基于凸集理论的绳牵引串并联机器人工作空间算法
2016-10-13董晓东段清娟段学超
董晓东 段清娟 马 彪 段学超
1.西安电子科技大学,西安,7100712.电子装备结构教育部重点实验室,西安,710071
基于凸集理论的绳牵引串并联机器人工作空间算法
董晓东1段清娟1马彪1段学超2
1.西安电子科技大学,西安,7100712.电子装备结构教育部重点实验室,西安,710071
为求解m≥n(m为绳索数目,n为机构自由度)绳牵引串并联机器人的力旋量可行工作空间,提出一种基于凸集理论的非迭代求解算法。该算法利用闵可夫斯基之和的性质构造绳索的旋量集,借助非迭代的数学思想验证该旋量集是否完全包含外部旋量集。首先,通过确定初始超平面找出凸集所有的边界超平面,根据初始超平面偏移的距离确定边界超平面投影位置; 然后推导出旋量平衡的判定表达式,并采用数值分析的方法得到绳牵引机器人的力旋量可行工作空间;最后,采用该算法对两种典型的绳牵引串并联机器人进行工作空间求解,结果验证了所提出的基于凸集理论工作空间求解方法的有效性。
绳牵引机器人;工作空间;旋量理论;凸集理论
0 引言
绳牵引机器人是一种用柔性绳索代替传统刚性连杆的新型机器人,通过电机驱动绞盘改变每根绳索的长度,实现末端执行器不同的位姿。它以工作空间大、负载惯量比高、响应速度快、执行器易重构等优点,广泛地应用在许多领域,如美国NIST研发的应用于飞机喷涂、造船、废物清理等领域的RoboCrane[1],日本RitSumeikan大学研制的用于高速装配的超高速绳牵引并联机器人FALCON[2],以及国内用于控制500 m口径大型射电望远镜的馈源舱项目[3]等。
尽管绳牵引机器人有着各种各样的优势,但它也是有一定缺陷的:驱动绳索只能受拉而不能受压的工作特性,使得n自由度的绳牵引机器人至少需要n+1根绳索来实现末端执行器的确定运动[4-5]。在求解工作空间过程中,要求电机能够驱动绳索产生一定的旋量集(力和力矩),而且外部的被动力对绳索保持张紧也起了有效的作用。文献[6-7]利用弹簧既受拉又受压的特性,合理地给机构布置弹簧从而改善绳牵引机器人的工作空间。
已有不少的学者基于凸集理论分析了绳牵引机器人的工作空间。Ebert-Uphoff等[8]定义旋量工作空间为末端执行器能够抵消的外部旋量集,并给出了力旋量封闭的一般判定方法。Bosscher等[9]利用可行净旋量集的性质计算力旋量工作空间的边界,并将此方法应用到复杂工作空间的求解中。Bouchard等[10]从几何学的角度分析了旋量集的构成,结合凸多面体的性质构造并计算了可行旋量集。但相关文献对工作空间的求解大多只侧重于旋量集的分析,很少对于绳牵引机器人工作空间普遍适用的求解算法作详尽阐述。鉴于此,本文基于旋量理论提出了一种同时适用于绳牵引串并联机器人工作空间的一致求解算法。
1 基本原理
1.1定义两种旋量集
考虑到电机功率和绳索强度的限制,同时又为了避免绳索虚牵状况的发生,每条绳索的拉力需要在一定的范围内变化。因此,机构在给定的位姿下能够产生特定的旋量集,以满足不同任务需求的旋量。
首先,由绳拉力及绳的布局等机构特性决定的末端执行器所能产生的旋量集合称为可行旋量集(the available wrench set)[10],简记为A,且
A={ξ:ξ=JTT}
(1)
其中,JT为单位旋量矩阵,且有
(2)
T为拉力矩阵,有
T=[t1t2…tm]T
(3)
对于m≥n型绳牵引机器人,旋量矩阵JT中向量Ji为第i根绳索作用于末端执行器上的单位旋量,方向由末端执行器铰接点指向电机铰接点。ti为第i根绳索的拉力,绳索的最小拉力是为了避免虚牵,最大张力由电机的转矩确定。
绳牵引机器人的许多应用中,都要求末端执行器能够产生特定的旋量集以平衡外部旋量,文献[10]定义该旋量的集合为由特定任务要求所组成的任务旋量集。本文把作用于末端执行器上的所有旋量集合称为外部旋量集(the external wrench set),记为E,且
(4)

为实现不同的任务要求,旋量集之间必须满足以下判定条件:
E⊂A
(5)
式(5)的数学含义在二维空间内可以理解为:在一个给定的位姿下,机器人所产生的旋量集必须包含任务要求的旋量集。由式(5)可以演化出机器人平衡方程的一般形式:
JTT+W=0
(6)
式中,W为外力旋量。
1.2奇诺多面体的定义与性质
奇诺多面体(Zonotope)[10]是指在欧几里德空间里一些有限封闭线段的闵可夫斯基之和(Minkowski Sum)[11],可以简单地理解为一些封闭线段的矢量和。若{v0,v1,…}为欧几里德空间里的一个矢量组合,则这些矢量的闵可夫斯基之和组成奇诺多面体,记为{∑xivi|0≤xi≤1},xi为变化系数,vi为单个矢量,这些矢量被称为奇诺多面体的发生元[10]。需要注意的是,二维平面里我们通常把奇诺多面体当作是凸多边形,三维及其以上空间里当作是凸多面体,均关于几何中心对称。
图1给出了4条线段集分别在欧几里德二维和三维空间里的闵可夫斯基之和。二维空间里,四条线段集的闵可夫斯基之和为一个凸多边形,三维空间里为一个凸多面体。

图1 4条线段集在二维和三维空间的闵可夫斯基之和
从几何意义上来看,凸多面体是由一些最基本的线段矢量在不同的空间里组合而成,而绳牵引机器人在末端执行器产生的旋量集可以看作是一些绳索在指定的拉力范围下的矢量线段和。因此,A可以借助奇诺多面体的性质来进行求解分析。
其次,闵可夫斯基之和还可以应用于多面体之间,两个凸多面体的闵可夫斯基之和仍为凸多面体,如:在欧几里德d(d≥3)维空间里,两个封闭凸多面体X和Y的闵可夫斯基之和可以表示为凸多面体Z[11]:
Z=X⊕Y={x+y|x∈X,y∈Y}
(7)
其中X、Y可以当作是凸包,为Rn中所有包含集Si的凸集的交集,X的形式为
(8)
1.3可行旋量集的性质
由于E是由不同绳牵引机器人对应的应用所决定的,其所受的广义力也随末端执行器的任务需求而改变,所以本文主要侧重于A性质的探讨。由式(6)可以把A写成以下形式:

(9)
其中,ti为第i根绳索的拉力,Ji为第i列单位旋量矩阵的旋量,j为所有绳索对末端执行器的旋量。
借助于奇诺多面体的定义和性质,绳牵引机器人的A可以当作是由绳索拉力矢量构成的闵可夫斯基之和。因此在实际分析过程中,A的求解问题可以抽象为绳索矢量闵可夫斯基之和的求解问题。首先,需要把A转化为与奇诺多面体表达式一致的形式:

0≤θi≤1}
(10)
其次,式(10)可以写成两个凸包A1和A2的闵可夫斯基之和,其中:

(11)
A2={Jti,min}
(12)
qi=(ti,max-ti,min)Ji

图2 空间三索机器人的构型和可行旋量集
图2以3根绳索驱动的空间并联机器人为例,借助于奇诺多面体和闵可夫斯基之和的性质形象直观地构造出A。图中A由两个凸多面体A1、A2的闵可夫斯基之和构成,其形状由绳索矢量的方向决定,大小由绳索拉力的范围决定。需要注意的是,图中只简单给出了外部旋量的重力矢量,没有考虑末端执行器所受外界的其他广义力。
2 算法及构造
2.1超平面边界法
为了找出凸多面体的边界平面,引入初始超平面和支撑超平面[10]。初始超平面经过矢量的起始点并且垂直于其法向量。支撑超平面经过凸集K边界上任意一点p,p∈Rn,且其法向量为v,v∈Rn,其形式为
Hv(p)={x∈K|vT(x-p)≥0}
(13)
则凸集K被完全分离在支撑超平面Hv(p)的一侧,且凸集K上的一点在支撑超平面上。需要注意的是,这里的支撑超平面通常是在三维空间下定义的,二维平面里的支撑超平面为一条直线。
由图3a可以看出,凸多面体是由位于边界上所有的支撑超平面Hi和Hi′所围而成,因此支撑超平面在本文中也称为边界超平面。图3b所示为由四条封闭线段的闵可夫斯基之和形成的凸多面体以及两种超平面的分布情况。其中向量nij为同时垂直于初始超平面和边界超平面的法向量,方向指向凸多面体的外部,p-、p+分别为两个边界超平面在法向量上的投影点,也即法向量与边界超平面的交点。边界超平面总是成对出现且相互平行,事实上这对边界超平面可以当作是由初始超平面沿着垂直于它的法向量分别平移所得。

(a)支撑超平面的分布 (b)凸多面体图3 凸多面体的超平面分布
基于以上的分析,本文算法的关键在于确定A的法向量nij和边界点p-、p+。由于凸多面体可以当作是它所有边界超平面的交集,因此式(5)的求解可以简化为验证以下的不等式:
(14)
其中,凸k多面体的法向量为Nk=(n1,n2,…,ni,…,nk),外力旋量v为定值,di为由边界点p+和对应的法向量nij所确定的数值。式(14)将多维系统的求解问题转化为一维系统的求解问题。图4以4索3自由度绳牵引机器人为例,给出了所有初始超平面的平移过程,并展示了4个拉力旋量在空间中所有的投影关系。
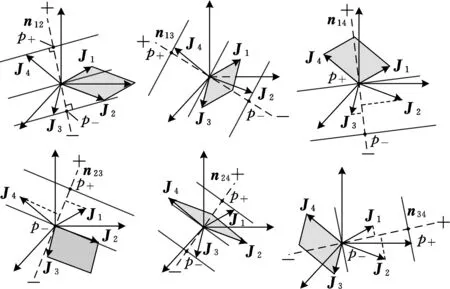
图4 4索3自由度空间机构的所有边界超平面
2.2算法流程
求解m根绳索n自由度(m≥n型)绳牵引机器人旋量可行工作空间的主要步骤如下:
(1)选取初始位姿。对于m根绳索n自由度(m≥n型)绳牵引机器人来说,首先需要根据机器人的构型确定它的工作空间范围,并确定工作空间内逐点扫描的步长,然后选取需要判断的初始位姿,计算出旋量矩阵JT。

ni=q/‖q‖
(15)
(16)
而向量q第c列元素为qc=(-1)c+1·


μ+=ΔT(λ+)nd+Jdtd,min
(17)
μ-=ΔT|λ-|nd+Jdtd,min
(18)
ΔT=ti,max-ti,min其中,nd为凸多面体的第d个法向量,Jd为第d根绳索的单位旋量,td,min为第d根绳索的最小拉力。
因此,借助于初始超平面偏移的距离,A的边界超平面就能完全确定了。
(4)绘制工作空间。按照等步长对工作空间范围内的位姿点依次进行扫描,判断下一个位姿点是否满足判定条件,直到找出满足条件的所有位姿点,可绘制出机器人的可行工作空间。
3 仿真分析
3.1绳牵引串联机器人工作空间
3.1.1模型的建立
绳牵引串联机器人模型主要由机架、驱动器、绞盘、绳索、连杆等组成,本文在此基础上引入了1根弹簧(目的是为了有效改善串联机器人的工作空间[6])。图5为3根绳索、2根连杆和1根弹簧组成的绳牵引平面串联机器人。
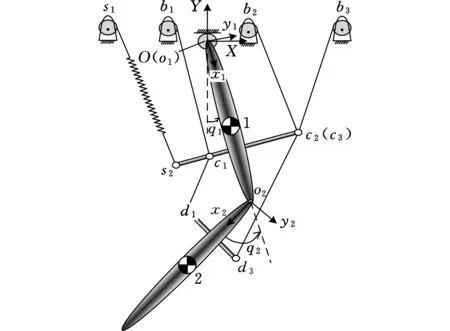
图5 由3根绳索、1根弹簧驱动的串联机器人
图5中,OXY为全局坐标系,o1x1y1、o2x2y2分别是固连在连杆1和连杆2上的局部坐标系,连杆的质心位于其中心处,s2c1c2、d1d3分别为固连在连杆1、2上的轻质刚性杆。b1c1d1、b2c2、b3c3d3分别为各绳索的布局,s1s2为弹簧的布局,其中节点s2、c1、c2、d1、d3处是圆形套环。连杆和弹簧的铰接点坐标在全局坐标系和局部坐标系下的位置如表1所示。
由于求解机构的结构矩阵时需要考虑到连杆间广义力的作用,因此需要考虑机构的动力学问题,机器人在关节空间中的动力学方程封闭形式的一般结构式如下:

表1 绳牵引串联机器人的铰接点坐标

(19)

(20)

(21)
Ls=L-k(ls-ls0)2/2
(22)

(23)
其中,rj为机器人绳索和弹簧的长度,M01、M02为齐次坐标变换矩阵,根据文献[12],rj可写为
r1=|0lOb1-M01·1lo1c1|+
|M01·1lo1c1-M02·2lo2d1|
(24)
r2=|0lOb2-M01·1lo1c2|
(25)
r3=|0lOb3-M01·1lo1c3|+|M01·1lo1c3-M02·2lo2d3|
(26)
rs=|0lOs1-M01·1lo1s2|
(27)
式中,0lOb1为Ob1在全局坐标系下OXY的位置向量;1lo1c1、2lo2d1分别为o1c1、o2d2在局部坐标系o1x1y1、o2x2y2下的位置向量;其他类推。
综上,式(6)可以整理为
(28)
需要指出的是本文引入弹簧的目的并不是为了结构上的改变,主要是为了给机构提供一个大小和方向可控的被动力,也因此有效地增大了机器人的工作空间[6],在计算时需要考虑到弹簧的伸缩特性。
3.1.2数值仿真
串联机器人的相关参数如表2所示。

表2 串联机器人的参数值
利用MATLAB编程,结合以上求解公式和相关参数,求解出绳牵引串联机器人的旋量可行工作空间。图6分别给出了机器人末端在广义坐标和全局坐标下的旋量可行工作空间。

(a)广义坐标

(b)全局坐标系图6 绳牵引串联机器人的可行工作空间
该串联机构的绳索和弹簧分别组成不同的拉力矢量,计算出相应的旋量矩阵,利用上文的非迭代算法可快速求解出满足判定条件的所有位姿点。图6所示的工作空间表明该工作空间符合连杆2末端所能到达的范围,因此该算法对于m≥n型绳牵引串联机器人工作空间的求解有效。
3.2绳牵引并联机器人工作空间
3.2.1模型的建立
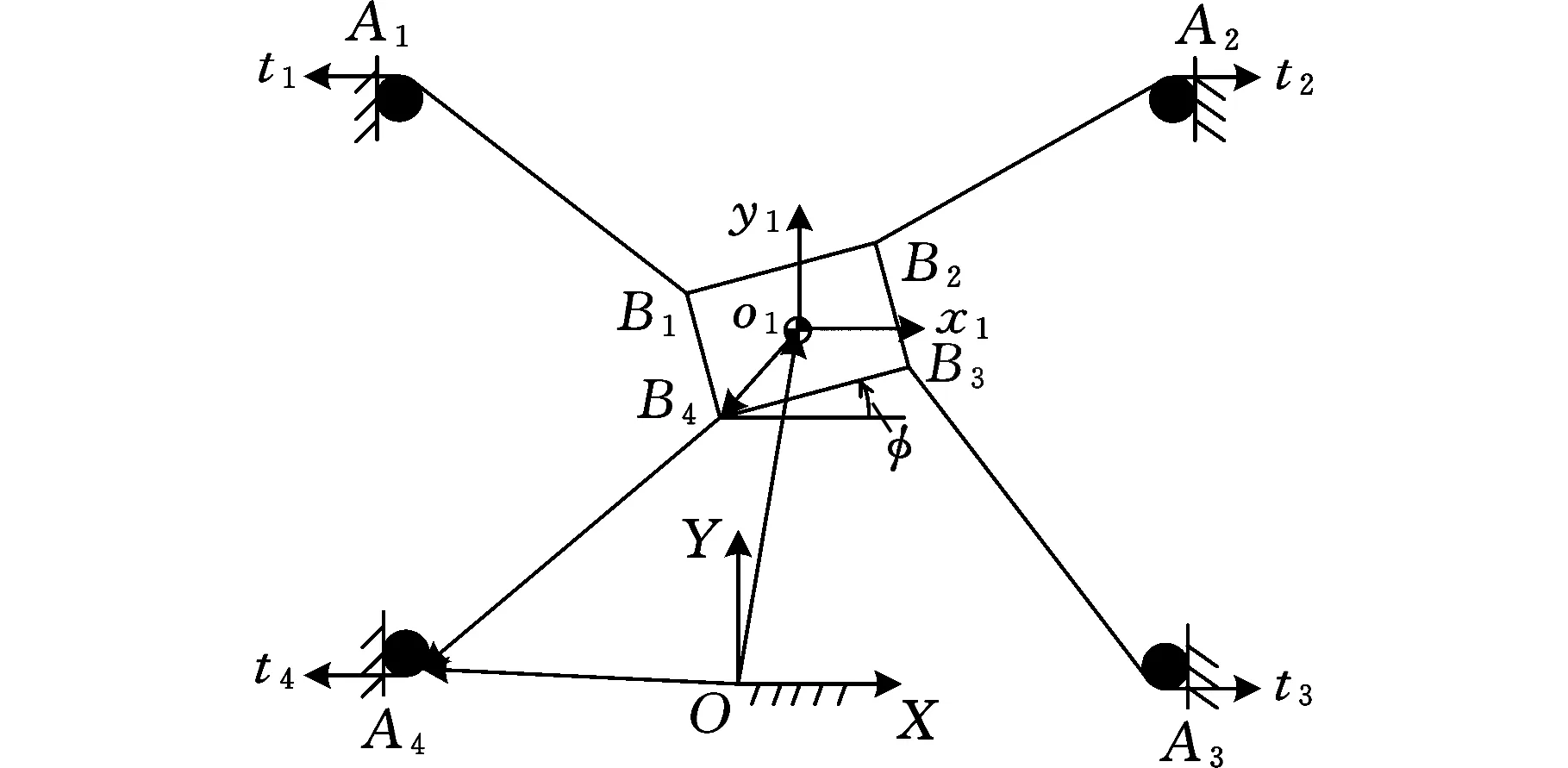
图7 4索3自由度绳牵引并联机器人
图7是4根绳索3自由度组成的绳牵引并联机器人(4-3-CDPPM[13]),图中Ai(i=1,2,3,4)为滑轮与绳索的铰接点,Bi为绳索与动平台的铰接点。假设不计绳索的重力,且不考虑绳索的柔性,OXY是全局坐标系,o1x1y1是固连在动平台上的局部坐标系。第i根绳索的绳长矢量为
Li=oAi-oo1-ori
(29)
式中,oAi为固定铰接点在全局坐标系下的位置矢量;oo1为动平台质心在全局坐标系下的位置矢量;ori为动平台铰接点在全局坐标系下的位置矢量;oR1为局部坐标系到全局坐标系的旋转变换矩阵;1Bi为Bio1在局部坐标系o1x1y1下的位置矢量。
动平台的力旋量平衡方程为
(30)

3.2.2数值仿真
由文献[13]可知绳牵引并联机器人的铰接点坐标及机构的相关参数如表3所示。
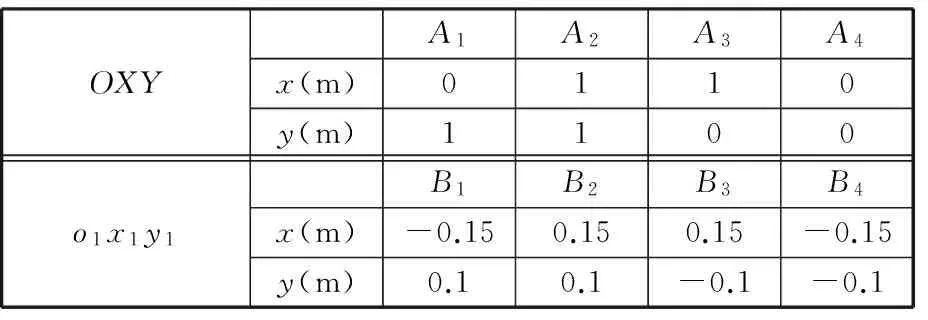
表3 绳牵引并联机器人的铰接点坐标
不计动平台的质量,且外界环境对动平台的力旋量为0,绳索的最小拉力为2 N,最大拉力为500 N。结合以上算法用MATLAB编程求解出4-3-CDPPM分别在φ=0°和3°的旋量可行工作空间,如图8所示。
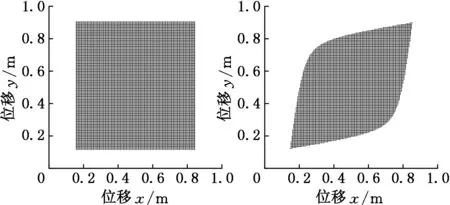
(a)φ=0° (b)φ=3°图8 绳牵引并联机器人的可行工作空间
从图8可以看出,采用基于旋量理论工作空间求解算法得到的结果与文献[13]中采用降维理论得到的工作空间完全相同,从而验证了该算法对m≥n型绳牵引并联机器人旋量可行工作空间求解的有效性。
4 结语
本文提出一种旋量可行工作空间的快速求解算法,同时适用于m≥n型绳牵引串并联机器人。算法考虑到绳索的拉力范围,充分利用奇诺多面体的性质构造出绳索的旋量集合,并用几何方法描绘出4索3自由度空间机器人的超平面分布情况,结合数学方法表示出凸集的边界判定条件,最终得到基于凸集理论的求解算法。用该算法分别对两种典型的绳牵引串并联机器人进行工作空间求解,并与传统求解算法得到的结果进行对比,证明了该算法的有效性。
[1]LytleAM,SaidiKS,BostelmanRV,etal.AdaptingaTeleoperatedDeviceforAutonomousControlUsingThree-dimensionalPositioningSensors:ExperienceswiththeNistRoboCrane[J].AutomationinConstruction, 2004, 13(1):101-118.
[2]KawamuraS,ChoeW,TanakaS,etal.DevelopmentofanUltrahighSpeedRobotFalconUsingWireDriveSystem[C]//ProceedingsoftheRoboticsandAutomation.Nagoya: 1995IEEEInternationalConference, 1995:215-220.
[3]訾斌,段宝岩,杜敬利.超大型天线馈源舱柔索支撑结构动力学分析与跟踪控制[J].控制理论与应用, 2007, 24(6):938-942.
ZiBin,DuanBaoyan,DuJingli.DynamicAnalysisandTrackingControloftheCable-suspendedSystemfortheFive-hundred-meterApertureSphericalTelescope[J].ControlTheory&Applications, 2007, 24(6):938-942.
[4]GouttefardeM,KrutS,PierrotF,etal.OntheDesignofFullyConstrainedParallelCable-drivenRobots[M].Springer:AdvancesinRobotKinematics:AnalysisandDesign, 2008.
[5]MustafaSK,AgrawalSK.OntheForce-closureAnalysisofN-dofCable-drivenOpenChainsBasedon
ReciprocalScrewTheory[J].IEEETransactionsonRobotics, 2012, 28(1):22-31.
[6]DuanQ,VashistaV,AgrawalSK.EffectonWrench-feasibleWorkspaceofCable-drivenParallelRobotsByAddingSprings[J].MechanismandMachineTheory, 2015, 86:201-210.
[7]TaghaviA,BehzadipourS,KhalilinasabN,etal.WorkspaceImprovementofTwo-linkCable-drivenMechanismswithSpringCable[M].Springer:Cable-drivenParallelRobots, 2013.
[8]Ebert-UphoffI,VoglewedeP.OntheConnectionsBetweenCable-drivenRobots,ParallelManipulatorsandGrasping[C]//ProceedingsoftheRoboticsandAutomation.NewOrleans:2004IEEEInternationalConference, 2004:4521-4526.
[9]BosscherP,RiechelAT,Ebert-UphoffI.WrenchFeasibleWorkspaceGenerationforCable-drivenRobots[J].IEEETransactionsonRobotics, 2006, 22(5):890-902.
[10]BouchardS,GosselinC,MooreB.OntheAbilityofaCable-drivenRobottoGenerateaPrescribedSetofWrenches[J].JournalofMechanismsandRobotics, 2010, 2(1):011010.
[11]于勇,罗思标,郭希娟,等.基于Minkowski的多面体快速碰撞检测算法[J].小型微型计算机系统, 2012, 33(11):2543-2547.
YuYong,LuoSibiao,GuoXijuan,etal.CollisionDetectionMinkowskiSumPolyhedraRayIntersectionCalculation[J].JournalofChineseComputerSystems, 2012, 33(11):2543-2547.
[12]MaoY.Carex:aCable-drivenArmMExoskeletonforFunctionalTrainingofArmMovement[D].AnnArbor:UniversityofDelaware, 2012.
[13]PhamCB,YeoSH,YangG,etal.Force-closureWorkspaceAnalysisofCable-drivenParallelMechanisms[J].MechanismandMachineTheory, 2006, 41(1):53-69.
(编辑王艳丽)
Workspace Algorithm of Cable-driven Serial and Parallel Manipulators Based on Convex Set Theory
Dong Xiaodong1Duan Qingjuan1Ma Biao1Duan Xuechao2
1.Xidian University,Xi’an,710071 2.Key Laboratory of Electronic Equipment Structure of Ministry of Education,Xi’an,710071
In order to solve the wrench feasible workspace ofn-degrees-of-freedom serial and parallel manipulators driven bymcables, a non-iterative algorithm was proposed based on covex set theory. The properties of Minkowski Sum was introduced to construct the cable wrench set, and a non-iterative mathematical method was presented to verify if the wrench set fully included the external wrench set. Firstly, all boundary hyperplanes of convex set would be found by determining initial hyperplane. The projected boundary positions were determined according to the offset distance of the initial hyperplane. Then the explicit expression of the wrench equilibrium was deduced, and the wrench feasible workspace of cable-driven manipulator was obtained by using numerical analysis. The results demonstrate the effectiveness of the wrench feasible workspace analysis method based on convex set theory.
cable-driven manipulator; workspace; screw theory; covex set theory
2015-11-19
国家自然科学基金资助项目(51375360,51405362);陕西省自然科学基础研究计划资助项目(2016JM5034);留学回国人员科研启动基金资助项目
TP24
10.3969/j.issn.1004-132X.2016.18.002
董晓东,男,1991年生。西安电子科技大学机电工程学院硕士研究生。研究方向为索驱动机器人和机械结构优化设计方法。段清娟(通信作者),女,1971年生。西安电子科技大学机电工程学院副教授。马彪,男,1989年生。西安电子科技大学机电工程学院硕士研究生。段学超,男,1981年生。西安电子科技大学电子装备结构教育部重点实验室副教授。
