基于NSGA-Ⅱ算法的麦弗逊悬架多目标优化
2017-01-04何志刚盘朝奉
何志刚,陈 阳 ,盘朝奉,2
(1.江苏大学汽车与交通工程学院, 江苏镇江212013;2.江苏大学汽车工程研究院, 江苏镇江212013)
基于NSGA-Ⅱ算法的麦弗逊悬架多目标优化
何志刚1,陈 阳1,盘朝奉1,2
(1.江苏大学汽车与交通工程学院, 江苏镇江212013;2.江苏大学汽车工程研究院, 江苏镇江212013)
为了减小悬架定位参数在轮跳过程中的变化量和变化趋势,以改善整车的操纵稳定性,减小轮胎的磨损,搭建了悬架硬点优化设计的平台。利用多目标/多参数优化软件Isight,联合Adams/Car,在工程可行性约束条件下,应用改进型非支配排序遗传算法NSGA-Ⅱ对悬架系统进行寻优计算,得到Pareto最优解集。优化结果表明,悬架定位参数在车轮跳动过程中的变化量有不同程度的减小;前束角和外倾角变化最明显,变化范围由-1.11°~1.22°降低到-0.2°~0.31°,减小了78.4%,外倾角由-1.12°~1.71°降低到-0.56°~1.27°,减小了35.1%;主销后倾和主销内倾角变化范围分别减小了3.1%和4.1%,有效地降低了轮胎磨损,使整车的操纵稳定性能有所改善。
麦弗逊悬架;灵敏度分析 ;硬点;多目标优化;NSGA-Ⅱ算法
0 引 言
麦弗逊独立悬架结构,构造简单、空间占用小、质量轻、成本低、可维护性能好以及良好的响应和操控性等优点,被广泛应用各种车型,其运动特性的优劣直接影响汽车的响应性和操控性[1]。如果麦弗逊悬架结构设计不当,就会影响悬架的空间几何运动学参数及其变化趋势,会造成汽车转向沉重,直线行驶时跑偏,轮胎磨损等问题[2]。因此,如何选择合适悬架几何硬点结构布置设计,处理悬架系统多个定位参数随轮跳变化的多目标优化问题被广为研究。文献[3]采用主要目标法的方式,因前束角上跳行程朝正前束变化,将其作为主要目标对转向梯形断开点位置进行优化,优化结果避免了前束恶化现象,主要目标法的局限性在于只能适用于单一目标较为突出的多目标优化问题。文献[4-6]基于加权和法的方式,根据各个分目标函数的重要性确定加权因子,将多目标优化问题统一为单目标函数优化,改善了悬架的运动学特性,但加权和法求解可行域可能会出现优化局部收敛的问题,且对于加权因子会存在主观因素。文献[7-8]基于Pareto 最优的多目标优化,采用非支配排序遗传算法(NSGA-Ⅱ )对悬架跳动过程中车轮定位参数变化进行了优化,获得了Pareto最优解集,使得悬架的运动学特性得到明显改善。
某微型电动车前悬架采用的是麦弗逊悬架,在实际使用过程中存在轮胎磨损的问题,针对这个问题,本文利用Adams/Car对该悬架结构进行动力学仿真分析,分析悬架运动特性定位参数变化范围,找出对轮胎磨损的影响因素。基于Pareto最优多目标优化,采用最优拉丁超立方试验设计和NSGA-Ⅱ算法,以悬架几何硬点位置为设计变量,获得基于悬架前轮定位参数变化范围的Pareto最优解,为汽车悬架系统的优化设计和改进提供参考。
1 Pareto最优解理论及解算方法
1.1 Pareto最优解理论简介
Pareto最优解,又称非支配解,是在进行多目标优化过程时,由于各个子目标可能是相互冲突的,存在一个最优解集合,协调、权衡和折衷各个子目标,使各个子目标函数尽可能都达到最优[9]。对于最小化多目标问题,其Pareto最优解数学描述为:
其中,X=(X1,X2,…,Xp)是一个p维向量,fi(x)是目标函数,hk(X)=0是目标函数的约束。假设任意给定两个决策变量,X,X*∈U, 若X*∈U,且不存在X∈R,使得fi(X)≤fi(X*),则X*为Pareto最优解,即无法在改进任何目标函数的同时不削弱至少一个其他目标函数[10]。
1.2 解算算法
对于实际工程,多目标遗传算法(MOGA)是解决有约束多目标问题的有效方法[11-12]。而NSGA-Ⅱ具有求解Pareto解集最具代表性的方法,其继承了遗传算法的优点,采用带有精英策略的快速非劣排序法以及简单的拥挤算子,使准Pareto域中的个体均匀分布扩展到整个Pareto域,将父代优良个体与其产生的子代种群组合进入下一代共同竞争择优,从而加大选优的工作量,这样不仅提高全局寻优能力和收敛速度,而且保证种群的多样性以及优良种群不被丢弃,大大提高了优化结果的精度。
2 前悬架参数分析
2.1 麦弗逊悬架模型的建立
为了分析悬架运动学特性,在建立麦弗逊前悬架运动学模型时,理论结构的简化和假设是必要的:首先假设悬架系统各零部件都是刚体,弹性元件、阻尼元件不包括在内;其次,各部件间连接运动副之间相对运动不考虑摩擦力;最后,研究悬架特性时,车身相对于地面不动,简化后的麦弗逊式悬架结构示意图如图1所示[13]。
根据某微型电动车的悬架转向系统参数,上述的简化和拓扑结构,利用Adams/Car建立麦弗逊悬架虚拟样机运动学模型如图2所示。
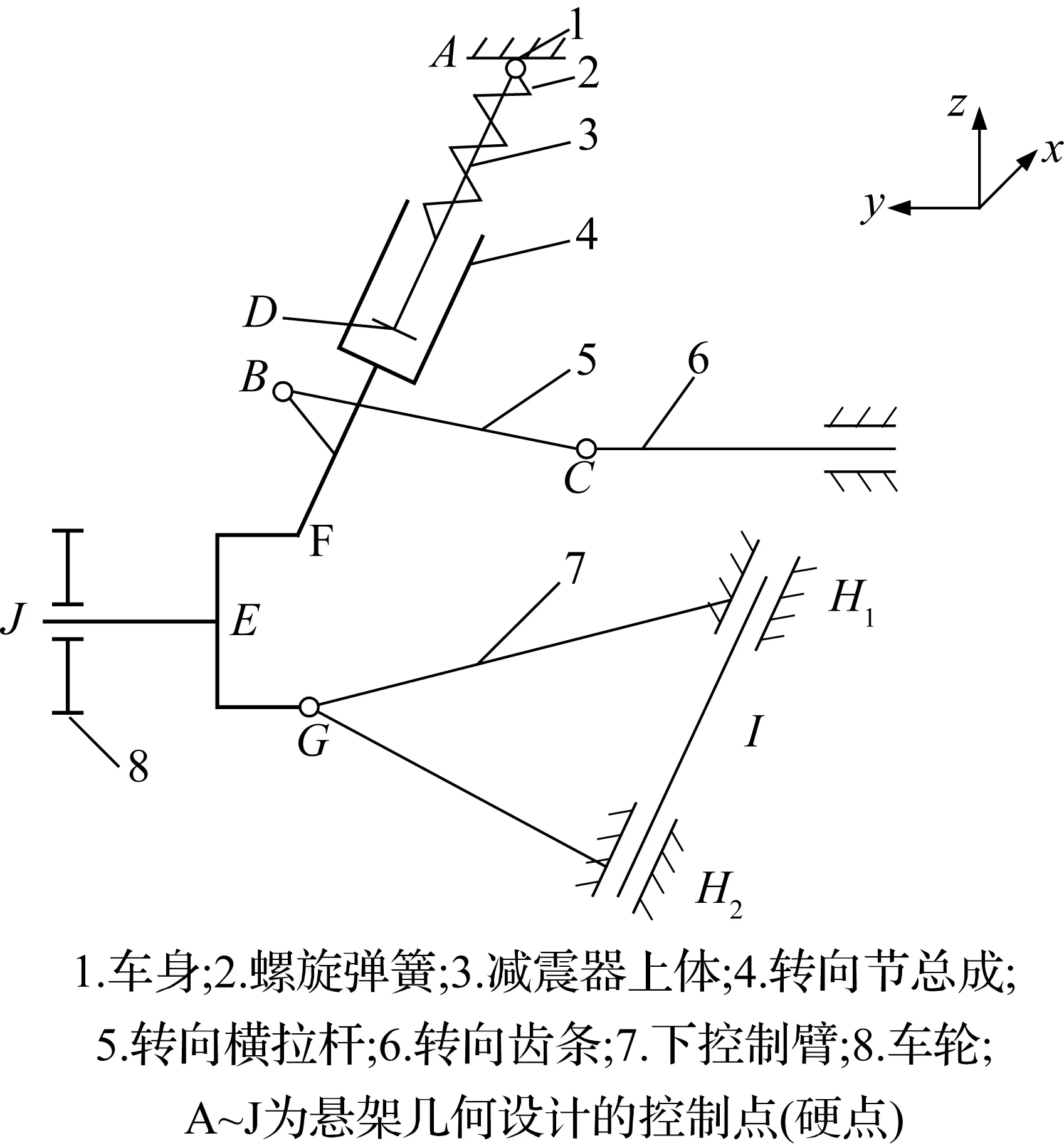
图1 麦弗逊式前悬架结构简图
Fig.1 Schematic structure of the Mcpherson front suspension
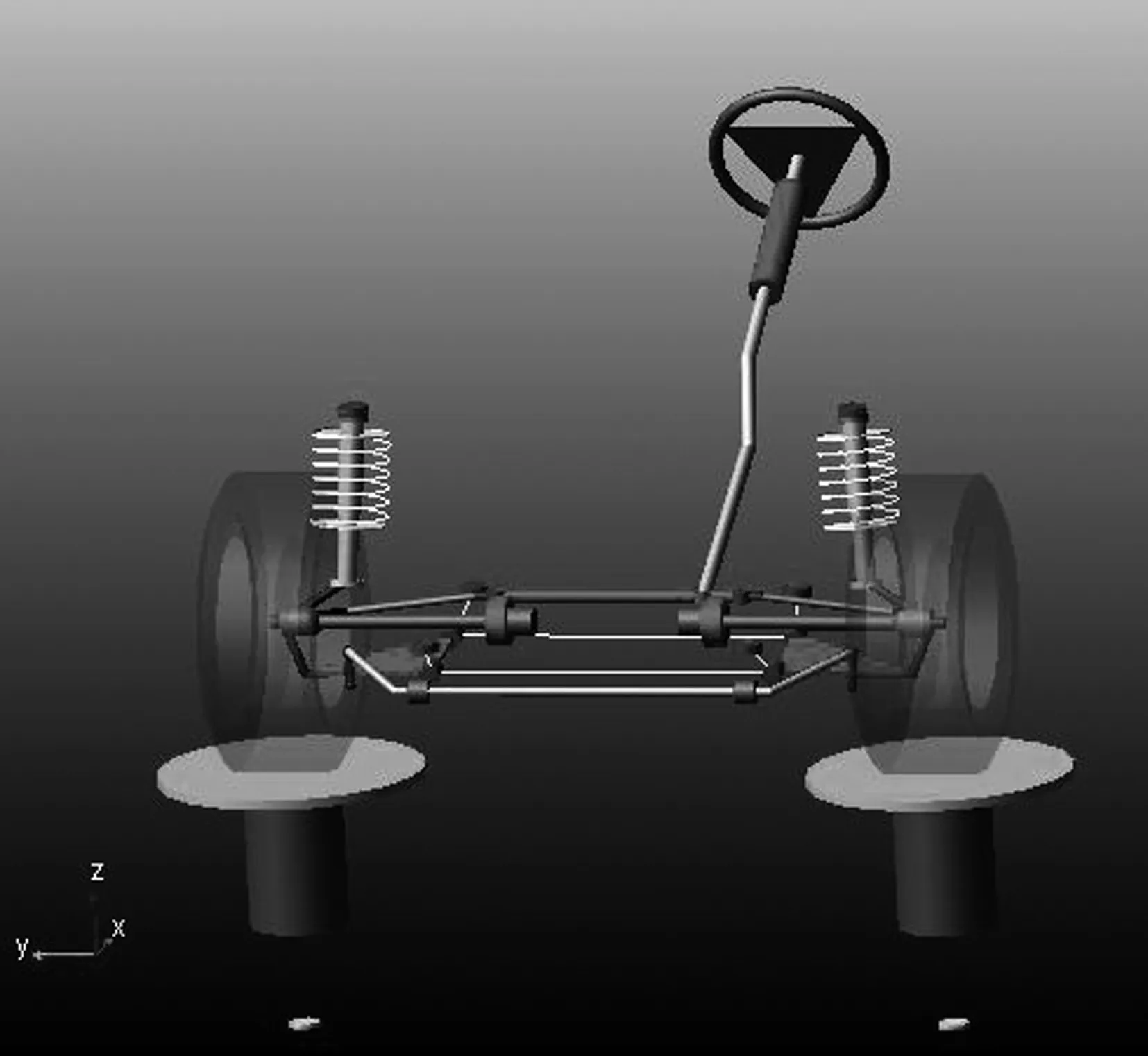
图2 麦弗逊式悬架多体运动学模型
Fig.2 Multi-body dynamics model of the Macpherson suspension
2.2 麦弗逊悬架运动学分析
双轮同向跳动仿真工况是对车轮在实际工况中悬架运动的实时模拟,为客观地分析悬架运动学参数性能提供参考。本文设置悬架在-50 mm到50 mm范围内进行平行轮跳仿真试验,定位参数随轮跳的变化曲线如图3所示。
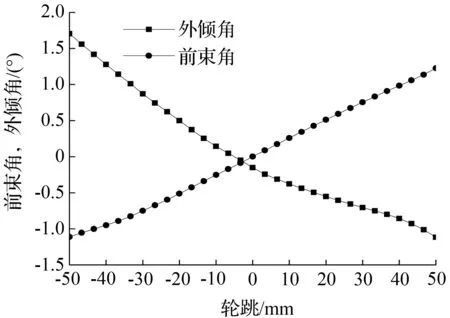
(a) 前束角、外倾角
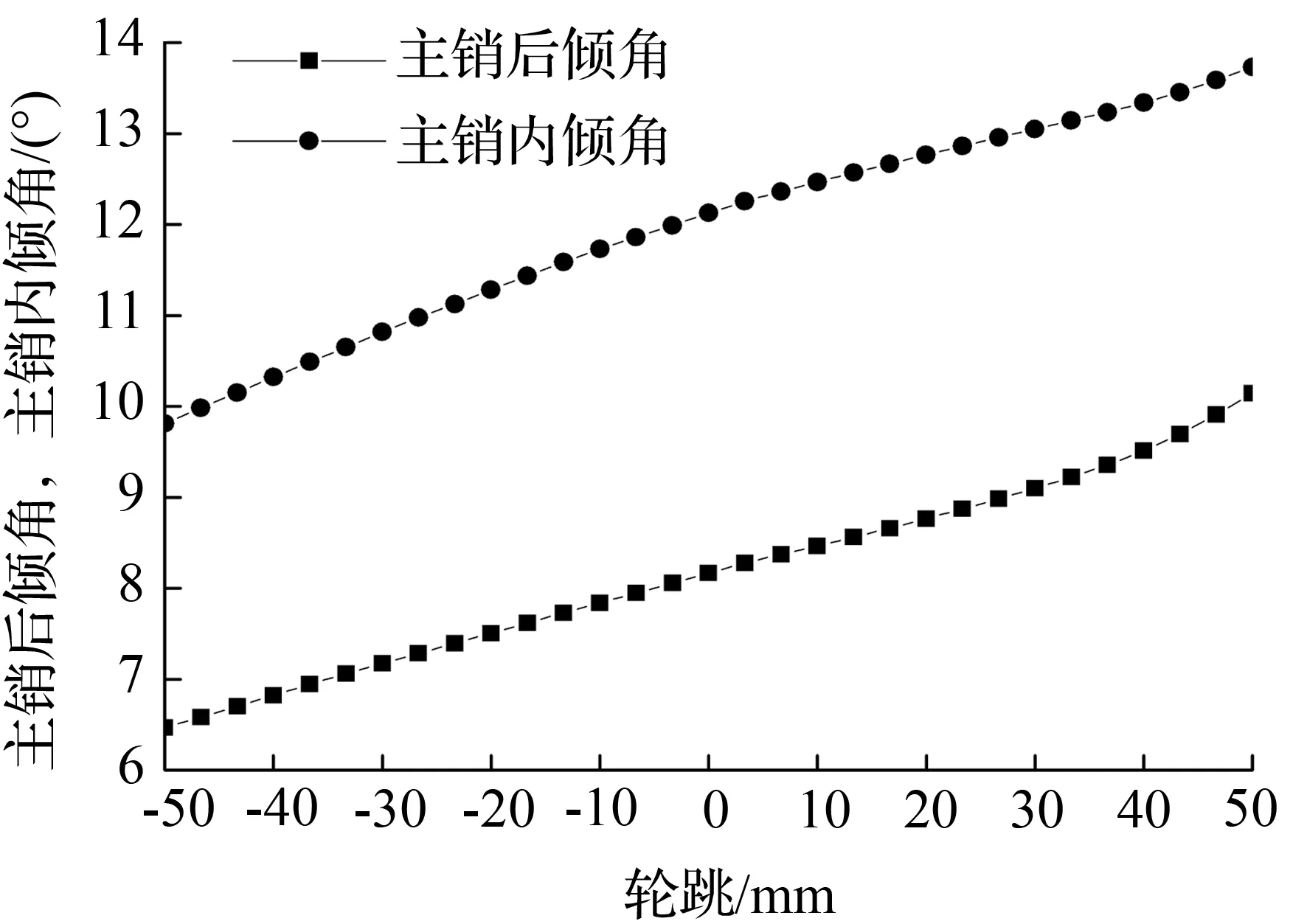
(b) 主销后倾角、主销内倾角
图3 悬架定位参数的变化曲线
Fig.3 Variation curve of suspension alignment parameters
从前束角曲线可以看出,车轮上跳时朝正前束变化,下跳时向负前束变化,不符合理论设计的要求,容易引起前轮过多转向,会有甩尾趋势;并且前束角的变化范围为-1.11°~+1.22°/50 mm,可以看出其变化速率和变化范围相对过大,不利于车辆直线行驶,同时引起轮胎侧偏,增大滚阻,加剧轮胎磨损,对车辆的操纵稳定性非常不利。
从外倾角曲线可以看出,外倾角的变化趋势在车轮上跳时向负值变化,下落时向正值变化,基本符合设计要求,但其变化范围为-1.12°~1.17°/50 mm,变化范围过大。一般为了保证轮胎的侧偏性能,悬架设计上要求有一定负外倾变化以保证轮胎与路面的充分接触,但变化范围不宜过大,减少对车辆稳态响应的影响,车轮跳动时外倾角的变化量不宜过大,一般外倾角变化的适当范围为(-2°~0.5°)/50 mm 较为适宜。
从主销后倾角和主销内倾角曲线可以看出,其变化趋势符合设计的要求,其主要作用是产生回正力矩,以减小车轮转向过程中的操纵力,若变化范围过大,主销后倾角会引起转向沉重,甚至带来过大的负外倾变化,加重轮胎磨损;而主销内倾角会造成轮胎滑动距离过大,造成轮胎磨损。因此,合理的转向节定位、主销定位及轮距等参数变化范围对车辆的动力性、制动性和操稳性等性能有重要的作用[14]。
3 基于遗传算法多目标优化设计
3.1 优化目标的选取与目标函数的建立
根据以上各个参数之间的分析,故将减小车轮定位参数在行驶过程中的变化范围和变化趋势作为优化目标。
根据优化的目标,选择将前束角、外倾角、主销后倾角、主销内倾角设立为目标函数,如表1所示。
表1 悬架性能指标
Tab.1 Suspension performance index

参数目标指标前束角Toeobject|Toemax⁃Toemin|外倾角Camberobject|Cambermax⁃Cambermin|主销后倾角Casterobject|Castermax⁃Castermin|主销内倾角Kingpin_inclobject|Kingpin_inclmax⁃Kingpin_inclmin|
3.2 设计变量的灵敏度分析
悬架系统定位参数的变化主要受布置硬点位置的影响,硬点设计是整车架构开发的基础,决定了整车动力学性能的优劣。根据空间布置和优化设计目标要求,设计变量选择为:下摆臂前端点(lca_front),下摆臂外端点(lca_outer),下摆臂后端点(lca_rear),减振器下安装点(strut_lower_mount),转向横拉杆内端点(tierod_inner),转向横拉杆外端点(tierod_outer),减振器上安装点(top_mount)7 个硬点的在X、Y、Z方向总共21个设计变量因子,根据当前设计因子与目标函数的数目,此问题属于多参数多目标的优化问题,需要先对众多的变量因子进行灵敏度分析(DOE),然后找出对目标影响最为显著的因子作为主要的设计变量。通过灵敏度分析进一步确定最终的优化变量。
根据选择变量因子的数目,本文采用最优拉丁超立方试验设计法进行灵敏度分析,利用其良好的空间填充性和均衡性,将所有试验变量因子均匀分布在设计空间,从而使得变量因子和目标函数响应的拟合更加精确真实[15]。灵敏度分析对目标响应的贡献率如图4所示。

图4 平行轮跳时硬点对设计目标特性的灵敏度Fig.4 Sensitivity of the hard point to the design targets in the parallel travel
从灵敏度分析中可以看出,所有变量因子中有7个硬点坐标对目标响应贡献率比较大,可以作为显著性影响因子,分别是DV3 (lca_front_z),DV6 (lca_outer_z),DV9 (lca_rear_z), DV12(tierod_inner_z),DV15(tierod_outer_z),DV17(top_mount_y),DV20 (strut_lower_mount_y),故将上述7个坐标位置选择为设计变量。因此,根据优化目标和设计变量因子,并且根据空间布置要求,本文建立的悬架系统优化的数学模型可如下表示:
3.3 遗传算法优化
由于悬架具有多个运动学目标特性,且各子目标之间往往存在冲突而很难找到一个使所有目标函数同时达到最优的解,只能在各个目标之间进行协调和权衡,尽可能使各子目标均达到最优[16]。本文采用NSGA-Ⅱ算法,利用其探索性能好、搜索效率高等优点,设置种群个体数为40,进化40代,交叉概率为0.9,进行1 600次的迭代运算。优化流程如图5所示。
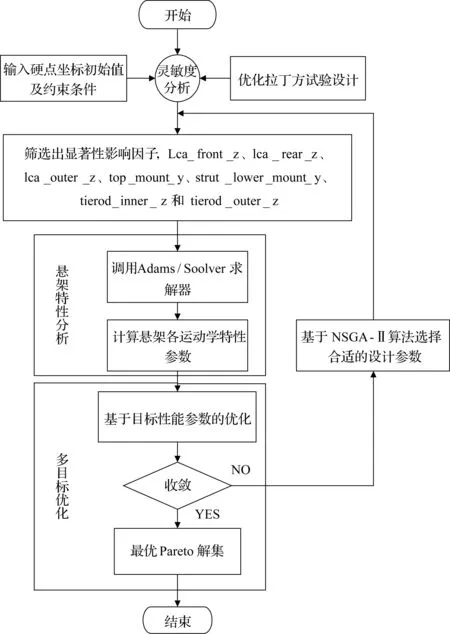
图5 Adams/Car与Isight联合仿真优化流程图Fig.5 Optimization flow chart between Adams/Car and Isight
3.4 优化结果与分析
经过反复的迭代循环优化计算,优化目标参数均收敛至约束范围内,得到目标函数理论的Pareto最优解集,同时获取设计变量最优值,优化前后变量坐标对比如表2所示。

表2 优化前、后关键点坐标位置Tab.2 Coordinates of key points before and after optimization mm
利用优化得到的关键点坐标位置,重新建立车辆多体动力学模型进行计算,并将优化前模型求解结果进行对比,优化前、后悬架运动学特性对比,如图6和表3所示。
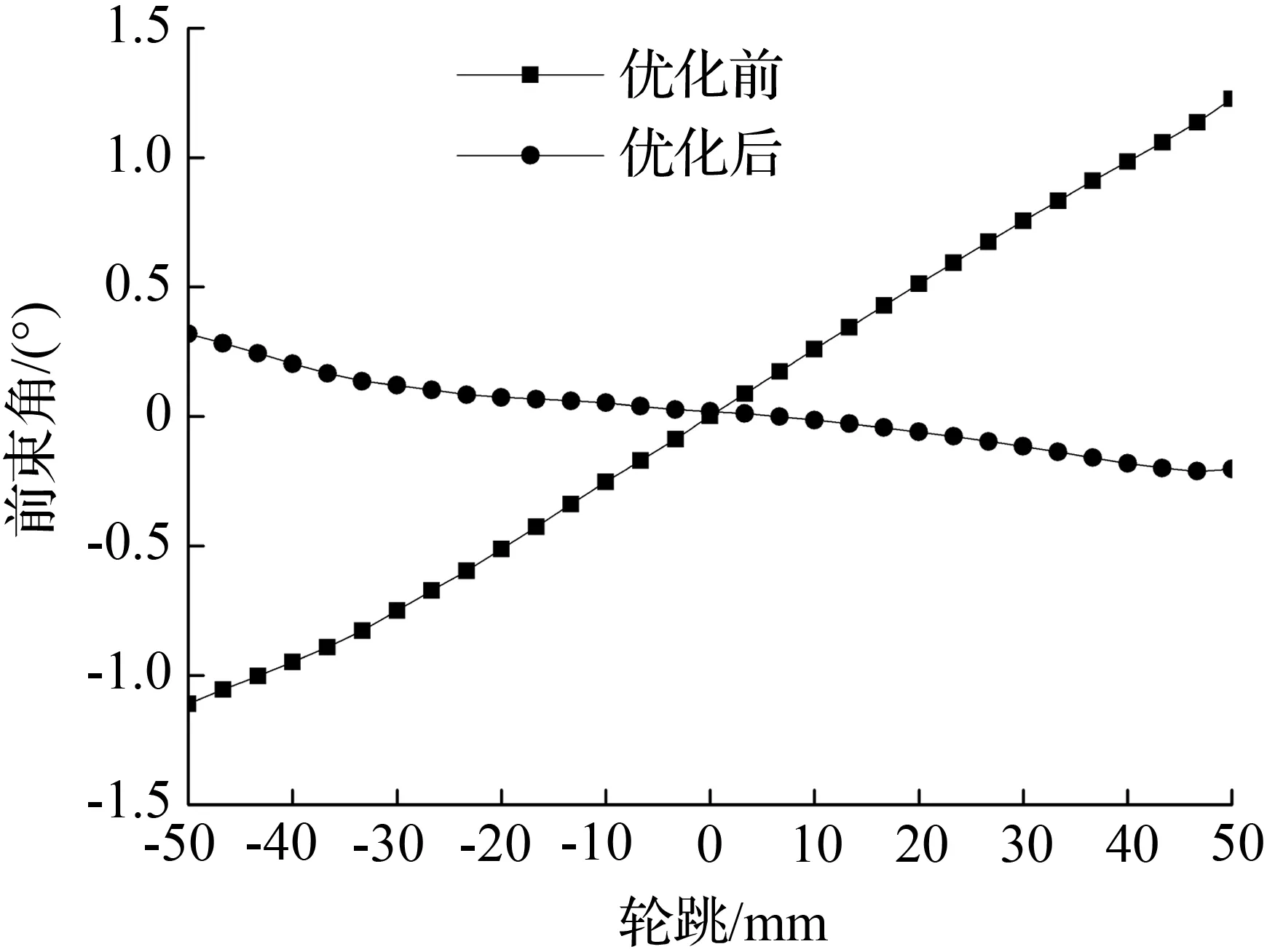
(a) 前束角
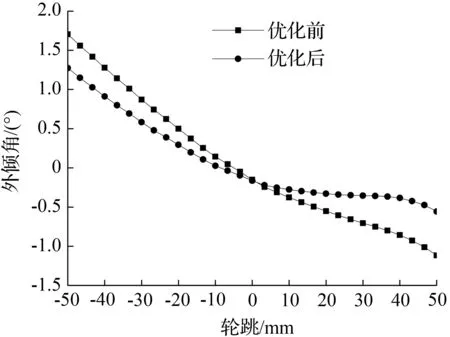
(b) 外倾角
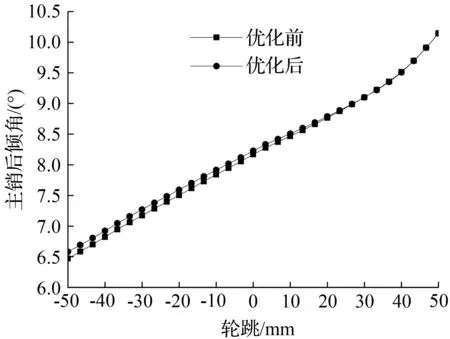
(c) 主销后倾角
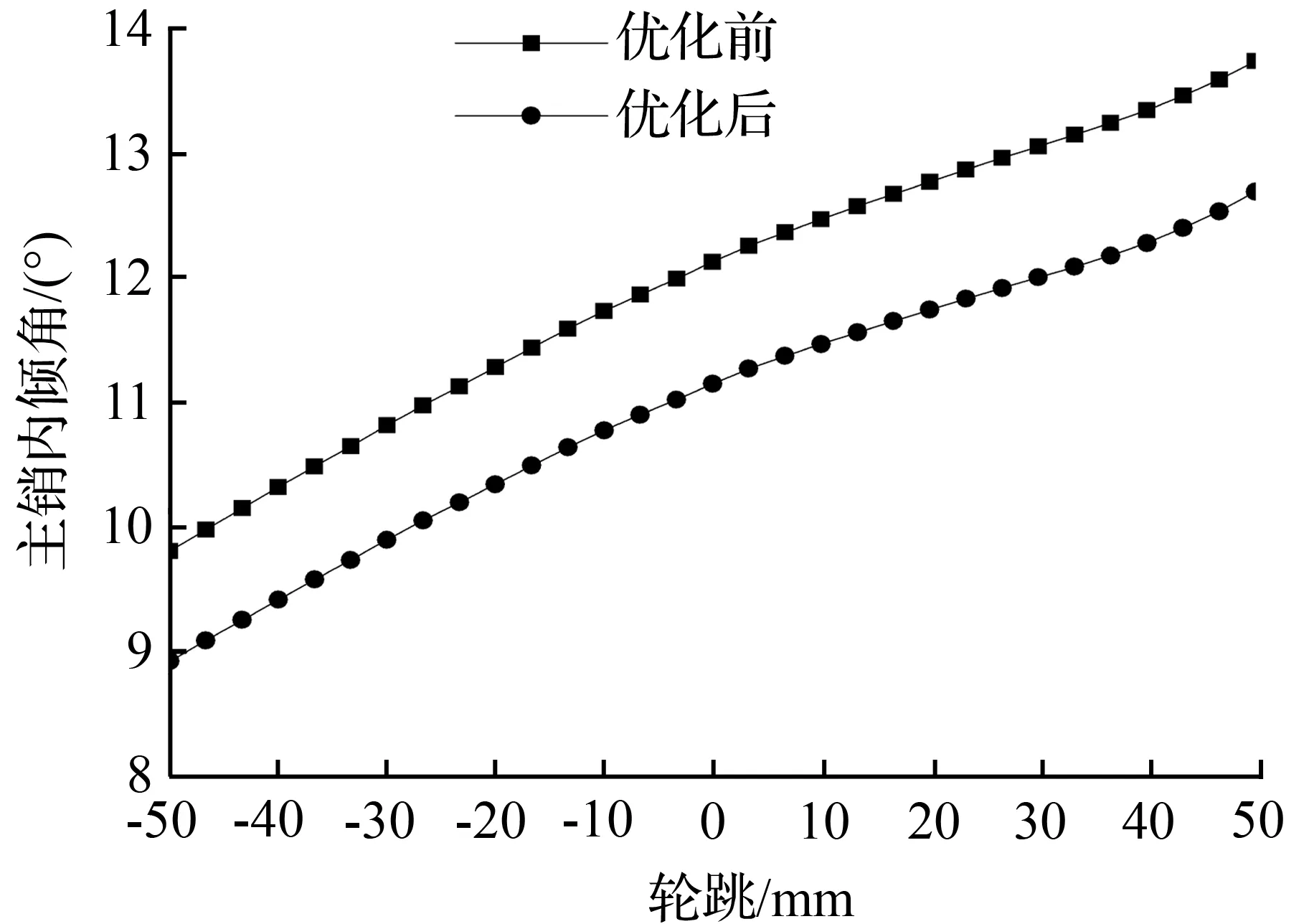
(d) 主销内倾角
图6 优化前后车轮定位参数随轮跳变化曲线对比
Fig.6 Change curve comparison of the wheel alignment parameters with the wheel jump before and after optimization
表3 优化前后目标变量变化对比
Tab.3 Before and after optimization objective variable change

定位参数优化前优化后变化区间变化幅度变化区间变化幅度优化后变化幅度/%前束角/(°)-111~122233-02~031051-784外倾角/(°)-112~171282-056~127183-351主销后倾角/(°)647~1015367658~1014356-31主销内倾角/(°)98~137375893~1269392-41
从图6和表3中可以看出,优化后,随着整个跳动行程变化,外倾角、主销后倾角、主销内倾角等参数的变化范围均有所减小,与优化前相比分别减小了35.1%,3.1%,4.1%;前束角的变化范围减小了78.4%,改善效果最明显,且随轮跳朝着负前束变化。总体来说,通过优化调整悬架结构几何空间布置,改善定位参数的变化,可以较好地解决轮胎磨损问题。
4 结 论
①利用Isight和Adams/Car构建了麦弗逊悬架的优化平台,利用灵敏度分析方法定量地评估硬点坐标对轮跳时悬架运动指标和转向性能参数影响的大小,并定位对目标性能较大的硬点坐标方向,有助于设计优化悬架几何结构布置。
②采用多目标/多参数的遗传算法与多体运动学模型相结合的方法,利用NSGA-Ⅱ算法对悬架系统的性能目标参数进行有约束优化设计,外倾角、主销后倾角、主销内倾角等参数的变化范围与优化前相比分别减小了35.1%,3.1%,4.1%;前束角的变化范围减小了78.4%,通过运动学分析结果显示,优化后该车前轮定位参数变化范围和变化趋势符合设计要求,验证了该优化方法的有效性。
[1] 陈家瑞.汽车构造:下册[M]. 北京:人民交通出版社,1995: 238-251.
[2] 王家豪,兰凤崇,张浩锴,等.双横臂悬架运动学特性设计分析[J]. 机械设计与制造, 2013,51(8):1-4.
[3] 秦伟,耿庆松,黄勇刚,等.某车型麦弗逊转向悬架分析与优化设计[J]. 农业机械学报,2014,45(10):15-21.
[4] 王若平,栾志毅,毛晨曦,等.基于ADAMS/CAR麦弗逊式前悬架的优化设计[J]. 广西大学学报(自然科学版),2014,39(2):294-299.
[5] 李伟平,张宝珍,王磊,等.基于Kriging近似模型的某轿车前悬架不确定性优化[J]. 中国机械工程,2012,23(24):3006-3012.
[6] HOSEIN H,KOUROSH H,MOHAMMAD S.Roll steer minimization of McPherson-strut suspension system using genetic algorithm method[J]. Mechanism and Machine Theory,2008,43(1):57-67.
[7] 奉铜明,钟志华,闫晓磊,等.基于NSGA-Ⅱ算法的多连杆悬架多目标优化[J]. 汽车工程,2010,32(12):1063-1066.
[8] 冯金芝,杨涛,郑松林.基于NSGA-Ⅱ算法的悬架结构硬点多目标优化[J]. 汽车技术,2014,45(12):5-8.
[9] 饶江, 胡树根, 宋小文,等.汽车悬架优化过程的Pareto最优解[J]. 机电工程,2010,27(6):28-31.
[10]王小平,曹立明.遗传算法—理论,应用与软件实现[M]. 西安: 西安交通大学出版社,2002.
[11]LONG Q.A constraint handling technique for constrained multi-objective genetic algorithm[J]. Swarm & Evolutionary Computation,2013,15(1):66-79.
[12]DEB K,PRATAP A,AGRAWAL S,et al.A fast and elitist multi-objective genetic algorithm: NSGA-Ⅱ[J]. IEEE Transaction on Evolutionary Computation,2002,6(2):182-197.
[13]杨荣山,黄向东,袁仲荣,等.多目标优化方法在悬架几何设计上的应用[J]. 华南理工大学学报(自然科学版),2009,37(7):85-89.
[14]陆建辉,周孔亢,郭立娜,等.电动汽车麦弗逊前悬架设计及参数优化[J]. 机械工程学报,2012,48(8):98-103.
[15]徐龙,舒进,杨万安,等.前期整车后悬架硬点优化设计[J]. 汽车技术, 2015,46(10):11-14.
[16]张宝珍,阿米尔,肖思俊.基于区间不确定性的前悬架多目标可靠性优化[J]. 汽车工程, 2015,37(6):707-713.
(责任编辑 梁 健)
Multi-objective optimization of Macpherson suspension based on NSGA-Ⅱ algorithm
HE Zhi-gang1,CHEN Yang1,PAN Chao-feng1,2
(1.School of Automotive and Traffic Engineering, Jiangsu University, Zhenjiang 212013, China;2.Automotive Engineering Research Institute, Jiangsu University, Zhenjiang 212013, China)
In order to reduce the variation and trend of the alignment parameters of suspension in the process of wheel jumping and to enhance the vehicle handling stability, a platform is established for the optimization design of suspension hard points. The platform is processed as follow: By using multi-objective and multi-parameter optimization software Isight and Adams/Car, the improved non-dominated sorting genetic algorithm NSGA-Ⅱ is applied on the suspension system for optimization calculation to obtain the Pareto optimal solution set under the engineering feasibility constraints. The optimization results show that the variation and trend of the alignment parameters of suspension are reduced distinctly in the process of wheel jumping; The variation of toe and camber changes obviously, the toe is ranged from -1.11°~1.22° to -0.2°~0.31°, reduced by 78.4%, and the camber is ranged from -1.12°~1.71° to -0.56°~1.27°, reduced by 35.1%. Besides, the variation range of caster and kingpin inclination is reduced by 3.1%, 4.1% respectively, which can effectively reduce the tire wear, and improve the vehicle handling stability.
Macpherson;sensitivity analysis;hard point;multi-objective optimization;NSGA-Ⅱ algorithm
2016-08-16;
2016-09-19
国家自然科学基金资助项目(51105178);江苏省自然科学基金资助项目(BK2011489)
何志刚(1975—),男,江苏镇江人,江苏大学副教授,博士;E-mail:hezg@mail.ujs.edu.cn。
何志刚,陈阳,盘朝奉.基于NSGA-Ⅱ算法的麦弗逊悬架多目标优化[J].广西大学学报(自然科学版),2016,41(6):1807-1814.
10.13624/j.cnki.issn.1001-7445.2016.1807
U463
A
1001-7445(2016)06-1807-08
