基于图像潜在低秩结构的去噪方法
2017-06-08吴瑞平蒋红星叶修梓
吴瑞平,蒋红星,叶修梓
(温州大学数学与信息科学学院,浙江温州 325035)
基于图像潜在低秩结构的去噪方法
吴瑞平,蒋红星,叶修梓
(温州大学数学与信息科学学院,浙江温州 325035)
提出了一种基于图像潜在低秩结构的去噪方法.该方法首先对原始图像的子块进行空间变换从而获得它们的低秩纹理,然后再利用SVD方法来压缩这个低秩纹理,从而得到最终的去噪结果.实验结果表明,该方法的去噪结果是干净、清晰的,并且该方法甚至可以对输入图像中的很小的污点进行修复.与非局部均值滤波算法相比,本文所给方法的去噪性能、尤其是对特征信息的保持性能均有显著提高.
图像去噪;非局部均值;低秩结构;旋转;凸优化
图像去噪是图像处理的一个重要环节,目的是去除图像中的各种噪声污染,同时又能保持图像的结构特征如边缘、纹理等.图像去噪效果的好坏直接影响着后续图像处理工作的进行,消除图像噪声对于图像处理的研究有着非常重要的意义.目前,图像去噪算法总的来说可以分为两类:局部的方法和非局部的方法.局部的方法就是用某种核与图像做卷积运算,用当前像素所在邻域内的所有像素去估计该像素以实现去噪,主要有邻域平均去噪法,基于小波、多小波、轮廓波等变换域以及基于过完备字典的稀疏表示图像去噪法,局部自适应方法.因局部的方法没有利用图像的全局结构信息,所以去噪后图像会出现过于模糊、细节丢失的现象.非局部方法就是像素之间在空间位置上不存在实质性关系,只与用来度量像素之间相似性的图像片有关,是一种基于图像块相似性度量的去噪方法.2005年,Buades等人①Buades A,Coll B,Morel J M. A non-local algorithm for image denoising [C] // 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05). IEEE,2005,2: 60-65.提出了一种非局部均值(Nonlocal Means,NLM)图像去噪方法,该方法通过加权平均一些相似像素值来估计当前像素的真实值.NLM方法的提出为图像去噪领域开辟了一个新的空间,将图像去噪的研究推向了一个新的高潮,一系列对NLM方法的改进算法被相继提出.对NLM方法有效的改进算法主要有:Kervrann等[1]提出的优化的空间自适应(Optimal Spatial Adaptation,OSA)NLM方法(OSA-NLM),该方法从相似性度量和参数优化两个方面对NLM方法进行了改进,实现了有效的图像去噪;2011年,Deledalle等人[2]提出的一种形状自适应的NLM方法(SA-NLM),该方法能够较好地保持弱梯度信息,避免在图像产生“伪影”的问题;对NLM方法最有效的改进是2007年Dabov等人[3]提出的块匹配三维(BlockMactching3D,BM3D)协同滤波方法.在NLM方法中,相似权系数由以当前像素点与其邻域内其它像素点为中心的图像块之间的相似性来决定.图像块比单个像素点蕴含的信息更加丰富,能更好地描述图像的特征,因此能够更好地度量像素之间的相似性,在去除噪声的同时也能有效地保持纹理等具有重复结构的特征.然而,由于NLM方法中的权重难以选择,Rajwade等人[4]提出了一种对相似图像块所组成矩阵进行奇异值分解并截断的去噪方法,该方法能够有效地处理高斯噪声.尽管上述基于图像块相似性的非局部去噪方法的去噪效果较好,但还是存在着明显的不足,主要表现在:1)图像块内部的结构没有被有效地利用;2)只能处理高斯噪声.基于此,本文提出了一种新的基于图像潜在低秩结构的去噪方法.首先,对图像进行旋转变换以获取图像的低秩纹理,再利用SVD的方法对这个低秩纹理进行压缩,就可以得到非常好的去噪效果.对比NLM算法,本文的低秩压缩算法去噪效果更佳显著.由于低秩纹理的规则或对称的结构特征用局部的像素点是无法描述的,只能从图像的较大范围区域中获取,所以获取的图像特征具有很好的整体性,包含的特征信息也更为丰富.
1 噪声模型和非局部均值滤波方法
1.1 噪声模型
假设噪声信号为与图像无关的加性高斯白噪声,噪声模型为:

其中,Y(i)为受污染的噪声图像,X(i)为未受噪声干扰的原始图像,N(i)为均值为0、方差为σ2的高斯白噪声.图像去噪的目的是从噪声图像Y(i)中获取原始图像X(i)的最优估计值X~(i),使其尽可能地接近原始图像X(i).
1.2 非局部均值滤波算法

其中权重值w(i,j)是由像素点i和像素点j之间的相似度决定的,满足条件:0≤w(i,j)≤1,且∑jw(i,j)=1,而像素点i和像素点j之间的相似度由它们的灰度值矩阵Ni与Nj之间的相似度决定,其中Ni表示以像素点i为中心的图像子块区域,Nj表示以像素点j为中心的图像子块区域.各区域之间的相似度由它们的高斯加权欧氏距离d(i,j)来度量,其定义为:,其中β为高斯核的标准差.邻域之间灰度值矩阵越相似,相应的像素点平均权重就越大,权重w(i,j)定义为:为归一化因子,h为指数函数的衰减因子,控制指数函数的衰减速度,也影响滤波的程度和去噪性能.
2 旋转不变的低秩纹理
2.1 低秩纹理的定义
本文中,考虑一个定义在平面空间R2上的2D纹理图像,其矩阵表示为I0(x,y),当一维函数族张成一个有限的低维线性子空间时,则称0I是一个低秩纹理.即:

对于一个较小的正整数k,若r存在,则可称0I为一个秩为r的纹理.通过该定义,可以很容易地发现,规则或对称的模型通常具有低秩纹理.
2.2 变换的低秩纹理
虽然在3D空间中许多平坦的表面或者结构模型呈现的是低秩纹理,但它们的图像却不一定具有低秩性.假设一个位于平面空间的低秩纹理图像为A(x,y),在一定的视角下观察所获取的图像为I(x,y),用数学公式表示为:

其中τ为一个22R→R的空间旋转变换函数,在本文中,假设变换τ为2D仿射或投影变换.通常情况下,经过变换后的纹理I(x,y)不再是低秩的了,例如,一个水平边界的秩为1,当把它旋转45°时,它就变成了一个满秩的对角线边界.
观察到的图像除了旋转变换的干扰外,还会受到周围环境的噪声污染或遮挡的影响,因此,对于观测图像可以建立如下模型:

其中,矩阵E为图像中的噪声、遮挡等干扰量.在本文中,假设低秩纹理图像只有很小一部分受到噪声污染,因此,噪声矩阵E是一个稀疏矩阵.我们的目的是从观测图像中恢复低秩纹理图像A,得到变换变量τ并且去除噪声变量.
上述问题可以转化为优化问题:

文献[5]中提出,通常情况下,公式(6)中的优化问题在求解关于矩阵A的秩和E的零范数时是NP-难的,但是,基于矩阵的稀疏表示和低秩恢复的迅猛发展,在适当条件下,上述问题可以替换为求解它们的凸包,可参考Candès[6]和Chandrasekaran[7]以及Xiaoqin Zhang[8-9]的论文,即:用矩阵的核范数替换rank( A),矩阵E的1-范数替换,其中核范数为矩阵的所有奇异值之和,1-范数为矩阵中所有元素绝对值之和.因此公式(6)可转化为如下优化问题:

式中的λ与公式(6)中的γ意义相同.对于公式(7),前面的目标函数已经是凸问题,但是,约束条件I◦τ=A+E 仍是非线性的,因此公式(7)中的问题仍然是非凸的.针对这一难题,可参照Baker[10]等人的论文,将约束条件线性化为:

其中▽I为雅可比矩阵,它的元素为变换函数上各变换参数的增量,则式(7)中的问题可转化为:

经过线性化后,公式(6)中的问题最终转化为公式(9)中的凸优化问题.由于线性化后的问题仅仅是原始非线性问题的一个局部近似,因此,为了使原始的非凸问题收敛到(局部)最小值,本文用迭代的方法来解决这个问题.根据迭代凸优化的方法可得出针对该问题的算法,如下:
算法1
输入:原始纹理图像I∈Rw×h,初始化的变换函数τ(仿射或投影变换),权重参数λ>0.
迭代循环:当目标函数值达到收敛时结束循环,循环过程分为4步:
第二步(内循环):解决线性化问题:

第三步:更新转换函数:τ←τ+Δτ*;
第四步:用得到的优化结果A*,E*,τ*重新初始化参量并进入第二步的内循环;保存结果,循环结束;
输出:优化解A*,E*,τ*.
算法1描述了本文提出的算法的整体算法结构,下面将针对该算法进行详细的分析,并对算法中的计算过程进行优化.
2.3 基于增广的拉格朗日乘数方法(ALM)的快速算法
观察算法1可以看出,整个算法中计算量最大的部分为解决第二步内循环中的凸优化.幸运的是,关于核范数最小化的算法已经有了很快的发展.为了解决公式(9)中的线性化问题,我们利用增广的拉格朗日乘数法对算法1进行优化处理.
将公式(9)转化为增广拉格朗日方程为:

式中,μ>0表示附加在不可行点上的惩罚量,Y为拉格朗日乘数矩阵,表示矩阵的内积,f表示目标函数,R表示约束条件的函数,并且

根据ALM基本迭代方法,我们的问题的ALM基本迭代方法由下式给出:

除非特别指出,本文以下部分都假设μ=ρkμ0,且满足μ0>0,ρ>1.
现在主要集中于如何有效地解决上述迭代方法的第一步.通常情况下,同时关于所有变量A,E和Δτ对目标函数取最小值的计算量是非常大的,因此,本文采用迭代最小方法近似地解决这个问题,即对变量A,E和Δτ一次选取一个变量关于目标函数取最小值:

由于问题的特殊结构,上述的每一个优化问题都是一个简单的形式解,因此,可以一步解出.更精确地说,公式(14)的解可用收缩算子的方法明确地表示如下:

综合以上分析过程,再结合交互式方向方法可将算法1中的内循环过程优化为下面的算法:
算法2
输入:当前经过转化和标准化处理后的图像I◦τ∈Rm×n,该图像关于变换向量τ的雅可比矩阵▽I,权重参数λ>0.
初始化变量:k=0,Y0=0,E0=0,Δτ0=0,μ0≻0,ρ≻1.
迭代循环:当目标函数值达到收敛时循环结束,循环的主要过程为使用交互式方向方法逐个求各个变量的优化值:

用每次循环求得的参数值重新初始化变量,然后再次进入循环求最优值.
保存结果,循环结束.
输出:公式(9)中未知参数的优化解A,E,Δτ.
算法在实际应用中,设定参数μk为满足条件μk+1=ρμk且ρ>1的一个实数序列{μk}.
从算法2中可以观察到,算法中计算量较大的部分都被近似转化为简单的求奇异值分解的过程,因此算法的计算复杂度随之有了很大程度的降低.算法1和算法2共同组成了本文提出的基于矩阵低秩结构提取旋转不变纹理特征从而消除图像噪声的完整算法.
3 算法验证与结果分析
3.1 图像切片上的结果
从上述算法分析可知,只要图像的切片适当大并包含有效的纹理,就能通过解决公式(9)中的优化问题得到低秩的纹理图像A和旋转变换向量τ.
图1是SVD得到的近似解图像.从图1可以看出,取前两个奇异值时就可以得到D的近似解,并且近似解图像不仅是干净清晰的,而且还去除了原始图片中所有损坏的部分,因此还可以用这个方法来改进低质量的图像.
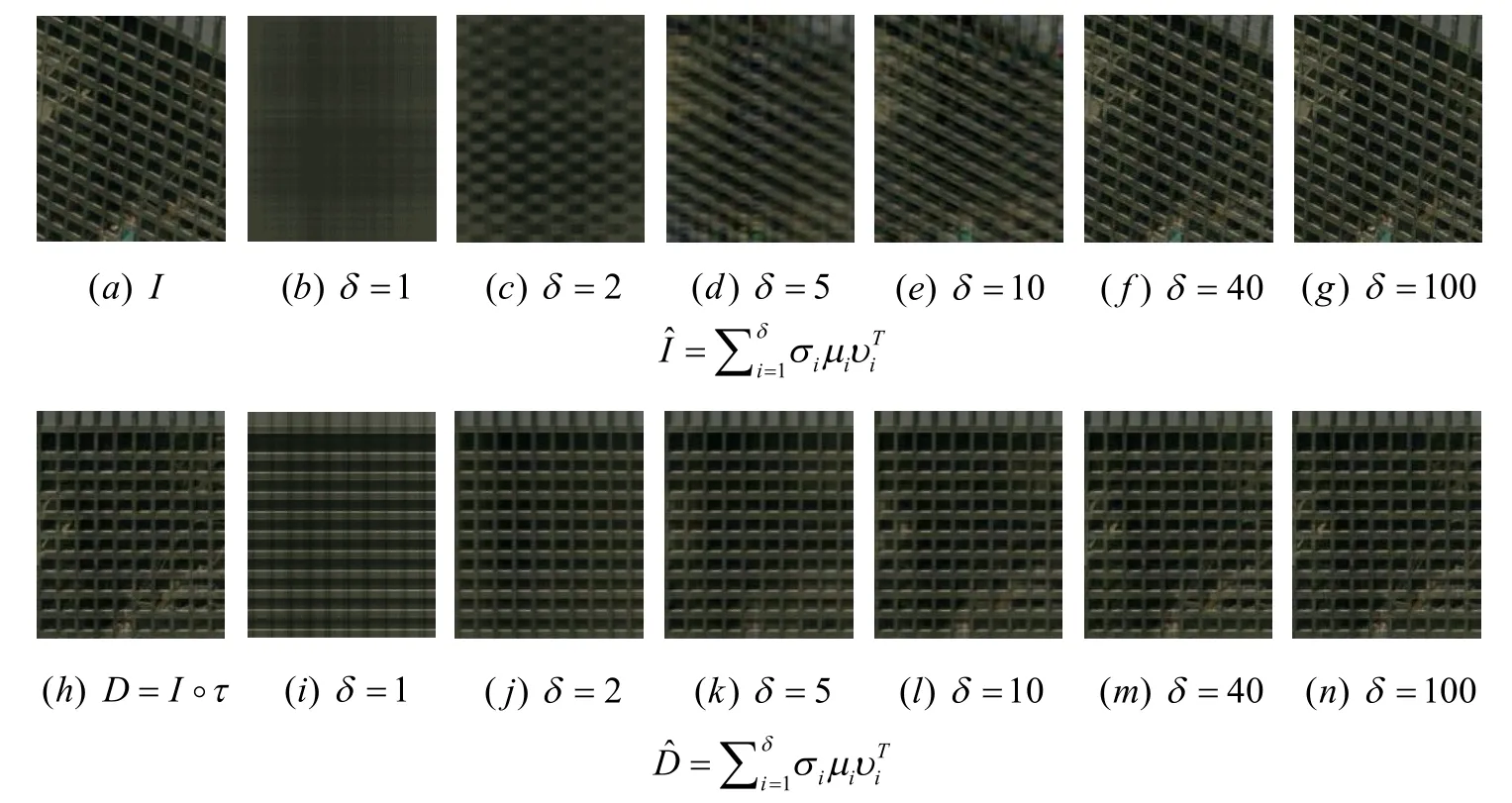
图1 SVD得到的近似解图像 (I,D∈R289×349)Fig 1 Image of Approximate Solution from SVD (I,D∈R289×349)
对比本文方法与非局部均值滤波方法的去噪能力,结果如图2所示.从图2可以看出,本文算法的去噪能力显然要比非局部均值滤波方法的要好.
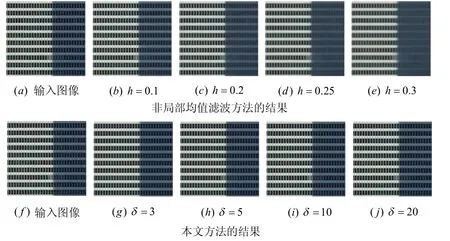
图2 本文方法与非局部均值方法去噪能力的对比Fig 2 Comparison of the De-noising Ability and the Non-local Means
3.2 图像整体上的结果
本文的秩压缩方法不仅对像建筑物表面这样有规则结构的图像适用,而且对像树和花这样的自然图像也适用.为了测试算法在整体图像上的效果,把图像切片以一定程度的重叠连在一起作为输入图像运行算法,然后对重叠部分取平均就得到了整体图像的去噪结果.去噪过程如图3.
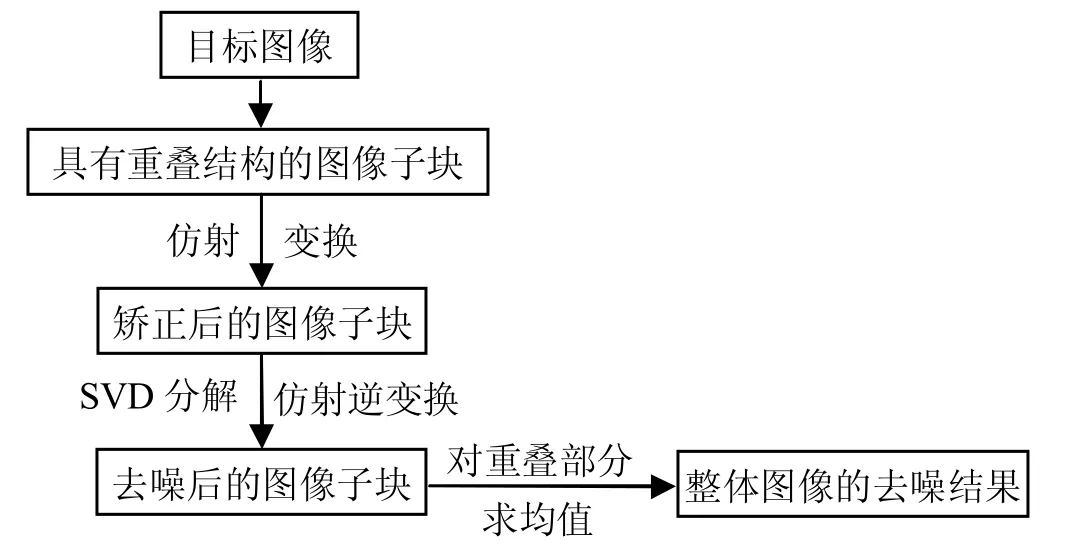
图3 去噪过程Fig 3 De-noising Process
按图3的去噪过程,对输入图像(大小为629 × 659),切成10 × 10的切片.首先用空间旋转变换将倾斜的切片矫正,然后对这些矫正过的低秩切片去噪,通过空间变换把去噪后的切片旋转成和原始图像一样的倾斜图像,对重叠部分取平均值,就得到输出的结果图像.
输入图像,大小分别为629 × 659和915 × 952,均切片,重叠部分大约为8个像素,以80 × 80的方格网运行算法,实验中所有的δ取值都是20.结果见图4和图5.
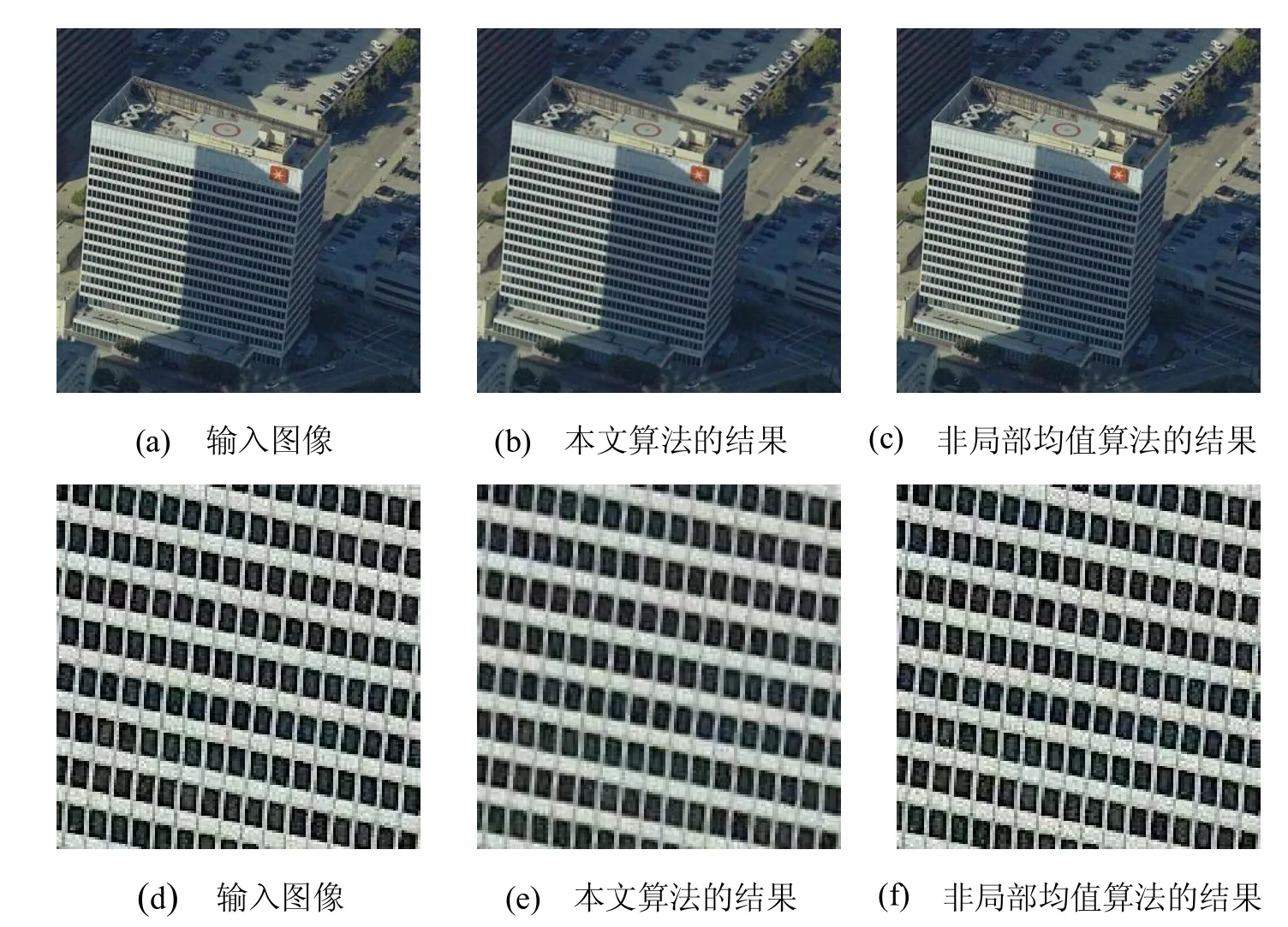
图4 不同算法对图像的去噪结果的比较 (629 × 659)Fig 4 Comparison of different algorithms for image and de-noising result (629 × 659)
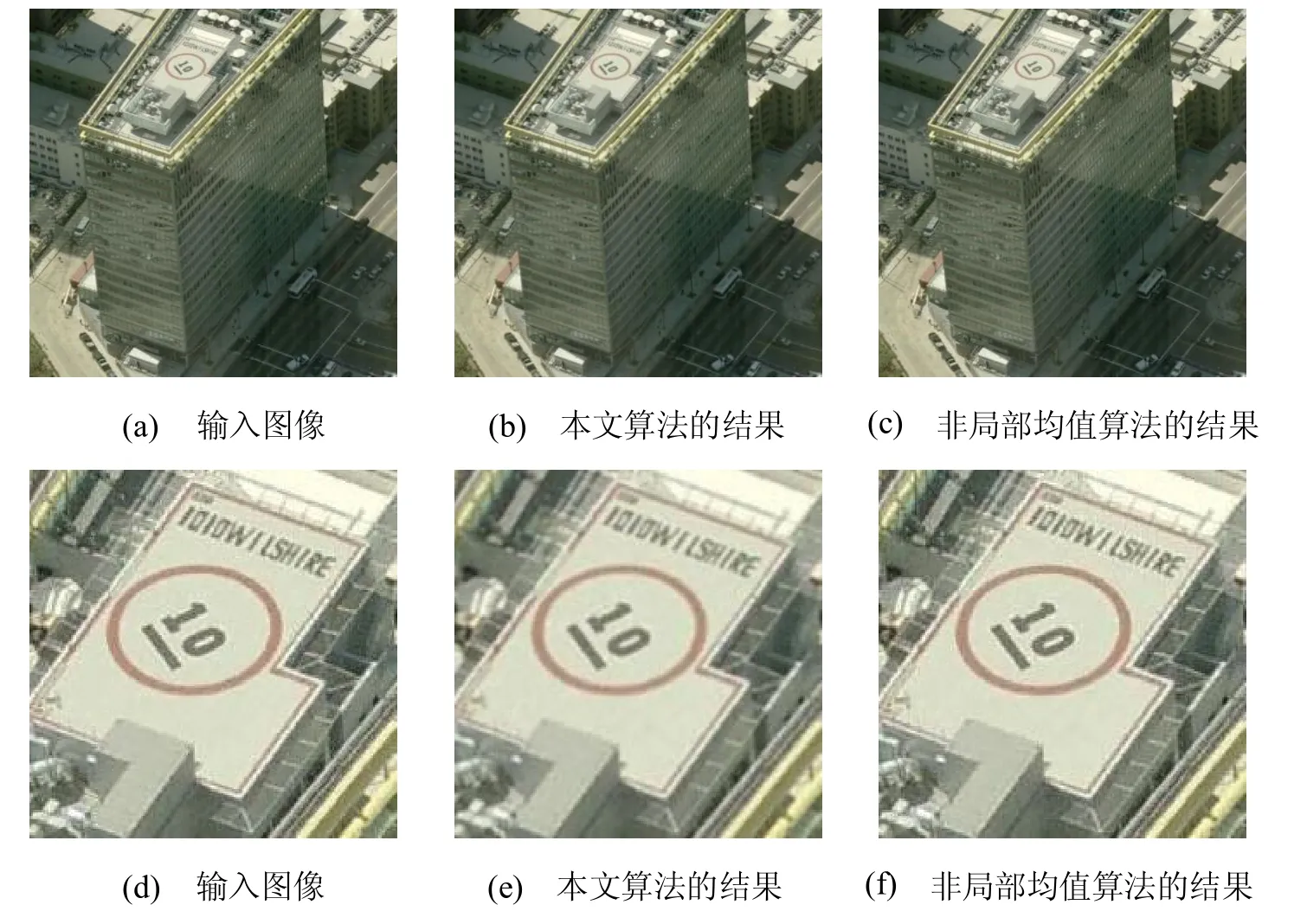
图5 不同算法对图像的去噪结果的比较 (915 × 952)Fig 5 Comparison of different algorithms for image and de-noising result (915 × 952)
对于δ取值的选择还需要进一步探究.大部分δ的取值都是在一定经验的基础上选择的,当然,还有其他的选取方法,例如利用鲁棒的RPCA方法得到输入图像切片的秩,把这个秩作为δ的取值等.
4 一些观察和讨论
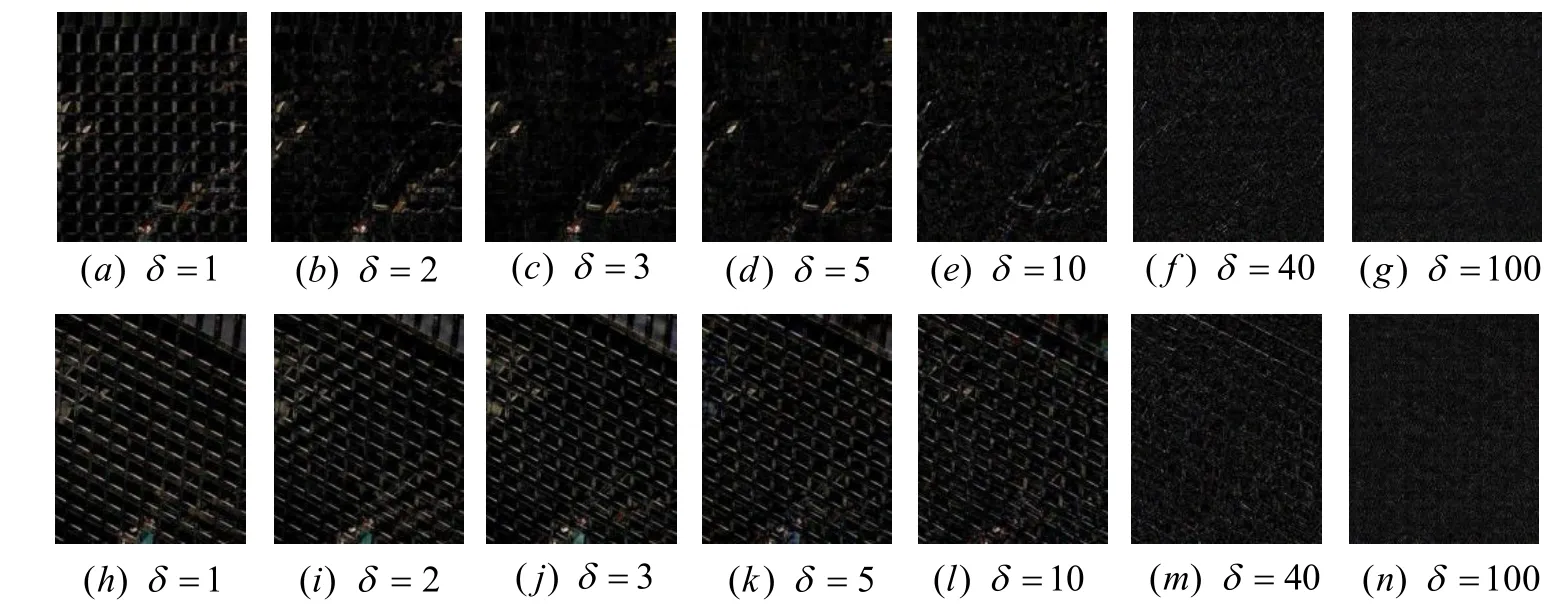
图6 SVD的残差Fig 6 Residual error of SVD
从图6可看出,即使对于没有矫正过的图像I,当取δ>40时,残差项都可以近似为高斯噪声.对于利用空间旋转变换矫正过的图像,只要取前两个奇异值时,残差就可以很快地收敛到高斯噪声,且逐个地增加了图像的不同的部分,因此本算法还可以用来处理图像的反射和遮挡问题.
5 结 论
本文所提出的基于图像潜在低秩结构去噪方法,首先将目标图像分成具有重叠结构的子块,然后通过仿射变换将图像子块分解成一个低秩矩阵加上一个稀疏矩阵,搜索与低秩矩阵相似的其它图像子块,从而得到一个数据矩阵,对数据矩阵的秩进行凸松弛:利用矩阵的核范数来近似代替矩阵的秩,并采用快速奇异值截断方法获得上述矩阵的低秩结构,最后对得到的低秩数据矩阵进行仿射逆变换,得到原图像子块去噪后的结果.对图像整体而言,对不同图像子块重叠区域求均值,从而得到整体图像的去噪结果.本算法有效地利用了图像子块内部的隐性低秩结构,使得非局部相似图像块的匹配更为准确,通过将其与图像子块间的低秩结构相融合,实现了信噪比更高的去噪效果.实验结果表明,相对于其它的经典图像去噪算法,本文算法鲁棒性更强,更有效,具有很好的应用前景.
我们还可以尝试进一步提高图像的质量,例如,利用超分辨率来矫正图像,甚至,还可以试着采用该算法来处理多个图像的反射或者遮挡问题.由于整个算法是基于低秩结构的,所以也将会导致图像被压缩.
[1] Kervrann C,Boulanger J. Optimal spatial adaptation for patch-based image denoising [J]. IEEE T Image Process,2006,15(10): 2866.
[2] Deledalle C A,Duval V,Salmon J. Non-local methods with shape-adaptive patches (NLM-SAP) [J]. J Math Imaging Vis,2012,43(2): 103-120.
[3] Dabov K,Foi A,Katkovnik V,et al. Image denoising by sparse 3-D transform-domain collaborative filtering [J]. IEEE T Image Process,2007,16(8): 2080-2095.
[4] Rajwade A,Rangarajan A,Banerjee A. Image denoising using the higher order singular value decomposition [J]. IEEE T Pattern Anal,2013,35(4): 849-862.
[5] Peng Y,Ganesh A,Wright J,et al. RASL: Robust alignment by sparse and low-rank decomposition for linearly correlated images [J]. IEEE T Pattern Anal,2012,34(11): 2233-2246.
[6] Candès E J,Li X,Ma Y,et al. Robust principal component analysis? [J]. J ACM,2011,58(3): 11.
[7] Chandrasekaran V,Sanghavi S,Parrilo P A,et al. Rank-sparsity incoherence for matrix decomposition [J]. SIAM J Optimiz,2011,21(2): 572-596.
[8] Zhang X Q. Hybrid singular value thresholding for tensor completion [EB/OL]. [2014-12-15]. https://www. engineeringvillage.com/search/quick.url?searchid=327927acMcb95M4282M8213M1155de4f3990&count=1.
[9] Zhang X Q. Simultaneous rectification and alignment via robust recovery of low-rank tensors [EB/OL]. [2013-11-10]. https://www.engineeringvillage.com/search/quick.url?searchid=c8d82221Me7ebM4e1fM9737M4b97efee95f0&coun t=1.
[10] Baker S,Matthews I. Lucas-kanade 20 years on: a unifying framework [J]. Int J Comput Vision,2004,56(3): 221-255.
The Study of Image De-noise Method Based on Potential Low-rank Texture
WU Ruiping,JIANG Hongxing,YE Xiuzi
(School of Mathematics and Information Science,Wenzhou University,Wenzhou,China 325035)
In A new image de-noising method is introduced in this paper,which is based on the potential low-rank texture. First step,the sub block of the original image is transformed to get its low-rank texture. Second step,the low-rank texture is compressed via SVD approach to obtain the final de-noising result. The result of experiment indicates that the result of such a de-noising method is clean and sharp. Furthermore,this method is even able to repair tiny stains of the input image. Compared with the non-local means algorithm,the proposed algorithm improves the de-noising performance as well as the preservation of feature information.
Image de-noising; Non-local Means; Low-rank Texture; Revolution; Convex Optimization
TP391.41
:A
:1674-3563(2017)02-0016-09
10.3875/j.issn.1674-3563.2017.02.003 本文的PDF文件可以从xuebao.wzu.edu.cn获得
(编辑:王一芳)
2016-04-21
浙江省自然科学基金(LY16F020023;LY12F03016)
吴瑞平(1988-),男,江西余江人,硕士研究生,研究方向:智能系统与控制