新型欧拉屈曲梁非线性动力吸振器的实现及抑振特性研究
2016-08-04刘海平杨建中罗文波钱志英
刘海平, 杨建中, 罗文波, 钱志英
(北京空间飞行器总体设计部,北京 100094)
新型欧拉屈曲梁非线性动力吸振器的实现及抑振特性研究
刘海平, 杨建中, 罗文波, 钱志英
(北京空间飞行器总体设计部,北京100094)
将欧拉屈曲梁和线性弹簧并联使用,构建非线性动力吸振器。建立了安装欧拉屈曲梁非线性动力吸振器的系统动力学模型。利用谐波平衡法推导了主从振系的频响方程组。利用四阶龙格-库塔法对比计算了在瞬态激励和多频稳态激励条件下,未安装吸振器、安装线性和非线性吸振器时主振系在时间域和频率域的响应特性。在此基础上,开展欧拉屈曲梁的初始挠度、初始倾角和阻尼系数对其振动抑制性能的影响分析。结果表明:所提欧拉屈曲梁设计参数成功构建了非线性动力吸振器;与安装线性吸振器前后的主振系响应相比,对主振系的抑振效果明显;欧拉屈曲梁初始挠度和阻尼系数存在最优值;初始倾角增大可增强非线性动力吸振器的振动抑制能力。
非线性; 动力吸振器; 欧拉屈曲梁
动力吸振器的概念最早由Frahm[1]提出,经过多年的发展被广泛推广应用于各个工程领域。然而,传统线性动力吸振器的适用频带较窄,仅能实现单频振动控制。在吸振器受到冲击载荷、随机振动等宽频振动激励时,其有效性非常有限。
在线性动力吸振器基础上,Roberson[2]提出在动力吸振器中引入非线性,可以有效增加振动抑制的带宽,并提高其鲁棒性。国内外学者对非线性动力吸振器的工作机理和影响因素开展了大量研究工作[3-10]。但是,以上研究工作仅将非线性动力吸振器简化为“立方刚度弹簧-阻尼-质量”系统,并未给出其具体的工程实现形式。
近年,一类基于欧拉屈曲梁的高静低动准零刚度隔振器引起国内外学者的关注[11-14]。此类隔振器采用正负刚度并联的原理获得超低频隔振性能。为了有效表征隔振器的非线性力学特征,引入立方刚度非线性项。这一非线性特征奠定了欧拉屈曲梁构建新型非线性动力吸振器的力学基础。
本文使用欧拉屈曲梁构建新型非线性动力吸振器,并对其振动抑制特性进行了研究。通过建立相应的动力学方程,利用谐波平衡法获得了系统的频响函数。采用数值计算方法,对欧拉屈曲梁构建的非线性动力吸振器的有效性,以及安装线性动力吸振器前后主振系的响应特性进行对比研究。在此基础上,通过参数化计算,分析了欧拉屈曲梁重要设计参数对抑振特性的影响。以上工作为新型非线性动力吸振器的工程应用奠定了基础。
1非线性动力吸振器模型
McFarland[15]给出了本质非线性动力吸振器的简化模型,其主要特征为两个线性刚度弹簧沿水平方向与一个质量块连接,弹簧两侧连接端带有滑套,可防止弹簧弯曲产生扭转。楼京俊等[8]引入一个弱线性刚度弹簧作为支撑,有效改善了本质非线性动力吸振器的振动控制性能。
根据以上方法,利用欧拉屈曲梁构建的非线性动力吸振器,如图1所示。其中,单根欧拉屈曲梁模型在图2中给出。

图1 欧拉屈曲梁非线性动力吸振器Fig.1 The structure of Euler buckled beam nonlinear vibration absorber

图2 单根屈曲欧拉梁Fig.2 Schematic of a single euler buckled beam
假设在初始状态下,单根欧拉屈曲梁中间初始挠度q0,在垂向载荷P的作用下,其末端垂向位移为y,中间挠度为q。
轴向载荷P和末端垂向位移y之间的关系:
(1)
式中:Pe=EI(π/L)2,L为欧拉屈曲梁未变形时长度,E为材料弹性模量,I为曲梁截面惯性矩。
图3给出欧拉屈曲梁构建的本质非线性动力吸振器。根据单根屈曲欧拉梁的轴向力位移式(1),得到欧拉屈曲梁构建的本质非线性动力吸振器的垂向力位移关系:
(2)


图3 欧拉屈曲梁本质非线性动力吸振器Fig.3 The structure of Euler buckled beam essentially nonlinear vibration absorber
在欧拉屈曲梁构建的本质非线性动力吸振器质量块下增加支撑弹簧可改善其静动态性能,得到图1所示的非线性动力吸振器,假设质量块的平衡位置为欧拉屈曲梁水平时的位置,得到非线性吸振器沿z方向的弹性恢复力为:
(3)

2系统动力学模型
由线性系统和欧拉屈曲梁非线性动力吸振器构成的模型,如图4所示。其中,M为主振系质量,K为主振系弹性系数,C1为主振系阻尼系数;m为非线性动力吸振器质量,C2为相应阻尼系数;F(z)为欧拉屈曲梁非线性动力吸振器输出弹性恢复力,z=x-y为吸振器与主振系的相对位移;fcos(ωt)为系统输入激励。

图4 安装非线性动力吸振器系统模型Fig.4 The dynamic model with nonlinear vibration absorber
由图4所示模型,可以得到系统动力学方程:
(4)
其中,ξi为无量纲阻尼系数,μ为主从系统质量比,ε为主从系统的线性刚度比,A为力幅值作用下的主振系变形。
将以上关系式代入方程(4),得到:
(5)
令τ=ωt为新的时间量纲,得到:D/Dt=ωD/Dτ,D2/Dt2=ω2D2/Dτ2,Ω=ω/ωn为频率比,相对位移z=y-x。
将以上关系式代入方程(5),得到:
(6)
式中:(·)′=D(·)/Dτ,(·)″=D2(·)/Dτ2。
3系统近似解析计算
对方程(6)所示非线性微分方程采用谐波平衡法,将系统的周期解利用傅里叶级数展开,代入动力学方程,平衡各个谐波系数。
假设方程(6)的一阶谐波解为:
X=X0cosτ,Z=Z0cosτ
(7)
考虑阻尼的影响,激励A与主振系位移X,主振系位移X与相对位移Z之间相位差分别为θ、φ。将公式X=X0cos(τ+φ),Z=Z0cosτ代入方程(5)的第二式,得到:
Ω2X0cos(τ+φ)
(8)

Ω2X0cosφcosτ-Ω2X0sinφsinτ
(9)
省略高于一次的高次谐波,上式两端的一次谐波cosτ和sinτ的系数相等,得到:
消去上式中参数φ,得到频响方程:
(11)
将式(6)中第二式代入第一式,得到:
(1+μ)Ω2X″+2ξ1ΩX′+X+μΩ2Z″=Acos(τ)
(12)
考虑位移X和Z之间的相位差φ,将X=X0cosτ,Z=Z0cos(τ-φ)代入式(12),式中的Acos(τ)相应改写为Acos(τ+θ)展开三角函数,得到:
[(1+μ)Ω2X0+μΩ2Z0cosφ]cosτ+
(2ξ1ΩX0+μΩ2Z0sinφ)sinτ=
(X0-Acosθ)cosτ+Asinθsinτ
(13)
使式(13)两端的一次谐波cosτ和sinτ的系数相等,得到:
(14)
将式(10)代入式(14),并消去参数θ,得到第二个频响函数:
(15)
结合式(11)和式(15)得到各参数关系的非线性方程组:

4算例
利用以上所建系统动力学模型,采用龙格—库塔法对欧拉屈曲梁构建的非线性动力吸振器进行设计并评估其振动控制效果。同时,与安装线性动力吸振器前后系统的响应特性进行对比。
系统模型中线性部分设计参数参见文献[8],具体见表1。其中,线性动力吸振器设计参数为理论最优值。表中还给出可在工程中实现的任意一组欧拉屈曲梁非线性动力吸振器的设计参数。
4.1瞬态响应
利用所建模型,考虑动力吸振器对主振系瞬态响应特性的影响,给主振系质量施加幅值为0.02 m的初始位移激励,其他变量初始条件均为0,设计参数详见表1。
图5给出0.02 m初始位移激励下,未安装动力吸振器、安装线性和非线性动力吸振器时主振系位移响应曲线。由图可见,未安装动力吸振器时,由于系统中缺少耗能环节(阻尼C1=0 Ns/m)导致主振系保持幅值为0.02 m的稳态振动。安装线性和非线性动力吸振器以后,主振系的振动响应可在2 s内实现衰减。在0 s~2 s时间范围内安装非线性动力吸振器的主振系响应幅值显著小于安装线性动力吸振器的主振系响应。

图5 主振系瞬态响应曲线Fig.5 Transient responses of the main mass

参数符号数值备注质量M100kg弹性系数K3.95×105N/m阻尼C10Ns/m主振系吸振器质量m8kg弹性系数k02.71×104N/m阻尼C050Ns/m线性吸振器(最优值)未变形长度L0.02m中间初始挠度q01×10-3m材料弹性模量E89GPa(铍青铜)截面厚度h2×10-4m截面宽度w1×10-2m初始倾角θ10°阻尼C2200Ns/m欧拉屈曲梁
利用主振系在计算时间内位移响应均方根值对比安装线性和非线性吸振器前后的抑振效果,如图6所示。可见,线性和非线性吸振器可分别使主振系响应衰减80.77%和81.76%。

图6 主振系瞬态位移响应均方根RMSFig.6 RMS value of the main mass displacement for transient responses
通过傅里叶变换得到主振系在频率域的响应曲线,如图7所示。可见,在主振系峰值频率处线性吸振器的抑振效果优于非线性吸振器;但是,非线性吸振器有效工作频带更宽,并将线性吸振器附带产生的两个共振峰有效抑制。显然,这一现象与已有关于本质非线性动力吸振器的研究结果相符。由此得到,基于欧拉屈曲梁成功构建了一类新型非线性动力吸振器。
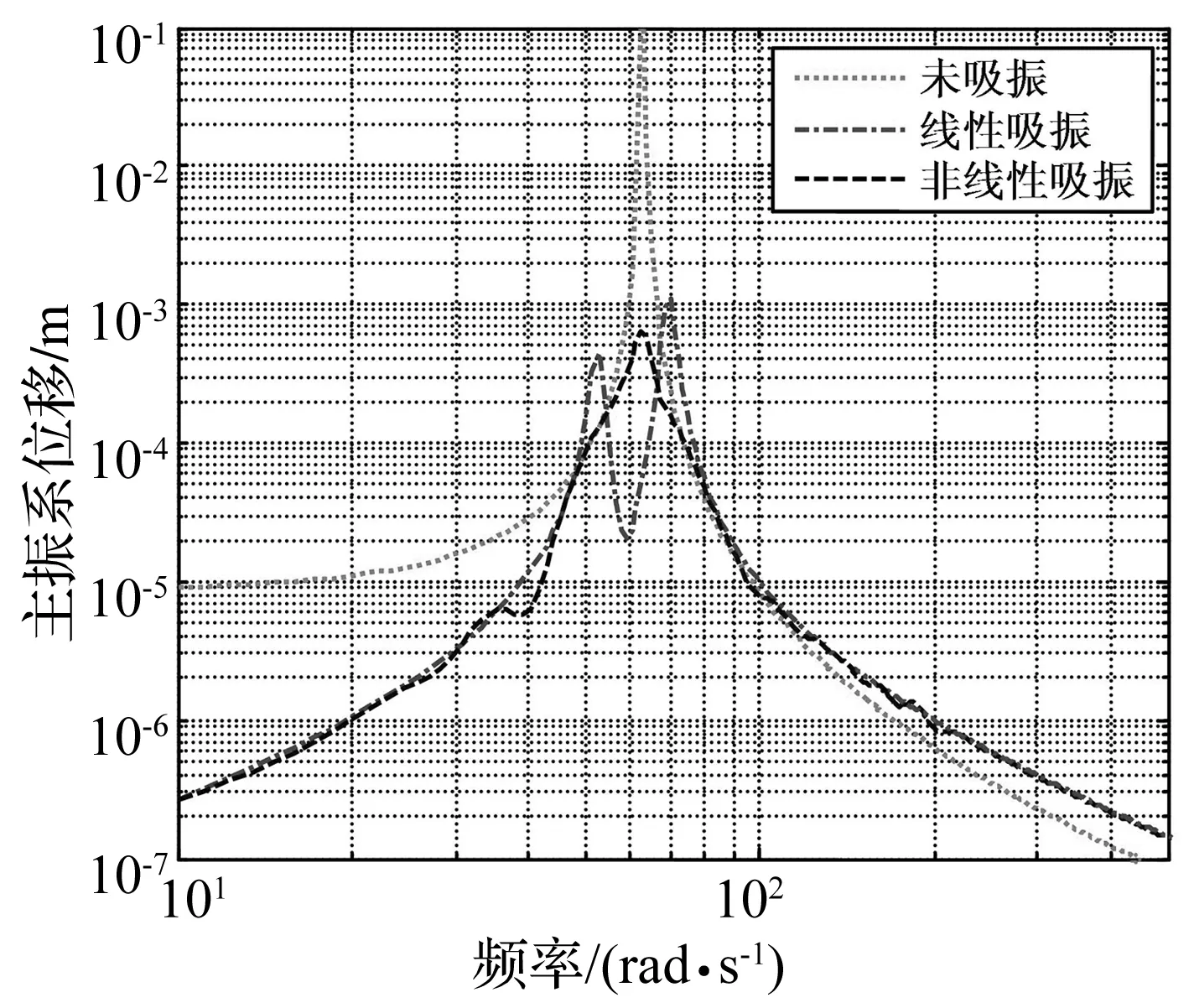
图7 主振系瞬态响应曲线Fig.7 Transient responses of the main mass
4.2稳态响应
工程实际中,系统除受到瞬态激励之外,还会受到多个频率的稳态载荷作用。为了研究在稳态载荷作用下吸振器对系统动态特性的影响,给主振系施加三个频率激励,力幅值f=395 N,激励频率ω1=52 rad/s,ω2=63 rad/s,ω3=71 rad/s,变量初始条件均为0。
图8给出三个频率稳态激励下,主振系在时间域的位移响应曲线。可见,稳态激励作用下,使无阻尼主振系的振动响应幅值趋于无穷大;安装线性和非线性吸振器均可有效抑制其位移响应。

图8 主振系稳态响应曲线Fig.8 Stability responses of the main mass
利用主振系位移响应均方根值对比安装不同吸振器前后的抑振效果,如图9所示。可见,线性和非线性吸振器可分别使主振系响应衰减93.06%和93.88%。
图10给出频率域位移响应曲线,可见线性吸振器在激励频率ω2=63 rad/s附近抑振性能优于非线性吸振器,其他频段抑振效果均不如非线性吸振器。
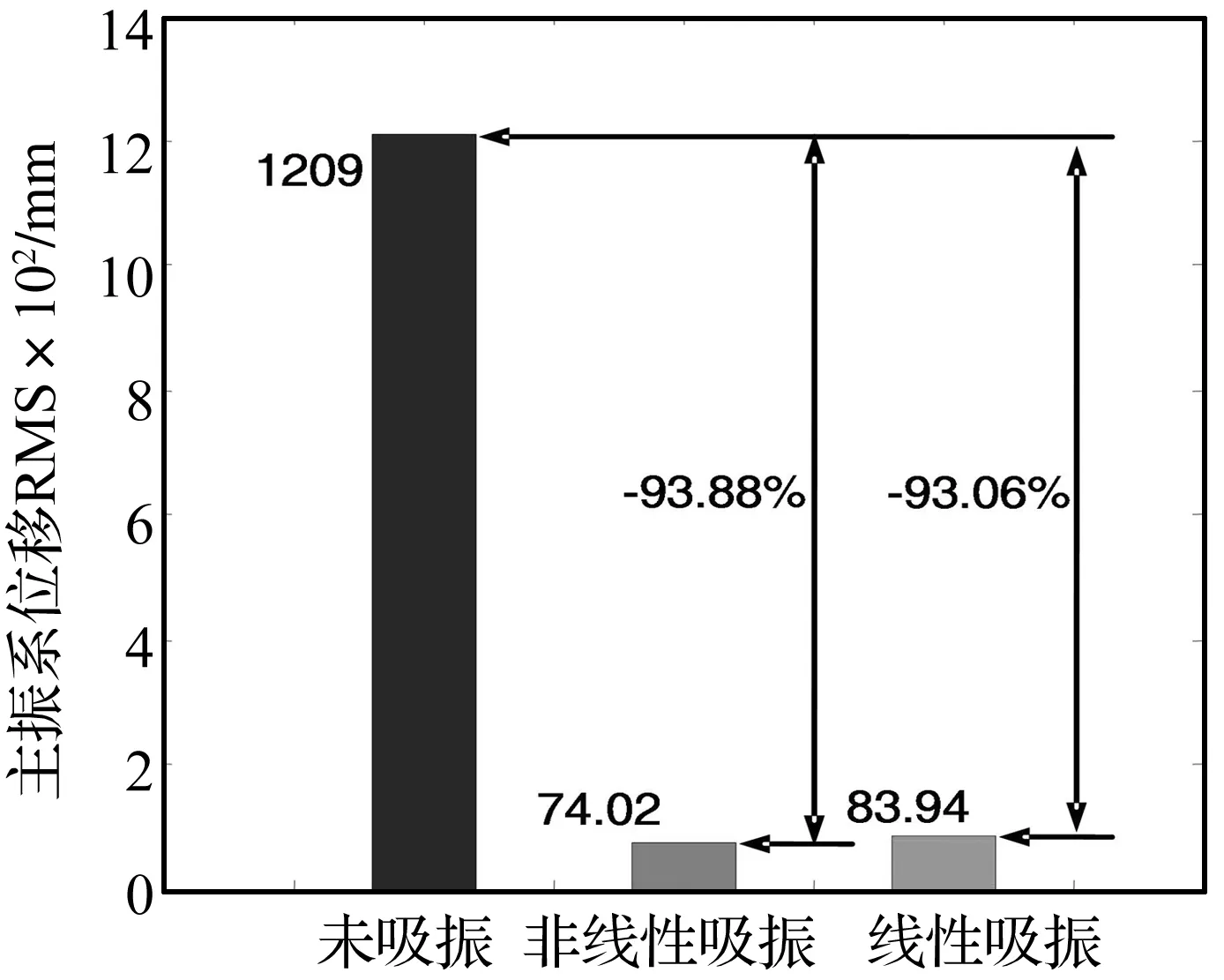
图9 主振系稳态位移响应均方根RMSFig.9 RMS value of the main mass displacement for stability responses
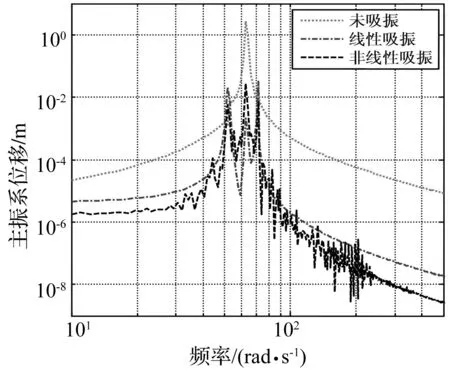
图10 主振系稳态响应曲线Fig.10 Stability responses of the main mass
4.3欧拉屈曲梁影响因素分析
欧拉屈曲梁初始挠度、初始倾角和阻尼系数是影响其动态特性的重要参数,因此根据以上所建系统动力学模型进行分析研究。
首先,欧拉屈曲梁其他设计参数保持不变,分别取初始挠度q0=1×10-5m,1×10-4m,1×10-3m,1×10-2m, 1×10-1m,得到主振系位移响应均方根值,如图11所示。可见,初始挠度存在最优值,所取参数太大或者太小均不能使非线性动力吸振器动态性能最优,即q0=1×10-3m时抑振效果最好,可使主振系位移响应幅值最小为74.02 mm。
图12给出仅考虑欧拉屈曲梁初始倾角变化时的抑振效果。分别取θ=5°,10°,15°,20°,25°,主振系位移均方根随着初始倾角的增大而增加,依次为58.77 mm,74.02 mm,105.2 mm,131.6 mm,147.3 mm,所以在使用时应选择尽可能小的倾角。但倾角的选择也应在一定范围内,否则欧拉屈曲梁的力学关系式(1)将不再适用。

图11 不同初始挠度对应主振系稳态响应均方根Fig.11 RMS value of the main mass displacement for stability responses for different values of q0

图12 不同初始倾角对应主振系稳态响应均方根Fig.12 RMS value of the main mass displacement for stability responses for different values of θ
阻尼系数作为振动控制系统的耗能环节,其设计参数的选择对于系统的振动抑制效果影响较大。因此,保持其他设计参数不变,考虑欧拉屈曲梁吸振器阻尼系数分别为C2=0,20,200,2 000,20 000 Ns/m,得到主振系位移响应均方根,如图13所示。可见,阻尼系数也存在最优值,太大或者太小均不能实现最佳的抑振效果。阻尼系数为C2=200 Ns/m时,可使主振系位移响应均方根最小为74.02 mm。
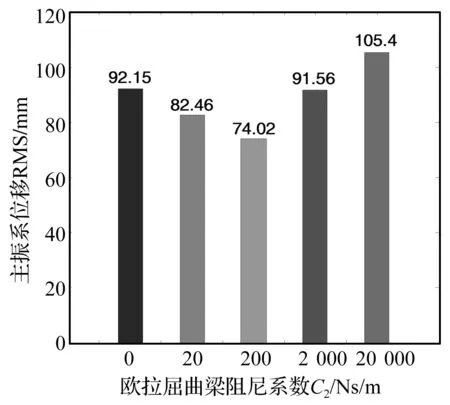
图13 不同阻尼系数对应主振系稳态响应均方根Fig.13 RMS value of the main mass displacement for stability responses for different values of C2
5结论
根据非线性动力吸振器的设计原理,提出一种可在工程中实现的基于欧拉屈曲梁的非线性动力吸振器,并建立其系统动力学方程。
首先,采用谐波平衡法得到所建力学方程的近似解析解。然后,使用龙格-库塔法计算得到安装线性和非线性吸振器前后,主振系在瞬态位移激励和多频稳态正弦激励下在时间域和频率域的响应特性曲线。最后,考虑欧拉屈曲梁重要设计参数初始挠度、初始倾角和阻尼系数的影响,进行了仿真计算。
根据计算结果得到如下结论:
(1) 提出可在工程中实现的新型欧拉屈曲梁非线性动力吸振器几何设计参数,并建立其动力学方程;
(2) 与线性吸振器相比,非线性吸振器在有效抑制主频振动响应的同时,在其他频段不会引起响应峰,并且其有效抑振频带更宽;
(3) 欧拉屈曲梁初始挠度存在最优值为q0=1×10-3m,可使主振系位移响应均方根值最小为74.02 mm;
(4) 主振系响应幅值随着欧拉屈曲梁初始倾角的增大而增加;所以在使用时应选择尽可能小的倾角。但倾角的选择不应太小,而是在一定范围内,否则欧拉屈曲梁的力学关系式(1)将不再适用;
(5) 欧拉屈曲梁的阻尼系数存在可使主振系响应均方根最小的最优值为C2=200 Ns/m,其取值不应该太小或者太大。
通过本文研究工作,可为基于欧拉屈曲梁的新型非线性吸振器的设计及工程实施奠定基础。
[ 1 ] Frahm H. Device for damping vibration of bodies[P]. US Patent, 1909: 989958.
[ 2 ] Roberson R E. Synthesis of a nonlinear dynamic vibration absorber[J]. Journal of the Franklin Institute, 1952,254(3): 205-220.
[ 3 ] Oueini S S, Chin C M, Nayfeh A H. Dynamics of a cubic nonlinear vibration absorber[J]. Nonlinear Dynamics, 1999, 20(3): 283-295.
[ 4 ] Pun D, Liu Y B. On the design of the piecewise linear vibration absorber[J]. Nonlinear Dynamics, 2000, 22(4): 393-413.
[ 5 ] Walsh P L, Lamancusa J S. A variable stiffness vibration absorber for minimization of transient vibrations[J]. Journal of Sound and Vibration, 1992, 158(2): 195-211.
[ 6 ] Starosvetsky Y, Gendelman O V. Vibration absorption in systems with a nonlinear energy sink: nonlinear damping[J]. Journal of Sound and Vibration, 2009, 324(3/4/5): 916-939.
[ 7 ] Zhu S J, Zheng Y F, Fu Y M. Analysis of nonlinear dynamics of a two-degree-of-freedom vibration system with nonlinear damping and nonlinear spring[J]. Journal of Sound and Vibration, 2004, 271(1/2): 1-11.
[ 8 ] 楼京俊, 唐斯密, 朱石坚,等. 改进的本质非线性吸振器宽频吸振参数域研究[J]. 振动与冲击, 2011, 30(6): 218-222.
LOU Jing-jun, TANG Si-mi, ZHU Shi-jian, et al. Parametric range of improved essentially nonlinear absorber on broad frequency band[J]. Journal of Vibration and Shock, 2011, 30(6): 218-222.
[ 9 ] 赵艳影, 徐鉴. 时滞非线性动力吸振器的减振机理[J]. 力学学报, 2008, 40(1): 98-105.
ZHAO Yan-ying, XU Jian. Mechanical analysis of delayed nonlinear vibration absorber[J]. Chinese Journal of Theoretical and Applied Mechanics, 2008, 40(1): 98-105.
[10] 唐斯密, 朱石坚, 楼京俊. 非线性吸振器刚度调整策略研究[J]. 武汉理工大学学报, 2011, 35(1): 163-171.
TANG Si-mi, ZHU Shi-jian, LOU Jing-jun. Study on the tactic of adjusting stiffness of the nonlinear dynamic vibration absorber[J]. Journal of Wuhan University of Technology, 2011, 35(1): 163-171.
[11] 刘兴天, 黄修长, 张志谊,等. 激励幅值及载荷对准零刚度隔振器特性的研究[J]. 机械工程学报, 2013, 49(6): 89-94.
LIU Xing-tian, HUANG Xiu-chang, ZHANG Zhi-yi,et al. Influence of excitation amplitude and load on the characteristics of quasi-zero stiffness isolator[J]. Journal of Mechanical Engineering, 2013, 49(6): 89-94.
[12] 张建卓, 李旦, 董申,等. 欧拉压杆在超低频垂向隔振系统中的应用研究[J]. 机械强度, 2004, 26(3): 237-241.
ZHANG Jian-zhuo, LI Dan, DONG Shen, et al. Study on Euler column spring used in ultra-low frequency vertical vibration isolation system[J]. Journal of Mechanical Strength, 2004, 26(3): 237-241.
[13] Winterflood J, Blair D G, Slagmolen B. High performance vibration isolation using springs in Euler column buckling mode[J] Physics Letters A, 2002, 300: 122-130.
[14] 殷小涛, 孟再强, 刘兴星,等. 非规则弹性片高静低动的隔振特性[J]. 噪声与振动控制, 2013, 33(6): 45-48.
YIN Xiao-tao, MENG Zai-qiang, LIU Xing-xing, et al. High static stiffness and low dynamic stiffness isolation characteristics of irregular elastic sheets[J]. Sound and Vibration Control, 2013, 33(6): 45-48.
[15] McFarland D M, Bergman L A, Vakakis A F. Experimental study of non-linear energy pumping occurring at a single fast frequency[J].International Journal of Non-linear Mechanics, 2005, 40:891-899.
Realization and vibration supperession ability of a new novel Euler buckled beam nonlinear vibration absorber
LIU Hai-ping, YANG Jian-zhong, LUO Wen-bo, QIAN Zhi-ying
(Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)
Combining an Euler buckled beam and a linear positive stiffness spring in parallel, a new novel improved nonlinear vibration absorber was designed and built. According to its structure, a systematic dynamic model with strong nonlinear characteristics of a structure system with the new novel absorber installed was established. Based on the nonlinear dynamic equations, the system’s frequency response equations were derived using the harmonic balance method. Meanwhile, under conditions of transient input and multi-frequency steady input, the system’s dynamic equations without any absorber, with a linear absorber and a nonlinear absorber, respectively were solved using the four-order Runge-Kutta method in time-domain and frequency-domain. In addition, the influences of initial deflection, oblique angle and damping coefficient of Euler buckled beam on the system’s vibration suppression performance were studied. The calculating results showed that a typical nonlinear dynamic absorber was constructed successfully based on the provided design parameters of Euler buckled beam; comparing the vibration responses of the main mass without any absorber and those with the nonlinear absorber, the nonlinear absorber has a better vibration-attenuation performance; the initial deflection and damping coefficient of Euler buckled beam have the optimal values; with increase in the initial oblique angle, the vibration supperession ability of the nonlinear vibration absorber is improved.
nonlinear; dynamic absorber; Euler buckled beam
10.13465/j.cnki.jvs.2016.11.024
国家自然科学基金资助项目(51405014)
2015-04-07修改稿收到日期:2015-06-02
刘海平 男,博士,工程师,1982年11月生
杨建中 男,硕士,研究员,1969年8月生
E-mail:lhpvibration@163.com
TG156
A
