基于开口工艺要求的多臂机机构参数分析
2016-09-15季海彬周香琴成小军
季海彬,周香琴,成小军
(1. 浙江理工大学现代纺织装备重点实验室,杭州 310018;2. 万利纺织机械研究院,杭州 311243)
基于开口工艺要求的多臂机机构参数分析
季海彬1,周香琴1,成小军2
(1. 浙江理工大学现代纺织装备重点实验室,杭州 310018;2. 万利纺织机械研究院,杭州 311243)
为了探寻多臂机机构参数与开口工艺要求的关系,采用基本原理分析、机构运动学分析等方法,对法国Staubli公司的2658型多臂机的提综机构进行分析。研究结果表明:偏心盘控制单元应设计成无急回特性的曲柄摇杆机构,相邻综框对应的曲柄相位差应为180°,确保了综平位置和综平时刻的一致性,且综平时刻偏心方向与提综臂方向平行,但是上下开口极限动程无法一致,下开口极限动程大于上开口极限动程;综平时刻,综框调节机构的提综臂圆弧中心应在送杆和大刀片的铰接点;通过合理设计综框机架与大刀片中心的相对位置,可以确保上下开口动程的一致性;共轭凸轮旋转变速机构的引入增加了开口的静止时期,延长了纬纱通过梭口的时间。
开口机构;多臂机;工艺要求;机构参数
0 引 言
开口机构是织机的五大机构之一,运行速度快,载荷大,动力消耗多,需与打纬机构和引纬机构密切配合工作。开口机构是做上下往复运动的机构,当部分综框带动经纱往上运动时,另一部分综框带动经纱往下运动,形成由上下层经纱组成的梭口,以供纬纱从中穿过。开口机构具有多种类型,用以织造不同类型的织物,通常有曲柄连杆开口机构、凸轮开口机构、多臂开口机构和提花开口机构4种类型[1]。其中,多臂开口机构适用于织造较复杂的小花纹织物[1],被越来越多的织机厂家所使用。目前,Staubli公司生产的电子多臂机是行业领先产品,而国产多臂机的生产和研发仍处于仿制国外多臂机的阶段,产品的多样性、适应性、寿命和价格与国外相比还存在较大差距。
近些年,国内对多臂机的研究仍以运动学为主[2-3],多臂机机构参数与开口工艺要求之间的关系研究相对较少。开口机构要适应多品种和高速化生产,应具有结构简单、性能可靠、调节方便、运行平稳、梭口清晰、相邻两次综平位置和综平时刻一致等特点[4]。本文以法国Staubli公司的2658型多臂机为研究对象,从新型织机开口工艺要求入手,分析2658型多臂机各个机构参数,探寻机构参数与开口工艺参数之间的关系,为织机开口机构的设计和性能优化提供指导。
1 多臂机简介
图1是2658型多臂开口机构的三维模型。此多臂机是一个共轭凸轮旋转变速机构与相互并联的多组连杆机构的组合,如图2所示。其中编号5—14是一套多组并联的连杆机构(图中只画出了一组),都连接于O1轴。多臂机主轴通过一对1∶2的过渡齿轮减速,带动转盘1匀速转动。摇块3和3′与转盘铰接于O2和O2′点,与摇块铰接的转子与共轭凸轮啮合。共轭凸轮固定在机架上,相对机架静止不动。摇块一端有滑槽,它的运动通过滑槽中滑块带动O1轴和偏心盘做变速转动。由于O1轴在整周转动中有两次停歇,因此综框在极限位置处有了停顿时间。此处的偏心盘相当于开口曲柄,通过盘形连杆带动提综臂来回摆动,通过送杆8、大刀片9、连杆11、小刀片12、撑杆10及13带动综框上升或下降,实现开口运动。

图1 多臂开口机构模型
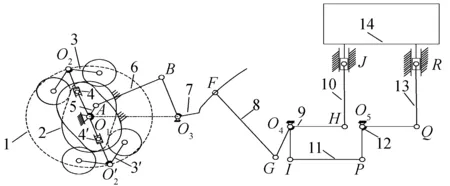
1-转盘 2-共轭凸轮 3’-摇块 4’-滑块 5-偏心盘 6-盘形连杆 7-提综臂 8-送杆 9-大刀片 11-连杆 12-小刀片 13-撑杆 14-综框图2 多臂机提综机构简图
2 工艺参数分析
普通开口运动规律如图3所示。为了使开口、引纬、打纬等各运动相互协调,达到最佳配合,要求每次开口过程中综平位置一致,综平时刻一致,上梭口动程与下梭口动程尽可能接近。由于复动式开口机构与单动式开口机构相比降低了一半的转速,因此现代织机多数采用复动式开口。但是复动式开口机构可能会出现连续两次综平不一致的情况,如图3中开口过程的第一次综平位置C和第二次综平位置D。因此,若综框运动规律曲线完全关于D点中心对称,且关于θ=180°或θ=540°轴对称,则该运动规律完全满足开口机构的要求。所以,综框运动规律应尽可能设计成完全对称。

图3 普通开口运动规律
3 机构参数分析
3.1偏心盘控制单元机构特征分析
偏心盘控制单元等效于曲柄摇杆机构,提综臂即为摇杆。当其转到左极限时,综框在最下端,当其转到右极限时,综框在最上端,两个时刻之间多臂主轴应该正好相差一周才能保证综平度一致,即曲柄转角相差180°。因此,具有无急回特性的曲柄摇杆机构恰好满足上述要求,其行程速度变化系数K=1。图4是无急回特性的曲柄摇杆机构简图,图中A1、O1、 A2、 B1、 B2在一条直线上。
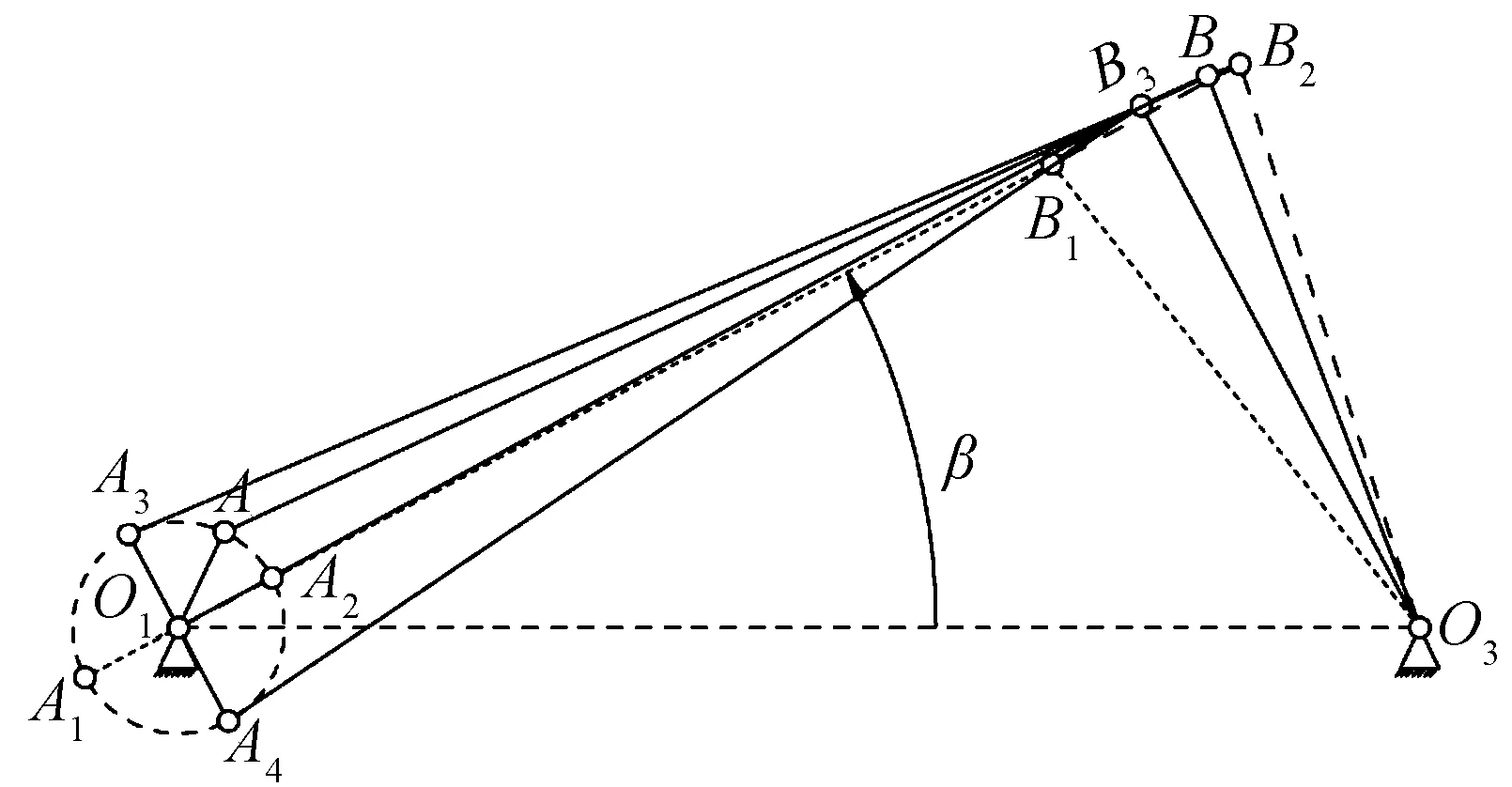
图4 无急回特性曲柄摇杆机构简图

(1)
求解式(1)可得:
(2)
a2+d2=b2+c2
(3)
因曲柄摇杆机构曲柄必为最短杆[5],所以要使式(3)成立,d必为4个数中的最大值,即机架为最长杆。
3.2偏心盘控制单元机构运动分析
为了得到理想的摇杆摆动曲线来适应开口运动的要求,需要对偏心盘控制单元机构进行研究。图5为曲柄摇杆机构运动分析矢量图。

图5 曲柄摇杆机构运动分析矢量图
设构件O1A、AB、O3B与O1O3方向的转角分别为θ1、θ2、θ3,列矢量方程式为:
(4)
投影到坐标轴上的方程式为:
(5)
消去θ2,解方程得:
Lsinθ3+Mcosθ3=N
(6)
其中:
(7)
3.3提综臂运动规律特征分析
3.3.1提综臂函数方程分析
已知偏心盘控制单元机构应设计成无急回特性的曲柄摇杆机构,则若相邻综框的连杆传动结构及参数完全相同,差别仅是物理结构上两曲柄相差180°角,则相邻综框的位移运动曲线完全相同,仅在相位上相差180°,即可确保综框运动曲线的两次交点相隔180°出现在同一高度,从而保证了综平时刻和综平位置的一致性。通过式(6)可以得出θ3关于θ1的函数,则形成开口运动的两提综臂的函数方程为:
(8)
其中:θ3∈(0,π)。
将式(6)代入式(8)得:


因此,可知综平时刻,提综臂与曲柄处于平行的位置,如图4、图6所示。
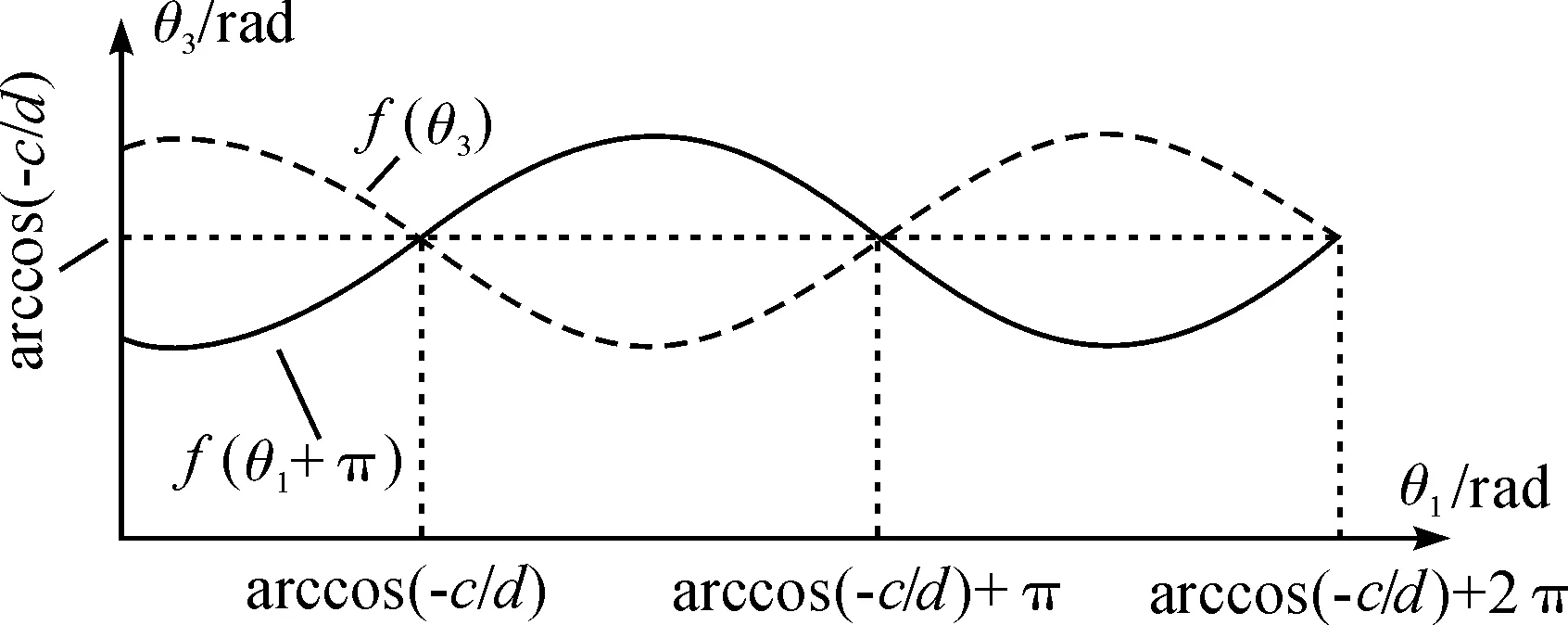
图和函数曲线
3.3.2综平时刻与极值时刻的主轴相位差
(10)
若要使式(10)等于π/2,则:
⟹b2+c2=d2
⟹a=0
(11)
因为a=0时机构不成立,所以综平时刻与极值时刻的主轴相位差不可能为90°。所以综框从一个极限位置运动到综平位置,再从综平位置运动到另一极限位置,两者转角不等。根据式(11)可知,a值越小,两者转角差越小。
3.3.3提综臂上下开口极限动程分析
已知第一次极限位置时,θ2=θ1=β,第二次极限位置时,θ2=β,θ1=π+β,根据式(5),分别可求出两次极限位置时θ3的大小为:
(12)
(13)
(14)

=θ3c-θ3a
(15)
所以:
Δ2-Δ1=2θ3c-(θ3a+θ3b)
(16)

因为b2-d2≤0,所以根据凹函数的性质得:
(17)
所以(θ3a+θ3b)∈[180°,360°]。

因为y=cosx在区间[180°,360°]为增函数,所以可以通过求cos(2θ3c)-cos(θ3a+θ3b)来判断式(16)的大小。
(18)

cos(θ3a+θ3b)=cosθ3acosθ3b-sinθ3asinθ3b

(19)
因为

(20)
所以:
(21)
所以:
cos(2θ3c)-cos(θ3a+θ3b)
(22)
所以Δ2-Δ1>0。
因此,下开口极限动程大于上开口极限动程,上下开口极限动程无法相等。根据式(22)可知,a/d的值越小,Δ2-Δ1的值也就越小。因此,若a值越小,d值越大,则上下开口极限动程差越小。
3.4综框调节机构的分析
现代织机为了能够适应不同织物的需求和方便形成清晰梭口,往往需要较便捷地改变织机开口动程的大小,因此需要具有综框动程调节机构,其简图如图7所示。设定织机开口机构在综平位置时,提综臂圆弧的圆心恰好在送杆和大刀片的铰接点G。则调节送杆F端在提综臂圆弧上的不同位置,大刀片9并不会摆动,因此综框的综平位置不变,而综框的动程大小随之变化。当F点往上调,提综臂O3F变大,综框动程随之变大;当F点往下调,提综臂O3F变小,综框动程随之变小。

图7 综框动程调节机构简图


图8 调节机构极限位置
该机构参数与织机结构布局及提综臂形状有关,同一型号的多臂,配不同织机时,其机构参数差异较大。
3.5综框与大刀片的相对位置分析

(23)


图9 综框机架与大刀片示意
3.6共轭凸轮旋转变速机构分析
凸轮旋转变速机构简图如图10所示,输入转角与输出转角函数关系如图11所示,综框运动规律如图12所示。若无共轭凸轮旋转变速机构,由转盘1直接带动O1轴做匀速圆周运动,则梭口在满开时综框无静止时间,不利于织机的宽幅化。因此,共轭凸轮旋转变速机构的引入就是使一个匀速旋转运动转变为设定的中间有两次停歇的变速旋转运动,从而使综框在极限位置处有了一段静止时间,其设计思路可由图11来表示。设定函数自变量为转盘1的转角φ,函数因变量为O1轴的转角θ1,其关系式可由θ1=g(φ)表示,且在一个周期内,自变量和因变量均增加360°。为了消除共轭凸轮旋转变速机构在运动过程中产生的不平衡现象,可以采用对称设计的方法,即在相位相差180°处安置一组相同的摇块,如图10所示。因此该机构在[0,180°]与[180°,360°]两个区间中,运动规律完全相同,所以综框上下开口过程中的静止时间完全相同。
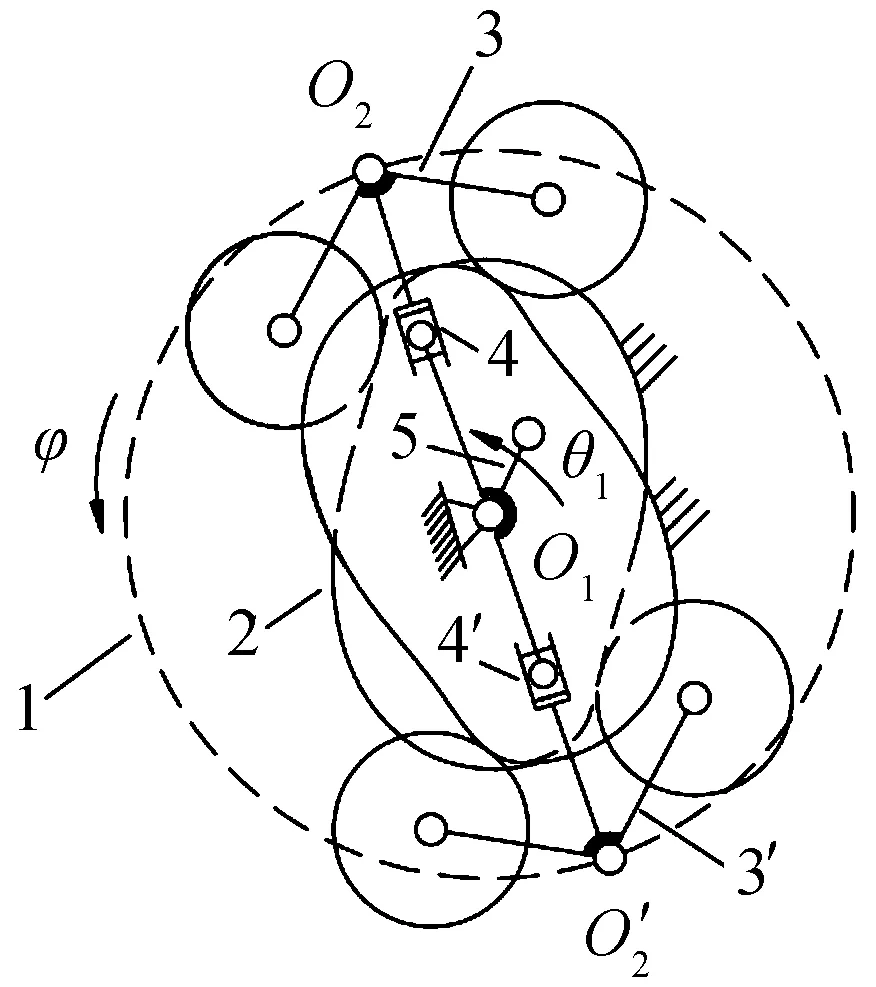
图10 凸轮旋转变速机构简图

图11 输入转角与输出转角函数关系
通过共轭凸轮旋转变速机构,综框运动在极限位置处有了停顿时间,增加了纬纱从梭口通过的时间,使图12中没有静止时间的综框运动规律变成图13中的理想运动规律。若要增加综框的静止时间,则只需在设计关系式θ1=g(φ)时增大静止区段。
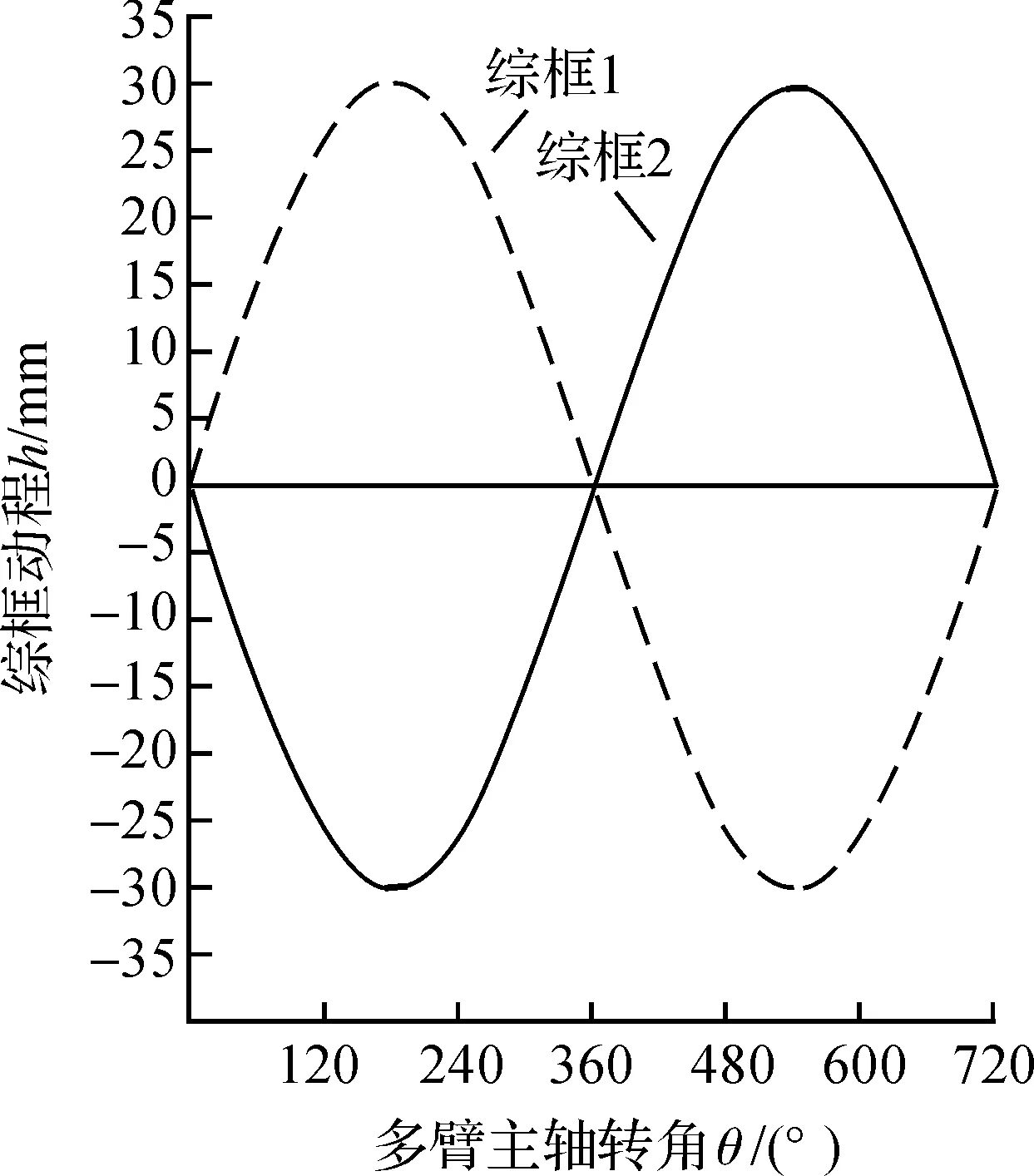
图12 无静止时期的综框运动曲线

图13 理想综框运动曲线
4 结 论
本文通过对织机开口工艺及Staubli公司的2658型多臂机的机构分析,得出了一些机构特征及运动规律特征:
a)偏心盘机构的无急回特性和相邻综框对应的曲柄相位相差180°,保证了开口运动的综平位置和综平时刻一致性。综框上下开口极限动程不一致,下开口极限动程要大于上开口极限动程。综框从一个极限位置运动到综平位置,再从综平位置运动到另一极限位置,两者转角不等。而综平时刻偏心盘的偏心方向与提综臂方向恰好平行。
b)综平时刻,综框动程调节机构的提综臂圆弧中心应尽量位于送杆与大刀片的铰接中心,以利于综框动程调节时,综平位置不变。综框动程调节机构的对称性有待进一步研究。
c)合理布置综框与大刀片转动中心的相对位置,可以获得上下开口动程的对称分布。
d)凸轮旋转变速机构的设计,增加了开口的静止时期。
上述结论可为国内自主设计开发多臂机和其他开口机构提供了理论基础和指导意义。
[1] 陈革.织造机械[M].2版.北京:中国纺织出版社,2009:74-90.
[2] 胡兵,张纯. 2861型电子多臂开口机构的运动学分析[J]. 设计与研究,2007,34(3):32-34.
[3] 沈毅,高大牛,刘春雷. 基于ADMAS的GT421型多臂机机构动态仿真[J]. 纺织学报,2012,33(8).119-123.
[4] 贾素会. 织机开口机构分析[J].河北纺织,2009(1):82-84.
[5] 苏有良.无急回特性曲柄摇杆机构新的解析设计法[J].轻工机械,2007,25(1):60-62.
[6] 何敏英,王其慧,华大年. 怎样消除平综时间差异的探讨[J].华东纺织工学院学报,1982(3):91-96.
[7] 马顺彬,瞿建新. 新型织机开口机构的发展[J].上海纺织科技,2009,37(10):21-23.
[8] 胡希篯,华大年. 四连杆开口机构两次综平度一致的数学分析[J]. 丝绸,1981(3):26-27.
[9] 沈毅,刘春雷,高大牛,等.共轭凸轮-滑块摇杆组合机构的设计与应用[J]. 机械设计与研究,2012,28(4).22-25.
[10] 胡浙科,周香琴. 基于Pro/E的开口机构惯性载荷特性研究[J]. 浙江理工大学学报, 2013,30(5):723-728.
(责任编辑: 康锋)
Analysis on Mechanism Parameters of Dobby Based on Requirement of Opening Process
JIHaibin1,ZHOUXiangqin1,CHENXiaojun2
(1.Zhejiang Key Laboratory of Textile Equipment, Zhejiang Sci-Tech University, Hangzhou 310018, China; 2.Wanli Textile Machinery Research Institute, Hangzhou 311243,China)
In order to explore the relationship between dobby mechanism parameters and the opening process requirements, kinematics analysis and other methods were used to analyze the heald lifting mechanism of French Staubli Company’s type 2658 dobby. The research result shows that the eccentric disc control unit should be designed to be the crank rocker mechanism without quick-return characteristic and the crank phase difference corresponding to adjacent heald frames shall be 180°,which ensures the consistency between flat heald position and flat heald moment, and at the moment of flat heald, the eccentric direction parallels lifting heald arm. But the limit strokes of upper and lower openings cannot be consistent, the lower limit stroke is bigger than the upper one. At the moment of flat heald, the arc center of lifting heald arm of heald frame regulating mechanism should at the hinged point between feed bar and big blade. Properly designing the relative position between heald frame rack and the center of big blade can ensure the consistency between the strokes of upper and lower openings. The introduction of conjugate cam rotating variable speed mechanism increases the rest period of opening, and prolongs the time of weft yarns going through the shed.
opening mechanism; dobby; requirement of process; mechanism parameter
10.3969/j.issn.1673-3851.2016.03.009
2015-05-14
浙江省重大科技专项项目(2013C01027)
季海彬(1989-),男,浙江诸暨人,硕士研究生,主要从事织机机械机构学方面的研究。
周香琴,E-mail:zhouxiangqin@zstu.edu.cn
TH112.1
A
1673- 3851 (2016) 02- 0205- 06 引用页码: 030402
