基于安全及运营需求的城市轨道交通制动系统模式研究
2017-03-27武青海
武青海
(中国铁道科学研究院机车车辆研究所,100081,北京∥副研究员)
基于安全及运营需求的城市轨道交通制动系统模式研究
武青海
(中国铁道科学研究院机车车辆研究所,100081,北京∥副研究员)
从城市轨道交通制动系统设计原则出发,分别介绍了车控制动系统和架控制动系统的技术特点。分析制动系统故障类别不同对不同编组列车运营造成的影响,并给出相应的限速建议和制动系统控制策略。从技术层面给出了选用制动系统模式的合理化建议:4节及以上编组列车可任意采用车控制动系统或架控制动系统,3节及以下编组列车优先选用架控制动系统。
车控制动系统; 架控制动系统; 车辆编组
制动系统作为城市轨道交通车辆的一个重要子系统,需满足停车频繁及精确停车等要求。其性能的好坏对车辆的安全运营具有重要影响。目前国内主要采用车控制动系统和架控制动系统[1-2]。两者均采用直通电空制动技术[3-4]。本文从故障导向安全的设计原则出发来分析两种城市轨道交通车辆制动模式的特点,以及故障情况下两种制动模式对运营的影响,并给出相应地合理化建议。
1 制动系统设计原则和功能要求
1.1 制动系统设计原则
制动系统按照“故障导向安全”的原则进行设计。当在列车牵引运行或惰行时,制动系统“故障导向安全”的原则是要避免产生不期望的制动力,以使列车能够维持运行;当列车制动停车时,制动系统“故障导向安全”的原则是要保证有足够的制动力,确保列车能够安全停车。
保证故障导向安全的措施为:
•采用常时带电方式的独立紧急制动安全环路,一旦失电,列车自动实施紧急制动,即紧急制动为“失电制动”;
•采用“失电缓解”的常用制动控制模式,当电子制动控制单元失电时,常用制动处于缓解状态;
•采用有安全状态的监控制动控制器;
•采用有安全状态的监控防滑控制器;
•制动不足检测;
•不缓解检测和强迫缓解;
•确保安全的部件冗余和故障功能降级措施。
制动系统故障从影响列车安全和影响列车运营的角度可划分为以下3类:
•I类(严重故障):需要清客,在紧急牵引模式下回库或等待救援;
•II类(中等故障):只能运行到终点站,回库后检查;
•III类(次要故障):当日运营结束后回库检查。
根据上述故障分类,制动系统主要故障如表1所示。
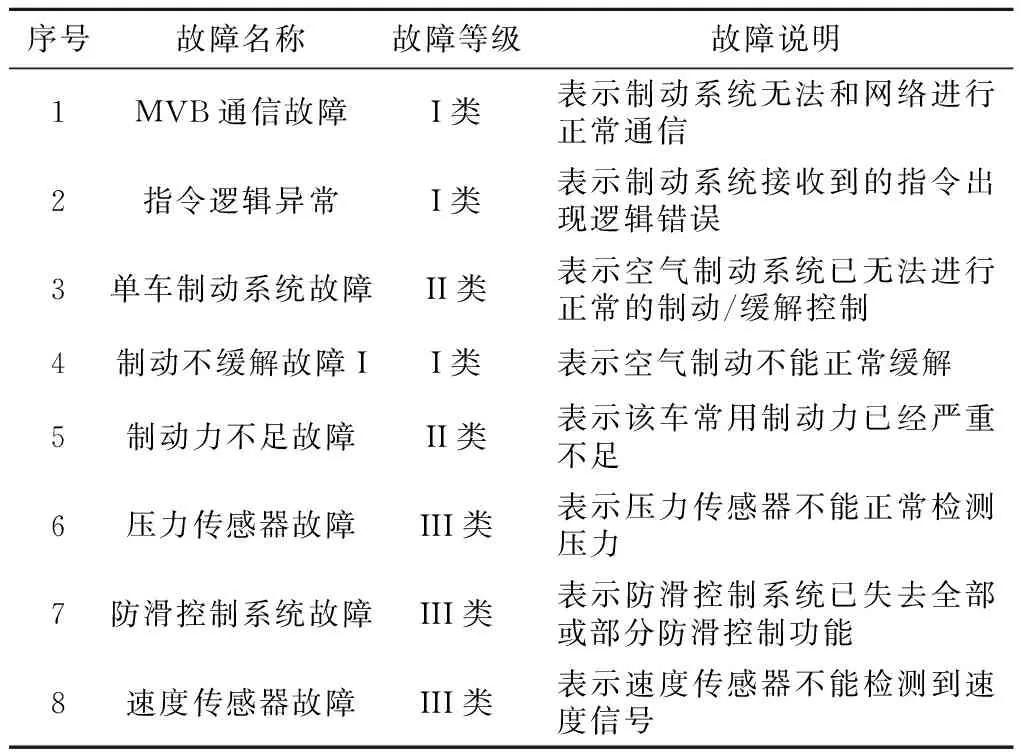
表1 制动系统主要故障
1.2 制动系统功能
制动系统应具有常用制动、紧急制动、防滑控制及冲动限制等功能。常用制动为调节列车运行速度或使列车在预定地点停车的制动,采用空电混合制动方式。紧急制动为由列车紧急安全环路失电控制紧急制动阀实施的制动,采用纯空气制动方式。防滑控制,即当车轮发生滑行时,为满足实际轮轨的制动粘着条件,通过控制防滑控制阀的动作减少制动力,并按减速度和速度差等判据来调整制动力。冲动限制,即制动过程中对制动减速度的变化率进行控制,以满足旅客舒适度的要求。
目前国内城市轨道交通车辆车控制动系统和架控制动系统技术已经非常成熟,两者均能满足上述制动系统功能要求。
2 车控制动和架控制动系统的技术特性
以北京纵横机电技术开发公司研制的车控制动系统EP08和架控制动系统EP09为例来简要介绍车控制动系统和架控制动系统技术特性。
2.1 车控制动系统技术特性
假设列车为6节编组,则车控制动系统是以每节车辆为单位来设置制动控制单元(BCU)的制动由司机控制器或ATO(列车自动运行)信号系统发出的制动控制指令,通过MVB(多功能车辆总线)传送到每节车辆的BCU。然后,BCU通过制动指令和电制动信息来计算本车所需制动力以及应施加的空气制动力。制动指令也通过贯穿全列的硬线来传送,从而形成对指令网络传送的冗余,以提高系统的可靠性。常用制动指令一般通过MVB传送,而紧急制动指令通过列车硬线传递。网络控制模式下优先采用电制动。只有当电制动不能满足制动力要求时,才需要补充空气制动。在紧急牵引模式下没有电制动,BCU会根据本车的载重和列车硬线指令来控制本车的空气制动。
控制方式,即每节车辆均配置有1个独立的BCU(如图1中所示的EP08),用于控制本车的制动力。图1为车控制动系统拓扑结构示意图。

图1 车控制动系统拓扑结构图
紧急制动为纯空气制动,由贯通全列的紧急安全环路来控制。一旦环路线失电,就产生紧急制动作用。紧急制动也可由按压紧急制动按钮或由ATP(列车自动防护)系统来自动实施。紧急制动发生后,在列车完全停止前不允许缓解制动。
常用制动采用空电混合制动方式,电制动与空气制动实时配合、电制动优先、空气制动延时投入。当电制动不足时,才由空气制动进行补充。
2.2 架控制动系统技术特性
架控制动系统是以每个转向架为单位来设置制动控制单元的制动控制方式。和传统的车控制动方式相比,架控制动系统是一种分散式的控制方式[5]。同样假设列车为6节编组,则图2为架控制动系统拓扑结构示意图。

图2 架控制动系统拓扑结构图
架控制动系统采用基于CAN(控制器局域网络)总线的分布式控制方案。每个转向架都有1个独立的BCU以控制本转向架的制动力。每辆车有2套BCU。架控制动系统将6套BCU(3节车辆)作为1个控制网段,同一个控制网段上的BCU可以通过制动系统CAN总线进行通信。图2中的6节编组列车有2个控制网段。
在每个网段上的2个制动控制单元(EP09G)具有网关的功能,为制动网关单元。只有本转向架制动控制功能而没有网关功能的BCU(EP09S)为本地制动控制单元或智能制动控制单元。EP09G同时具有与MVB和列车控制线的通信接口。EP09G通过MVB和列车硬线接收制动指令和电制动信息,并计算出本单元中各个转向架上应施加的空气制动力,然后通过制动系统CAN总线传送给本网段上的各转向架的EP09S。通常情况下,1个单元内的EP09G只有1个工作在网关模式;而另1个作为备用网关,只进行本地控制,相当于EP09S。
架控制动系统的紧急制动为纯空气制动,由贯通全列的紧急安全环路来控制。一旦环路线失电就会产生紧急制动作用。紧急制动发生后,在列车完全停止前不允许缓解制动。
2.3 空气制动的实施原则
无论是车控制动系统还是架控制动系统,常用制动时均优先采用电制动,当电制动不足时补充空气制动。常用制动时实施空气制动可采用“等黏着”原则或者“等磨耗”原则[6]。
2.3.1 “等黏着”原则
(1) 当各M车(动车)电制动正常发挥时,电制动力总和等于本列列车所需要的制动力总和。此时,Tc车(拖车)及动车均不补充空气制动力。
(2) 当M2车和M3车电制动力下降时,电制动力总和不能满足本列列车总制动力需求,但能够满足4辆动车所需的制动力。此时,所需要补充的空气制动力仅由拖车补充,而动车均不补充空气制动力。
(3) 当M1车、M2车、M3车和M4车电制动力均下降时,电制动力总和不能满足本列列车总制动力需求。此时,每辆拖车只补充自身所需要的空气制动力,每辆动车也仅补充自身所需要的空气制动力。
2.3.2 “等磨耗”原则
(1) 当各M车电制动正常发挥时,电制动力总和等于本列车所需要的制动力总和,拖车及动车均不补充空气制动力。
(2) 当M2、M3和M4车电制动力下降时,电制动力总和不能满足本列车总制动力需求,则所需补充的空气制动力在各车辆间平均分配。
(3) 当M2、M3和M4车电制动力继续下降时,所需补充的空气制动力由各车辆平均承担。此时,如M1车电制动力和空气制动力之和超出本车黏着极限,则M1车按照黏着极限补充空气制动力,其余所需空气制动力由其它5节车辆平均承担。
3 制动系统故障对城市轨道交通运营影响分析
对于制动系统来说,产生故障的级别有系统级别故障、单元级别故障和部件级别故障3种。本文假定列车最大设计常用减速度为1.0 m/s2、设计紧急制动减速度为1.2 m/s2,并进行分析。
3.1 系统级别故障
当整列列车发生制动系统故障(如整车MVB通信故障或制动指令逻辑异常)时,无论是车控制动系统还是架控制动系统,均会将故障安全导向到紧急制动状态,待安全停车后等待救援或在紧急牵引模式下限速运行回库。此类故障均属于运营中的第I类严重故障。
3.2 单元级别故障
3.2.1 车控制动系统
3.2.1.1 列车为6节及以上车辆编组
一旦发生单节车辆紧急制动故障,则列车将丧失1/6以下的空气制动能力,从而造成列车紧急制动减速度的降低和制动距离的延长。以6节编组列车为例,设计速度为100 km/h的列车发生单车辆紧急制动故障时,紧急制动减速度由1.2 m/s2降至1.0 m/s2左右,紧急制动距离延长70 m左右。设计速度为80 km/h的6节编组列车发生单节车辆紧急制动故障时,其紧急制动距离延长40 m左右。为保证安全运营,紧急制动距离必须满足设计要求,故需采取限速运行的措施。根据紧急制动距离及摩擦副热容量能力,出现此类故障时,建议将设计速度为100 km/h的列车运行速度降低到80 km/h,将设计速度为80 km/h的列车运行速度降低到60 km/h;待故障列车限速运行到终点后退出运营。这样可将对正线运营的影响降至最低。此类故障可以归属于第II类中等故障。
假设如采用“等磨耗”原则,列车制动初速度v0为100 km/h,紧急制动减速度a0为1.2 m/s2。
则当列车制动无故障时
F总=Ma
式中:
F总——6节编组列车总制动力;
M——6节编组列车总质量;
a——列车制动减速度;
v0——列车制动初速度;
S——列车紧急制动距离,代入上述数值,可得S=321.5 m。
当发生单节车辆紧急制动故障,丧失1节车辆制动力时,列车总制动力为:
F1=5/6×F总
此时,制动减速度:
a1=F1/M=1.0 m/s2
相应的紧急制动距离为:
遵循“故障导向安全”原则,在丧失1节车辆制动力后,应保证最小紧急制动距离Smin为321.5 m,则相应的制动初速度应限制为:
由于列车处于故障模式,因此应保证有足够的安全裕量(安全裕量一般不小于20%)。本文建议限速为80 km/h。
当发生单节车辆常用制动故障时,如果制动系统采用“等黏着”策略,则在常用制动减速度为0.8 m/s2及以下(目前城市轨道交通车辆制动普遍为无级控制,最大常用制动减速度为1.0 m/s2)时,丧失的空气制动力可通过提高制动级别指令进行补偿。如果制动系统采用“等磨耗”策略,则在常用制动减速度为0.8 m/s2及以下时,丧失的空气制动力将自动由其它车辆补偿。对于目前国内城市轨道交通车辆常规运营来说,进站时列车速度为50 km/h左右,制动减速度一般不高于0.8 m/s2。因此,即使发生单节车辆常用制动故障,也基本可以保证列车正常运营到终点后再退出运营。因此,此类故障归属于第II类中等故障。
3.2.1.2 列车为4节车辆编组
当发生单节车辆紧急制动故障时,4节编组列车将丧失1/4的空气制动能力。设计速度为100 km/h的列车紧急制动减速度由1.2 m/s2降低至0.9 m/s2左右,紧急制动距离延长110 m左右;设计速度为80 km/h的列车紧急制动距离延长70 m左右。经计算可得,建议将设计速度为100 km/h的列车运行速度降低到65 km/h;建议将设计速度为80 km/h的列车运行速度降低到50 km/h。出现此类故障时,建议列车限速运行到终点再退出运营。此故障属于第II类中等故障。
当发生单节车辆常用制动故障时,无论制动系统采用的是“等黏着”原则还是“等磨耗”原则,都将影响到列车的正常运营。建议故障列车限速运行到终点再回库检查。这样可将对运营的影响降低到最小。建议将设计速度为100 km/h的列车运行速度降低到75 km/h;将设计速度为80 km/h的列车运行速度降低到60 km/h。此类故障可归属于第II类中等故障。
3.2.1.3 列车为3节车辆编组
当发生单节车辆紧急制动故障时,由于整车的制动热容量能力大大降低,严重影响了列车的安全性能;因此,建议故障列车降速运行到最近一站后清客,然后回库检查。可见,此类故障应属于第I类严重故障。
当发生单节车辆常用制动故障时,建议将设计速度为100 km/h的列车运行速度降低到60 km/h;建议将设计时速80 km/h的列车运行速度降低到40 km/h。待故障列车降速运行到终点后再退出运营。此类故障属于第II类中等故障。
3.2.2 架控制动系统
3.2.2.1 列车为4节或以上车辆编组
当发生单架紧急制动故障时,列车将丧失1/8的空气制动能力。以4辆编组列车为例,设计速度为100 km/h的列车紧急制动减速度由1.20 m/s2降至1.05 m/s2左右,紧急制动距离延长50 m左右;设计速度为80 km/h的列车紧急制动距离延长30 m左右。建议将设计速度为100 km/h的列车运行速度降低到90 km/h,将设计速度为80 km/h的列车速度降低到70 km/h。出现此类故障时,建议故障列车限速运行到终点,再退出运营。此类故障可属于第II类中等故障。
当发生单架常用制动故障时,如果制动系统采用“等黏着”原则,则在常用制动减速度为0.9 m/s2及以下时,丧失的空气制动力可通过提高制动级别指令进行补偿。如果制动系统采用“等磨耗”原则,则丧失的空气制动力将自动由其它车辆补偿,并能保证故障列车正常运营到终点后再退出运营。此类故障可属于第II类中等故障。
3.2.2.2 列车为3节车辆编组
当发生单架紧急制动故障时,列车将丧失1/6以下的空气制动能力。设计速度为100 km/h的列车紧急制动减速度由1.2 m/s2降至1.08 m/s2左右,紧急制动距离延长70 m左右;设计速度为80 km/h的列车紧急制动距离延长40 m左右。建议将设计速度为100 km/h列车的运行速度降低到80 km/h;将设计速度为80 km/h的列车运行速度降低到60 km/h。出现此类故障时,建议故障列车限速运行到终点后再退出运营。此类故障属于第II类中等故障。
当发生单架常用制动故障时,如果制动系统采用“等黏着”原则,则在常用制动减速度为0.8 m/s2及以下时,丧失的空气制动力可通过提高制动级别指令进行补偿。如果制动系统采用“等磨耗”原则,则在常用制动减速度为0.8 m/s2及以下时,丧失的空气制动力自动由其它车辆补偿。这样基本可以保证故障列车正常运营到终点后再退出运营。此类故障可属于第II类中等故障。
3.3 部件级别故障
无论是车控制动系统还是架控制动系统,在“故障导向安全”的设计理念下,均对涉及到安全的部件进行了冗余或故障功能降级设计。如当常用预控压力传感器发生故障时,可通过制动缸压力传感器来反馈制动指令执行的正确性。当某轴速度传感器故障时,可采用相邻速度传感器信号来补偿该轴速度传感器信号;当某节车辆防滑控制系统发生故障时,虽该车的防滑功能失效,但不影响该节车辆制动力的输出,也能保证列车的安全。
因此,在出现部件级别故障时,列车可以在结束当天的正常运营后再进行检查。此类故障归属于第III类次要故障。
4 结论
目前,在国内城市轨道交通车辆上使用的车控制动系统和架控制动系统技术已经非常成熟。通过从技术角度分析制动系统故障对城市轨道交通运营的影响,得出如下结论:
(1) 对于城市轨道交通车辆运营来说,6节或以上编组列车的车控制动系统和架控制动系统基本没有差别,均能满足使用要求。
(2) 4节编组列车的架控制动系统比车控制动系统更具优势。但是,车控制动系统如果在发生故障时采取合理控制策略及降级运行的措施,也可以同样满足城市轨道交通车辆运营的需求。
(3) 3节及以下编组列车的架控制动系统比车控制动系统优势更明显,因而建议采用架控制动系统。
城市轨道交通列车制动系统方案是选用车控制动系统或是架控制动系统,除了从技术方面考虑,还需考虑车辆的一次性采购成本及后期的维护和维修成本。应经过综合论证后再适当选取合适的制动模式为宜[7-8]。
[1] 韩晓辉,林祜亭,樊贵新,等.城轨车辆车控制动控制方式与架控制动控制方式[J].铁道机车车辆,2010,30(5):53.
[2] 皮晓龙.地铁制动系统控制方案分析[J].价值工程,2015(19):222.
[3] 林祜亭,李和平.城轨列车微机控制模拟直通制动系统[J].现代城市轨道交通,2005(2):2.
[4] 杨丰萍,陈振华,李玉庆.地铁微机控制直通电空制动系统研究[J].华东交通大学学报,2014,31(3):55.
[5] 王群伟,林祜亭,王新海,等.架控制动系统及其在城轨车辆上的应用[J].铁道机车车辆,2011,30(2):31.
[6] 刘卓.地铁车辆制动系统空气制动施加方式及特点分析[J].铁道机车车辆,2011,31(6):66.
[7] 覃海春.车辆制动控制系统选型分析[J].中国科技博览,2015(35):391.
[8] 吕晓晖.我国城轨车辆制动系统介绍及选型[J].城市轨道交通研究,2009,12(6):56.
Urban Rail Brake System Mode Based on Safety and Operation Requirements
WU Qinghai
Based on the design principles of urban rail brake system, the technical characteristics of vehicle brake system and bogie brake system modes applied on urban rail vehicles are introduced. The effects of different malfunctions happened in brake system on urban rail vehicle operation are analyzed, corresponding measures like speed limitation and control strategy of the brake system are proposed. Rational technical suggestions are put forward for the selection of brake system: a four or more vehicles marshalling train could adopt both vehicle and bogie brake systems; a three or less vehicles marshalling train is recommended to adopt the bogie brake system.
vehicle brake system; bogie brake system; vehicle marshalling
Locomotive & Car Research Institue,China Academy of Railway Sciences,100081,Beijing,China
U 270.35
10.16037/j.1007-869x.2017.03.011
2016-05-19)
