无人机着舰纵向广义轨迹优化设计
2017-02-15刘宪飞王勇张代兵
刘宪飞, 王勇, 张代兵
(1.北京航空航天大学 自动化科学与电气工程学院, 北京 100191;2.国防科学技术大学 机电工程与自动化学院, 湖南 长沙 410073)
无人机着舰纵向广义轨迹优化设计
刘宪飞1, 王勇1, 张代兵2
(1.北京航空航天大学 自动化科学与电气工程学院, 北京 100191;2.国防科学技术大学 机电工程与自动化学院, 湖南 长沙 410073)
针对复杂气流干扰对无人机着舰的影响,对无人机着舰的纵向下滑轨迹进行研究。首先,针对常规控制结构的不足,提出一种基于直接力控制的无人机着舰纵向控制策略,进而引出无人机广义轨迹概念;然后,考虑各种约束条件,将无人机纵向广义轨迹设计转化为约束非线性规划问题,求解得到不同海面自然风速下的纵向广义轨迹,以及该广义轨迹与海面自然风速的函数关系。算例优化设计结果满足各种约束条件和优化目标,可以保证无人机在不同海面自然风速下都具有更大的扰流抑制能力。
广义下滑轨迹; 直接力控制; 海面自然风; 操纵余量
0 引言
无人机着舰是整个飞行过程的最后阶段,同时也是安全事故频发的阶段。无人机着舰的环境非常复杂:无人机要降落在长度有限且运动的甲板上[1],同时还受到着舰空间复杂气流的干扰,包括海面自然风干扰和舰尾扰流干扰[2]。在复杂的着舰环境中实现安全着舰与对无人机的精确引导密不可分,而对无人机的精确引导离不开精确的着舰下滑轨迹。因此,对着舰下滑轨迹的研究是十分必要的。
常规的下滑轨迹设计[3-5]将下滑轨迹角设定为固定值(如-3.5°),未考虑海面自然风对下滑轨迹角的影响,同时还忽略了无人机沿该轨迹下滑时舵面是否具有充分的操纵余量和最大的操纵效率。事实上,在设计下滑轨迹时,海面自然风和无人机的飞行状态都是不可忽略的重要因素。首先,海面存在着速度易变的自然风[6],如果无人机以固定下滑角下滑,则自然风风速的变化会严重影响无人机的着舰精度[3];其次,舰船尾部存在着复杂的舰尾扰流,无人机只有具备了充分的操纵余量和最大的操纵效率,才能抵抗复杂干扰。
本文重点研究无人机着舰纵向广义轨迹的优化设计。由于该广义轨迹与具体的控制策略密不可分,故首先针对常规控制策略[7-8]的不足,提出一种基于直接力控制(Direct Force Control, DFC)的无人机着舰纵向控制策略,并引出纵向广义轨迹的概念,然后重点对纵向广义轨迹的优化设计进行研究。
1 基于DFC的无人机着舰纵向控制
策略
常规的控制策略是通过升降舵调节俯仰而间接改变升力来控制高度,同时通过调节油门改变推力来控制空速或迎角进行动力补偿。事实上,该控制策略存在着抗干扰能力不足的问题:由于无人机俯仰转动惯量较大,通过升降舵调节俯仰间接改变升力的过程较慢,因此升降舵控制高度的过程具有较大的滞后;无人机质量较大,通过改变推力进行动力补偿具有延迟性,而从发动机改变油门到推力变化也需要一定时间。因此,该控制策略限制了无人机抑制舰尾流扰动和甲板运动扰动的能力。
DFC可通过偏转相关控制面直接改变气动力,在控制策略中引入DFC可实现对无人机的快速控制。为此,本文提出基于DFC的无人机着舰纵向控制策略,控制结构如图1所示。
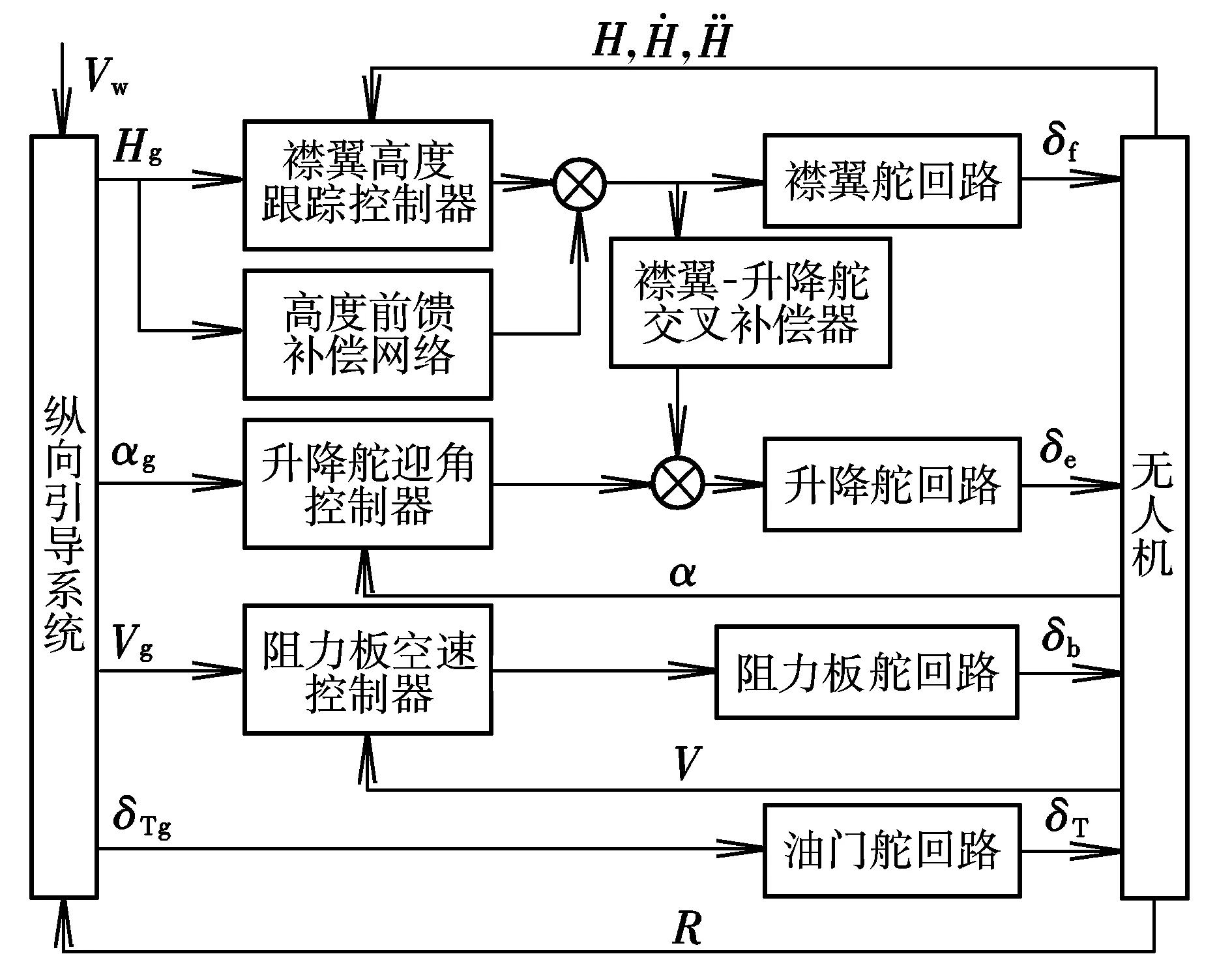
图1 基于DFC的无人机着舰纵向控制结构Fig.1 Structure of longitudinal control for UAV carrier landing based on DFC
图中,纵向控制结构有4个通道,分别为襟翼高度控制通道、升降舵迎角控制通道、阻力板空速控制通道、基准油门设定通道。其中,襟翼高度控制通道的高度前馈补偿网络用于补偿甲板运动,使高度跟踪控制更为快速。襟翼-升降舵交叉补偿器为升降舵迎角控制通道引入襟翼高度控制通道的补偿信号,以消除襟翼偏转对迎角的影响。R为无人机距理想着舰点的水平距离;Vw为海面自然风风速。纵向引导系统依据R和Vw生成着舰引导指令,即理想下滑轨迹高度指令Hg、基准迎角指令αg、基准空速指令Vg和基准油门指令δTg。以上引导指令构成无人机着舰纵向广义轨迹。广义轨迹是下滑轨迹的广义化,它提供了从开始着舰到引入甲板运动补偿之前的一段时间内,无人机无扰动下滑状态下的飞行状态信息和所要跟踪的下滑轨迹的信息。
升降舵控制无人机的迎角处于基准迎角;襟翼控制无人机高度,消除高度偏差;油门处于基准油门处,阻力板控制无人机空速处于基准空速。同时本策略要求平衡状态下的无人机各操纵面具有合适的双向操纵余量和最大的操纵效率,以确保无人机具有最大的抗干扰潜力。迎角处于基准迎角,可以保证基准升力;襟翼偏转产生直接升力可快速调节无人机高度;阻力板偏转直接改变阻力,对空速实现快速调节;基准油门处于较大油门状态。无人机不能安全着舰时,可快速将阻力板收回,同时增大油门,在较大推力下快速复飞。
2 无人机着舰纵向广义轨迹优化设计
2.1 无人机着舰纵向广义轨迹优化方案
为了方便讨论,现提出以下假设:
(1)不考虑航母甲板六自由度运动;
(2)海面上存在着大小和方向均可测的海面自然风,取海面自然风为水平逆风;
(3)在着舰过程中,航母地速大小和方向均保持不变,取着舰甲板中心线方向为航母地速方向;
(4)将无人机着舰看作质点运动。
在固定的自然风速和航母地速下,无人机着舰下滑的基准飞行是等下滑角的直线运动,以无平飘的硬着舰方式着舰[9]。将下滑轨迹设定为端点位于理想着舰点的射线,该射线位于包含着舰甲板纵向中心线的铅垂平面内,与水平面呈一定角度射向着舰下滑窗口方向。当着舰过程中的自然风风速变化时,该角度将随之变化。
广义轨迹既包含下滑轨迹信息,又规定了无人机的飞行状态,可将纵向广义轨迹的设计转化为一个约束非线性规划问题。为此,需分析无人机着舰的各种相关约束条件,确定优化目标为无人机沿轨迹下滑具有充分的操纵余量和最大的操纵效率,并采用现代优化算法[10-11]对该问题进行优化求解。
离线设计出不同自然风速下的无人机最优广义轨迹,通过曲线拟合获得最优广义轨迹与自然风速的函数关系式,并存储到飞控计算机中。着舰过程中,航母上相关传感器测得实时海面自然风速,并通过数据链路发送到飞控计算机。飞控计算机根据最优广义轨迹与自然风的函数关系式得出对应的最优广义轨迹,并控制无人机跟踪该轨迹。该方案使无人机在不同的自然风速下着舰时,始终能保证自身具有充分的双向操纵余量和最大的操纵效率。
2.2 无人机着舰下滑轨迹几何约束
无人机着舰纵向下滑轨迹如图2所示。
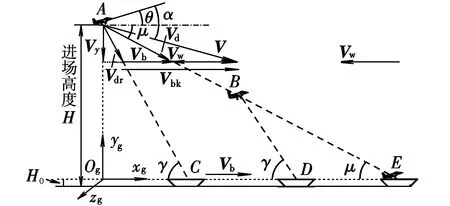
图2 舰载无人机纵向下滑轨迹Fig.2 Longitudinal glide trajectory of carrier UAV
图中:坐标系Ogxgygzg为地面坐标系,Og为无人机着舰初始时刻重心在甲板所在水平面上的投影,Ogxg沿舰船甲板中心线与母舰运动方向同向,Ogyg位于包含Ogxg的铅垂面内垂直Ogxg向上,Ogzg由右手定则确定;H为无人机开始着舰时的初始高度;H0为海面平静状态下航母甲板距离海平面的高度;V为无人机空速矢量;α为无人机迎角;Vbk为舰船空速矢量(Vbk=Vb-Vw),矢量的方向均为水平方向;Vb为航空母舰地速矢量;Vw为自然风风速矢量;Vdr为无人机对航母的相对速度矢量,平行于AC(BD)方向,与水平面夹角为相对下滑轨迹角γ,射线CA或DB是无人机的相对下滑轨迹;Vd为无人机地速矢量,沿AE方向与水平面夹角为无人机航迹角μ;Vy为无人机的下沉速度矢量,方向垂直向下。
初始时刻无人机位于A点,母舰位于C点;第二时刻无人机位于B点,航母位于D点;最后时刻,无人机在E点着舰。在地面坐标系中,无人机沿着ABE以角μ下滑;而在舰船体系中,无人机沿着AC(BD)线以角γ下滑。
根据图2所描述的各速度矢量之间的关系,可得到以下关系式:
式中:矢量Vw,Vb,V,Vd均在地面坐标系中;标量Vw,Vb,V,Vd为对应速度矢量的模,均为非负数。由上式矢量对应项相等得:
进一步得:
(1)
无人机对航母的相对速度Vdr为:
(2)
又Vdsinμ=Vdrsinγ⟹Vdμ≈Vdrγ,故得相对下滑轨迹角表达式为:
(3)
由式(3)可知,在考虑海面自然风的情况下,相对下滑轨迹角γ是Vw,V,α和θ的函数。
2.3 无人机着舰过程力学约束
着舰过程中,基准运动下的无人机处于平衡状态,其受力情况如图3所示。
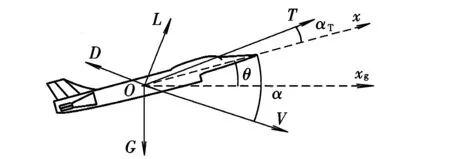
图3 舰载无人机的受力分析Fig.3 The force conditions of carrier UAV
图中:Ox属于无人机机体轴系;G为无人机的重力;T为发动机推力;L为升力;D为阻力;αT为发动机推力偏置角。将各力投影到机体轴,并考虑无人机俯仰力矩平衡,可得:
(4)
2.4 无人机着舰对运动和操纵参数的约束
运动和操纵参数包括相对下滑轨迹角γ、无人机空速V、迎角α、俯仰角θ、油门量δT、升降舵偏量δe、襟翼偏量δf、阻力板偏量δb。这些参数为待优化参数,纵向广义轨迹是根据γ,V,α和δT的优化结果构建的。
(1)相对下滑轨迹角γ。γmax的确定应考虑飞机的下沉率和结构载荷的限制。γ过大,意味着冲击载荷越大,对无人机机体和起落架不利。γ的最小角度γmin的确定要考虑以下因素:
①理想着舰点位置和净空安全高度。在实际着舰中为保证舰载无人机和航空母舰的安全,要求舰载无人机飞越航空母舰舰尾时,无人机与甲板之间有10 ft(3 m)左右的净空安全高度,理想着舰点位置和净空安全高度共同决定了γmin。
②着舰点误差散布。γ越小,飞机偏离下滑轨迹而造成的着舰点误差散布就越大[6]。通过上述条件确定γ的范围为γmin≤γ≤γmax。
(2)空速V。V的范围受以下3个因素影响:
①飞机包线。保证无人机工作在飞行包线内。
②下沉速度。确定V还要考虑着舰过程对下沉速度的约束,过大的下沉速度对起落架不利。
③机-舰相对速度Vdr约束。保证水平方向上无人机的地速要大于航空母舰地速;同时在垂直方向上,保证飞机向下运动。由式(2)得:
由此可以推出条件V>Vw+Vb和α-θ>0,可确定V的范围为Vmin≤V≤Vmax。
(3)迎角α。α要大于规定迎角αmin,小于失速迎角αmax。因此,α的范围为αmin≤α≤αmax。
(4)俯仰角θ。θ应处于规定范围内,要保证无人机主轮先着舰并避免蹭尾。θ的范围为θmin≤θ≤θmax。
(5)油门量δT。确定油门量要在发动机的工作包线内;油门量应保持较大状态,为复飞逃逸做准备。因此δT的范围为δTmin≤δT≤δTmax。
(6)升降舵偏量δe、襟翼偏量δf、阻力板偏量δb。三者均应在最大偏量范围内,分别为δemin≤δe≤δemax,δfmin≤δf≤δfmax,δbmin≤δb≤δbmax。
通过以上分析可知,这些参数之间相互制约,相互影响,在设计广义轨迹时需要进行综合考虑。
2.5 广义轨迹优化设计问题的构建
待优化参数向量为:
为使无人机沿轨迹下滑具有合适的操纵余量和最大的操纵效率,确定其优化目标函数为:
(5)
式中:Cmδe为升降舵俯仰力矩系数舵效;CLδf为襟翼升力系数舵效;δb为阻力板偏角;δbm为阻力板阻力中值偏角(阻力板半阻力状态所对应的偏转角);k1,k2,k3为加权系数。
求目标函数的最小值也就是使Cmδe和CLδf综合最大,并且使阻力板偏角尽可能靠近δbm。最小值可使无人机在着舰过程中对外界扰动的抑制效率最大,并具有充分的双边操纵余量。
3 算例仿真及结果分析
对算例无人机进行广义轨迹优化设计,目标函数中δbm=40°,取加权系数k1=30,k2=0.1,k3=100,γ∈[2.5°,5.5°],V∈[40,80] m/s,α∈[0°,12°],θ∈[0°,25°],δT∈[30%,100%],δe∈[-15°,15°],δf∈[-25°,25°],δb∈[0°,80°]。取航空母舰地速为15.5 m/s;海面自然风风速范围为0~20 m/s;无人机初始高度为200 m。
采用MATLAB的fmincon函数对广义轨迹优化设计问题进行求解,得到参数γ,V,α,θ,δT,δe,δf,δb在不同Vw下的优化结果,如图4所示。
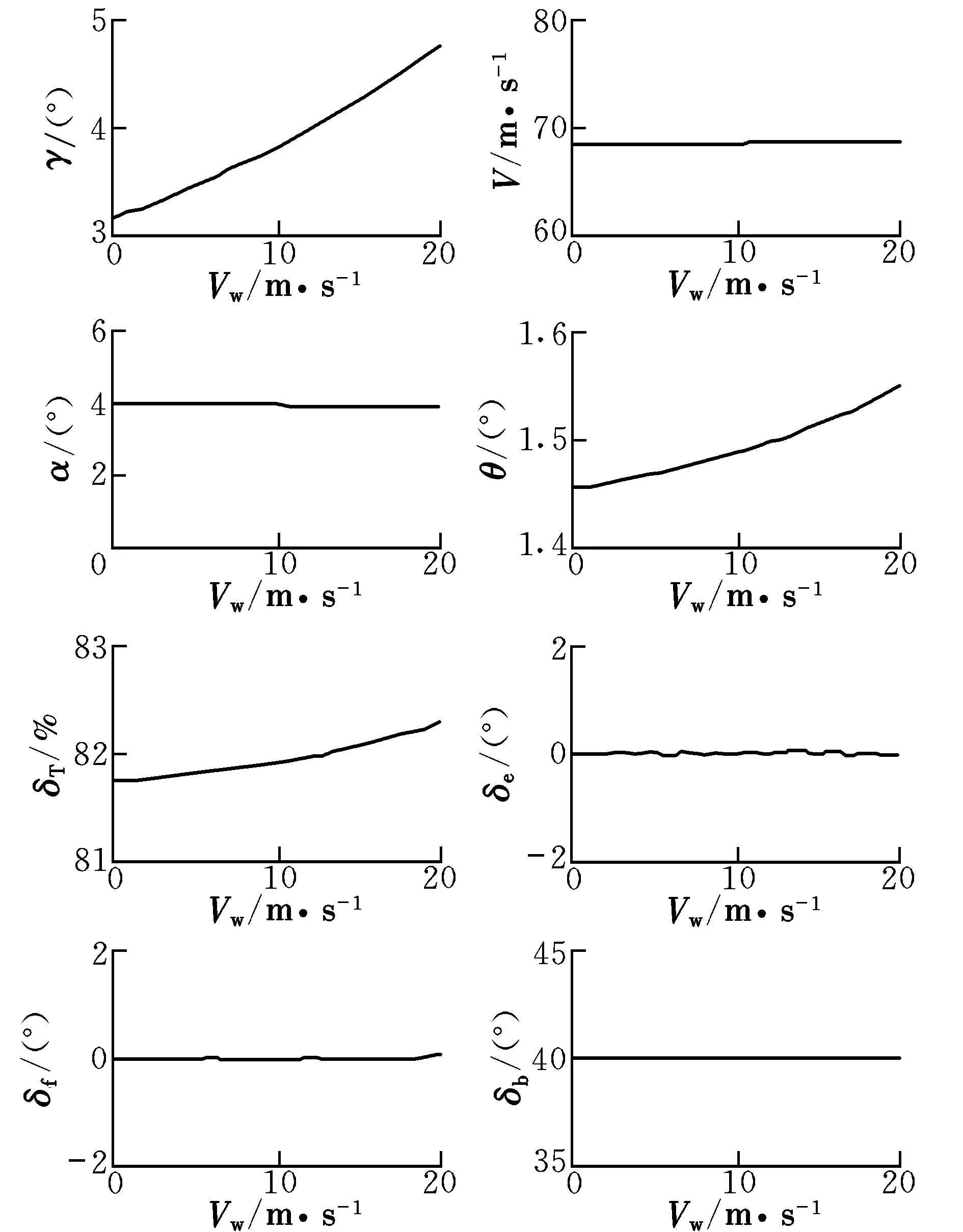
图4 各参数随自然风速变化曲线Fig.4 Curves of parameters changing with the wind speed
由图4可知,在目标函数的约束下,不同Vw下升降舵偏转量和襟翼偏转量均在0°附近;阻力板偏量在阻力中值40°附近,保证了无人机在不同自然风速下都具有合适的双向操纵余量和最大的操纵效率;空速在68.4 m/s左右;迎角在3.9°左右;俯仰角和油门量随Vw有少量变化;相对下滑轨迹角γ随Vw的变化明显,变化范围为3.17 °~4.76°。
依据γ,V,α,δT的优化结果构建无人机不同Vw下的纵向广义轨迹,包括基准相对高度指令Hg、基准迎角指令αg、基准空速指令Vg和基准油门指令δTg:
Hg=Rtanγ
=Rtan(0.002Vw2+0.05Vw+3.17) m
αg=3.9°,Vg=68.4 m·s-1
δTg=0.001Vw2+0.01Vw+81.74
式中:R为无人机距理想着舰点的水平距离。
通过对图4中γ和δT随Vw的变化进行曲线拟合可得:
4 结束语
针对复杂气流干扰下的无人机着舰,本文提出了一种基于DFC的无人机着舰纵向控制策略。该策略能使无人机具有更大的抵制复杂气流干扰的潜力,对下滑轨迹实现精确跟踪。以此为基础,引出无人机广义轨迹概念,并提出广义轨迹设计方案及设计方法。该控制策略和广义轨迹方案可为无人机着舰的工程实践提供相关技术支撑。
[1] 王永庆,罗云宝,王奇涛,等.面向机舰适配的舰载飞机起降特性分析[J].航空学报,2016,37(1):269-277.
[2] 李晓磊,赵廷弟.基于模糊推理的舰载机进舰过程安全性仿真分析[J].航空学报,2013,34(2):325-333.
[3] 胡国才,王奇,刘湘一,等.舰尾流对舰载机着舰轨迹和动态响应的影响研究[J].飞行力学,2009,27(6):18-21,25.
[4] 潘婷婷.舰载机进近着舰航线设计及控制系统仿真[D].南京:南京航空航天大学,2014:33-34.
[5] 崔玫.舰载机全自动着舰引导飞控系统设计[D].哈尔滨:哈尔滨工程大学,2013:30-51.
[6] 邓娟.舰载飞机自动着舰纵向控制系统设计的理论与仿真研究[D].上海:复旦大学,2010:8-10.
[7] 金波.无人机自主着舰纵向控制系统的研究[D].南京:南京航空航天大学,2015:29-38.
[8] Lellis D E,Vito D V,Ruby M,et al.Adaptive algorithm for fixed wing UAV auto landing on aircraft carrier[R].AIAA-2013-4585,2013.
[9] 罗先震,金长江.舰载飞机着舰下滑轨迹控制和分析[J].飞行力学,1993,11(3):31-41.
[10] 刘波.粒子群优化算法及其工程应用[M].北京:电子工业出版社,2010:1-54.
[11] 薛定宇,陈阳泉.高等应用数学问题的MATLAB求解[M].3版.北京:清华大学出版社,2013:201-205.
(编辑:李怡)
Optimum design for generalized landing trajectory of carrier UAV
LIU Xian-fei1, WANG Yong1, ZHANG Dai-bing2
(1.School of Automation Science and Electrical Engineering, BUAA, Beijing 100191, China;2.College of Mechatronics Engineering and Automation, NUDT, Changsha 410073, China)
For the influence of the sophisticated air-wake disturbance on UAV carrier landing, the longitudinal landing trajectory for UAV carrier landing was studied. Firstly, a longitudinal control strategy based on direct force control for UAV carrier landing was proposed on account of the shortcomings of the regular control strategy, and then the concept of generalized landing trajectory was drawn out. After that, considering constraint conditions, the generalized landing trajectory design was converted into a constrained nonlinear programming issue. Generalized landing trajectory was solved at different natural wind speeds, and the function relationship between the trajectory and the natural wind speeds was gained. Results of the example optimization design meet all constraint conditions and the optimization objective, ensuring that the carrier UAV could resist the larger disturbance at different natural wind.
generalized landing trajectory; direct force control; natural wind on sea surface; operating margin
2016-05-07;
2016-08-25;
时间:2016-11-10 09:10
刘宪飞(1992-),男,山东德州人,硕士研究生,研究方向为飞行控制; 王勇(1966-),男,湖北襄樊人,研究员,博士生导师,研究方向为先进控制理论及飞行控制工程应用。
V249.1
A
1002-0853(2017)01-0048-04
