的非连续读取寄存器的信息指令。
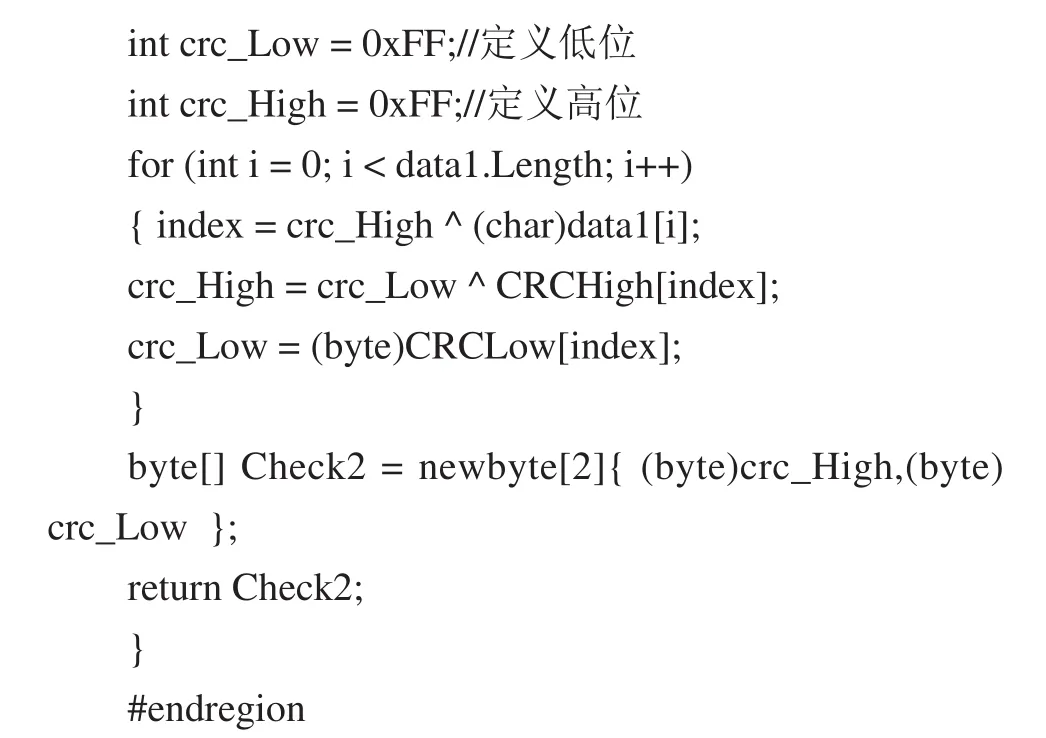
在自定义类里,编写实现产生CRC校验码的方法,其中采取高效率的查表法,使整体代码运作效率提高,计算CRC16循环校验码关键代码如下:
2.2 关键线程的实现方式
Yasukawa驱动器的数据监控、跟踪及自动运行需要同步线程来实现,其中软件在自动运行中所定义的线程如下:
3 综合应用测试
Yasukawa伺服驱动器提供位置、速度、扭矩3种基本控制模式[1],根据平台的实际用处,本设计采用位置模式和速度模式,设计PC上位机与各个从站设备的异步串口通信程序及操作程序,其中程序设计流程图如图5所示。
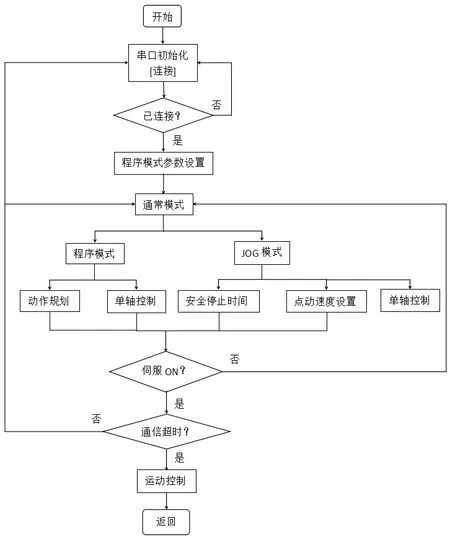
图5 程序设计流程图
上位机系统界面如图6所示,其中包括实现单轴控制、多轴顺序控制、定距点动、动作路线规划、归位、自动运行、监控、脱机模拟运行、指令输入输出状态反馈的功能。点击【扫描端口】可获得当前计算机可用端口,并通过计算机的设备管理器查看确定链接的端口。确定那一个端口后并可以点击【连接】连接系统。其余的端口可在拔掉RS422总线,在计算机上可进行软件的模拟运动操作,除以下框架之外,模拟运动操作不显示信息,分别为{伺服/电机信息}{轴回归操作}{模式监控}框架。连接成功后。{伺服/电机信息}框架中会显示驱动器和电机方面的信息。
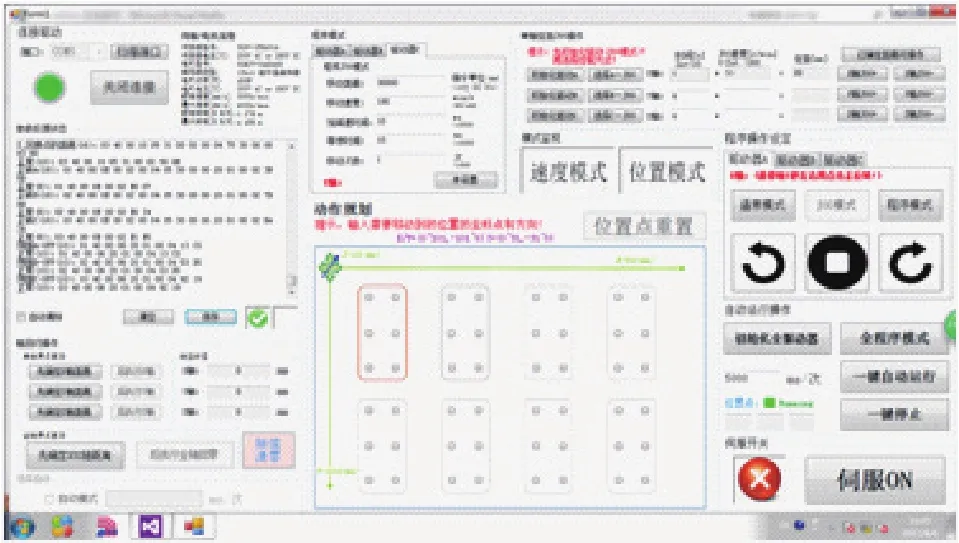
图6 上位机系统界面
本软件可实现三种操作功能:单轴操作和多轴顺序操作及自动运行操作。单轴操作方法又分两种:{单轴定距JOG操作}和{程序操作设定}。且操作间有提示及安全注意。下面以单轴操作为例实施检测。
驱动X轴:点击【初始化驱动A】+【选择A-JOG】+输入【时间】+输入【JOG速度】+【先确定距离再操作正反转】+{程序操作设定}的【驱动器A】+【伺服ON】+【X轴JOG+】或【X轴JOG-】。即可实现X轴的定距运动操作。停止则是:点击【初始化驱动A】或【伺服OFF】。运动后,{轴回归操作}框架能显示各轴运动的总距离。而在{动作规划}框架中可设置48个输入点,X轴的行程为500mm,Y轴的行程为1000mm,Z轴的行程为100mm,其中以速度模式和位置模式运行时的界面如图7、图8所示。

图7 监控驱动器的速度模式

图8 监控驱动器的位置模式
目前,上位机测试稳定,定位精确,通信时效性强,操作直观,简洁清晰。
4 结论
本项目研究所设计的通信控制方案,基于C#语言进行Memobus串行通信,可实现PC上位机直接控制伺服驱动器,进而实现了多轴伺服驱动的运动控制。本系统通过友好的人机交互界面,能进一步扩展Yasukawa伺服驱动丰富的操作功能,使各个参数的调节具有可观,实时控制性强,系统性能可靠,硬件结构简单,因而能快速应用到自动化生产领域中去,对减少配套设备开发周期,降低硬件需求成本有现实意义。
[1]Yasukawa电机官方网站.MEMOBUS通信规格书[900-017-771]ΣⅤシリーズACサーボパックMEMOBUS通信仕様書(中)[Z].
[2]Yasukawa电机官方网站.Σ-Ⅴ系列用户手册设计、维护篇模拟量电压、脉冲序列指令型/旋转型(SICPS80000045B)[Z].
[3]Yasukawa电机官方网站.信息通信寄存器规格书[900-018-129]Σ-ⅤシリーズACサーボドライブメッセージ通信レジスタ仕様書(中)[Z].
[4]Yasukawa电机官方网站.Yasukawa硬件连接[900-024-784]Σ-ⅤシリーズACサーボパックMEMOBUS通信仕様書(ハードウエア接続)(中)[Z].
