基于遗传优化算法的柔性机械臂抑振轨迹规划研究
2016-08-04娄军强魏燕定李国平杨依领彭文飞
娄军强, 魏燕定, 李国平, 杨依领, 彭文飞
(1.宁波大学 机械工程与力学学院,浙江 宁波 315211;2.浙江省零件轧制成形技术研究重点实验室, 浙江 宁波 315211; 3.浙江大学 现代制造工程研究所, 杭州 310027)
基于遗传优化算法的柔性机械臂抑振轨迹规划研究
娄军强1, 2, 魏燕定3, 李国平1, 2, 杨依领3, 彭文飞1, 2
(1.宁波大学 机械工程与力学学院,浙江宁波315211;2.浙江省零件轧制成形技术研究重点实验室, 浙江宁波315211; 3.浙江大学 现代制造工程研究所, 杭州310027)
为了抑制柔性臂的弹性振动,提出一种结合遗传优化算法和多项式函数插值的抑振轨迹规划方法。基于假设模态法和Hamilton原理建立了柔性臂系统的动力学方程,揭示了抑振轨迹规划原理。在轨迹优化过程中,采用五次多项式函数构造运动轨迹控制点的基础位移值,以轨迹控制点的位移浮动值作为待优化变量,在满足初始和终止位置运动状态约束的前提下,基于遗传算法优化得到柔性臂振动能量最小的最优抑振轨迹。数值计算和实验结果验证了抑振轨迹规划方法的有效性。实验结果表明:与跟踪常规的五次多项式运动轨迹相比,柔性臂在跟踪最优抑振轨迹时的残余振动最大振幅减小了10倍左右,其衰减时间由12 s缩短为4.5 s,提高了柔性臂系统的定位控制精度,改善了系统的操作效率。
柔性机械臂;轨迹规划;振动抑制;遗传算法
近年来,柔性机械臂在工业机械及航空航天领域得到了广泛应用[1]。与传统的刚性机械臂相比,柔性臂具有质量轻、能耗低及载荷/自重比高等一系列优点,但是结构柔性使柔性臂在执行操作任务和运动过程中极易激起自身低频、大幅度的弹性振动,并持续很长时间,导致整个柔性臂系统的定位精度和操作效率下降,严重时甚至导致系统失稳或破坏。因此对柔性臂振动抑制技术的研究是目前机器人控制领域中极其重要而又十分活跃的研究课题[2]。
目前柔性臂振动控制技术从广义上分为两类:反馈和前馈控制技术[3]:反馈控制技术借助于驱动电机或其它作动器利用检测到的振动信息对柔性臂的弹性振动进行抑制[4]。这种方法对外界干扰和系统参数变化具有很好的适应能力,但是在一定程度上也增加了控制系统的成本和难度,并可能对系统稳定性带来不利影响;另一方面,前馈控制技术既不需要测量柔性臂的弹性振动信息,也不需要借助于其它作动器就可以实现柔性臂的振动抑制。与反馈控制相比,基于前馈控制的振动抑制技术更加简单方便、经济实用。利用轨迹规划方法来抑制柔性臂的弹性振动就是一种前馈控制技术。其实质是通过对柔性臂运动时间历程内的状态信息(位移、速度及加速度)进行合理规划,来达到尽量避免激起柔性臂弹性振动的目的。Park等[5]釆用爬山搜索算法,设计了一条用傅里叶级数和多形式混合描述的最优抑振轨迹。Akira[6]采用B样条曲线插值,研究了在固定时间历程下沿着给定轨迹运行的柔性臂最小残存能量的轨迹规划方法。Korayem等[7]利用庞特瑞根原理构造了一类两个边界值约束的最优问题模型,解决了柔性臂系统在点到点控制中的最优抑振轨迹的求解。目前国内从事柔性臂抑振轨迹规划的研究还不是很多,吴立成等[8]根据空间柔性机器人处于失重条件的特性,提出了一个可以直接由运动轨迹简单计算得到的“激振力”性能指标,对双杆刚柔机械臂的运动轨迹进行规划。邵君奕[9]以柔性臂振动幅度的牵连作用力为优化指标,在满足系统复杂工作约束的同时,减少了柔性机器人末端的弹性振动。徐文福等[10]提出基函数叠加与粒子群优化(PSO)算法相结合的抑振轨迹规划方法,并从数值仿真的角度验证了其有效性。但是目前的研究大多仍处于理论分析和数值仿真阶段,如何结合实际提出一种计算简单、操作方便、并具有较好的实际抑振效果的轨迹规划方法,实际应用中还需进行深入研究。
1系统建模
为简化起见,研究中以典型的单连杆柔性机械臂为例,其结构简图见图1。图中柔性臂根部通过轮毂与驱动关节输出轴相连,xooyo为惯性坐标系,xoy为固联在柔性臂根部的浮动坐标系,τ(t)为轮毂处的驱动力矩,θ(t)为轮毂带动柔性臂转过的角位移,ρ,A,E,I,l分别为柔性臂的密度、横截面积、弹性模量、惯性矩以及长度。从图中可以看出柔性臂的转动和弹性振动都限制在水平面内,故可以忽略重力的影响,将柔性臂视为简单的欧拉—伯努利梁模型。

图1 单连杆柔性机械臂结构简图Fig.1 Schematic diagram of the single-link flexible manipulator
距离柔性臂根部O点x处任意一点P的位置向量p可以表示为
(1)
式中:w(x,t)为P点的横向弹性变形,r为轮毂半径。
许多研究者都采用假设模态法来研究旋转柔性机械臂的非线性动力学特性[11],且柔性臂的动力学特性主要取决于前几阶低频振动模态。基于假设模态法,柔性臂的弹性变形w(x,t)可以表示为
(2)
式中:m为保留的模态阶数;q(t)=(q1,q2, …,qm)T为广义模态坐标矢量;Ф (x)=(Ф1, Ф2, …, Фm)为模态振型矢量,而振型函数可由相应的边界条件确定。
根据广义Hamilton原理,经过推导、计算和整理后得到系统动力学方程如下
(3)
(4)
式中:各系数的具体表达式如下:
2基于遗传算法的抑振轨迹规划
2.1抑振轨迹规划原理
系统动力学方程式(3)代表了柔性臂的刚性运动,该式表明关节力矩在驱动柔性臂转动的同时,激起了柔性臂的弹性振动,整个柔性臂系统具有显著的刚柔耦合特性。而式(4)则反映了柔性臂弹性振动的动力学特性,考虑到柔性臂的阻尼效应,并假定其为比例阻尼,得到用于柔性臂抑振轨迹规划的动力学方程如下
(5)
式中:Cq为阻尼矩阵。
式(5)中的等号右边为柔性臂转动产生的惯性力矩,同时也是柔性臂振动动力学方程的外部作用力矩。从式(5)中可以看出:如果不考虑外部干扰,柔性臂的动力学响应是系统刚性运动产生的惯性力矩激励下的结果,且柔性臂在任意时刻的激振力矩与当前刚性部分的运动状态参数-转动角加速度有直接关系。因此在系统理想轨迹的运动参数可以精确实现的情况下,通过合理地规划系统的运动轨迹(位移、速度及加速度)参数,在满足系统运动状态约束的同时,利用刚性运动产生的激振力来抑制柔性臂在运动过程中的弹性振动,从而减少甚至消除柔性臂在系统运动停止后的残余振动。
2.2五次多项式轨迹曲线的描述与生成
柔性臂在执行操作任务时,仅需对其初始和终止位置的运动状态进行约束,完成点到点(Point to Point)的运动任务,而不需要考虑具体的运动轨迹路径。为了保证柔性臂的平稳运动,尽量减少冲击,描述机械臂运动轨迹的函数必须是连续的,且其一阶、二阶导数最好也是连续的[12]。目前常用于描述柔性臂轨迹的函数有多项式函数、样条曲线函数以及摆线函数等。五次多项式函数不仅具有形式简单、计算方便及容易满足系统对运动轨迹起始和终止位置约束的特点以外,还可以保证运动轨迹的一阶、二阶以及更高阶次的导数均是连续的,因此广泛用于柔性臂的运动轨迹控制中,故本节采用五次多项式函数作为柔性臂抑振轨迹规划的基础轨迹函数和插值函数。
为了实现柔性臂快速平稳地从初始位置运动到指定位置,需要对其运动轨迹的起始点和终止点的位移、速度及加速度进行约束。定义t0,tf分别为柔性臂运动的起始时刻和终止时刻;θ0,v0,a0为初始时刻的位置、速度及加速度;θf,vf,af为终止时刻的位置、速度及加速度。如果假定柔性臂初始处于静止状态,并指定系统在运动结束到达指定位置时的速度和加速度均为零,可以得到柔性臂运动的五次多项式轨迹曲线为
(θf-θ0)+θ0
(6)
如果选定五次多项式函数来描述柔性臂的运动轨迹,就可以通过给定区间内的离散角位移插值拟合出柔性臂的运动轨迹曲线,并且分段的五次多项式函数在插值点上具有四阶导数连续的特点。首先将柔性臂的运动轨迹在时间轴上等分为n个时间间隔,设定时间节点依次为t0,t1, …,tn,而对应的时间节点ti时刻柔性臂的角位移为θi。在边界条件也就是起始、终止点的位移、速度和加速度都已知的情况下,只需要确定起点、终点之间的n-1个插值点,也称为轨迹控制点,就可以唯一地获得一条通过五次多项式样条曲线插值得到的柔性臂运动轨迹曲线。同时为了提高优化效率,加快搜索速度,需要事先剔除一些由于速度、加速度变化幅度变化较大而明显不符合柔性臂运动轨迹要求的曲线,可以先通过一条基准轨迹曲线离散得到轨迹控制点的基础位移值,然后对基础值进行一些浮动变化,进而得到不同的轨迹控制点位移值,其具体表达式如下
(7)

2.3基于遗传算法的抑振轨迹规划实现
在进行柔性臂的抑振轨迹规划过程中,为了尽量减少柔性臂在运动过程中的弹性振动,使柔性臂在运动结束后的残余振动最小,提出如下目标函数
(8)
式中:Fit(t)为柔性臂弹性振动能量,式(8)第一项代表柔性臂在运动过程中的弹性振动能量,第二项为柔性臂运动结束后的残余振动能量,λ1和λ2为各自的权重系数。显然如果能够通过遗传算法找到一条使目标函数Fit(t)最小的运动轨迹,即可保证柔性臂在运动过程中及运动结束后的振动最小,从而通过轨迹规划来达到抑制柔性臂弹性振动的目的。



步骤4根据计算结果判断是否满足遗传算法终止条件,如果不满足则进行下一步操作,否则直接跳到步骤7;
步骤5根据每个个体的目标函数值,按照一定的概率进行选择、交叉和变异遗传算子操作,产生新的种群个体;
步骤6跳到步骤2,循环遗传算法的寻优过程;
步骤7输出目标函数最小的种群个体值,并根据遗传算法搜索得到的最优结果计算得到柔性臂的最优抑振轨迹。

图2 待优化轨迹的离散轨迹角度图(n=10)Fig.2 Discrete joint angles of the preparative optimization trajectory (n=10)
3数值计算
3.1基本参数设置
在数值计算中,柔性臂的基本参数如表1所示。由于实际柔性臂轨迹运动过程中的转速不高,常由驱动电机经减速器减速后驱动,因此驱动关节的刚度较大,柔性臂近似为悬臂梁的边界条件。在小弹性振动变形的假设条件下,柔性臂的一阶振动模态起到主导作用,故此处仅截取其一阶模态进行研究,通过数值解法求得其一阶固有频率为24.4 rad/s,并设定模态阻尼比为0.02。

表1 柔性臂的基本参数表
为了突出反映抑振轨迹规划方法对于柔性臂振动的抑制效果,计算中设计了一个要求柔性臂在较短时间内完成较长运动轨迹的工况,具体运动参数如下:初始位置θ0=0 rad,终止位置θf=π/2 rad,运动时间tf=0.5 s。为了缩短柔性臂的振动时间,提高系统操作效率,要求柔性臂在运动到指定位置后尽快停止振动,因此希望柔性臂在运动结束后的残余振动足够小,故在利用遗传算法搜索最优抑振轨迹的过程中,对柔性臂的残余振动能量给予更高的权重。设定系统的运动振动能量和残余振动能量的权重系数λ1和λ2分别为0.2和0.8。设置仿真时间为2 s,即考察在系统轨迹运动停止后的1.5 s内柔性臂的残余振动情况。

(i=1,2,…,n-1)
(9)
3.2优化结果及分析
图3给出了遗传算法的进化过程。从图中最佳适应度(Best Fitness)和平均适应度(Mean Fitness)的进化过程可以看出:随着进化代数增加,适应度值不断降低,大约经过30代进化过程收敛到最优解,即得到最优抑振轨迹控制点浮动值的最优值。

图3 遗传算法的进化过程Fig.3 Evolution history of the genetic algorithm
图4分别给出了柔性臂在跟踪五次多项式轨迹和最优抑振轨迹运动时的弹性振动情况。从图中所示的一阶模态位移曲线可以看出:通过对柔性臂的运动轨迹进行抑振轨迹优化,当柔性臂在预定的时间历程内到达指定位置后,其一阶模态残余振动与常规运动轨迹相比大幅度减少,并且其运动历程末期的弹性振动也得到了一定程度的抑制。显然通过对柔性臂的运动轨迹进行抑振轨迹优化大大减少了柔性臂的残余振动。

图4 柔性臂的一阶模态位移Fig.4 First modal displacement of the flexible manipulator
图5给出了基于遗传算法采用五次多项式插值生成的最优抑振轨迹。从图5(c)所示的加速度曲线中可以看出:虽然最优抑振轨迹增大了系统运动的最大加速度,但其加速度在运动历程的大部分时间内都小于同
时刻多项式轨迹的值,故在跟踪最优抑振轨迹时,系统刚性运动产生的激振力在整个时间历程内也相对较小,同时从其速度图5(b)中也可看出最优抑振轨迹的最大速度也明显小于多项式轨迹的值,故系统运行速度也更加平稳,因而激起的柔性臂弹性振动较小。
4实验验证
4.1实验系统方案
为了验证所提出的轨迹规划方法的有效性,检验优化得到的抑振轨迹的实际效果,本节开展了柔性臂轨迹跟踪运动实验研究,搭建了柔性臂系统实验平台见图6。实验中驱动关节由小惯量交流伺服电机(型号为YASKAWA SGMAH01A1A2S)和精密谐波减速器(型号为Harmonic Drive CSF-17-50-2A, 传动比为1∶50)组成,且伺服电机尾部内置绝对式光电编码器(16位)用于检测电机的位移和速度。柔性臂采用环氧树脂构件,并通过刚性轮毂与减速器输出端相连,其结构和几何参数与仿真数据相同。在柔性臂根部对称地贴有一对电阻应变片(电阻值120 Ω,灵敏度系数2.08)组成的桥接电路检测柔性臂的振动信息,桥路的输出信号经功率放大器(增益5 000)放大为-10~+10 V的电压信号,最后经数据采集卡(研华 PCI-1742U)输送到工控机中。

图5 最优抑振轨迹和五次多项式的结果比较Fig.5 Comparison between the optimal trajectory and quintic polynomial trajectory

图6 柔性臂系统实物图Fig.6 Photograph of the flexible manipulator system
图7给出了柔性臂系统在跟踪最优抑振轨迹时的振动情况。为了对比其抑振效果,图中还给出了柔性臂系统在跟踪五次多项式轨迹时的振动曲线。从应变

图7 不同跟踪轨迹下柔性臂的振动响应Fig.7 Vibration response of the manipulator tracking different trajectories
传感器的输出情况可以看出,柔性臂的弹性振动在跟踪最优抑振轨迹时得到了大幅度地衰减。
为了定量分析柔性臂在跟踪不同运动轨迹时的振动情况,表2进一步给出了柔性臂在轨迹运动过程中不同时刻的最大振幅(以应变传感器的输出电压表示)。从表中可以清晰地看出:在电机运动停止(t=0.5 s)后,柔性臂跟踪最优抑振轨迹时的最大应变输出电压为1.11 V;而当跟踪五次多项式轨迹时的最大应变输出电压处于饱和状态,超过10 V。当应变传感器的输出小于0.1 V时,柔性臂的弹性振动已经很小,可近似认为静止状态。表2反映出当系统跟踪最优抑振轨迹时,柔性臂的残余振动在电机运动停止后大约4.5 s衰减到静止状态;而当跟踪多项式轨迹时,达到同样的静止状态要持续12 s。显然柔性臂跟踪最优抑振轨迹时的弹性振动,尤其是其残余振动,得到了大幅度的衰减,其衰减时间显著缩短。
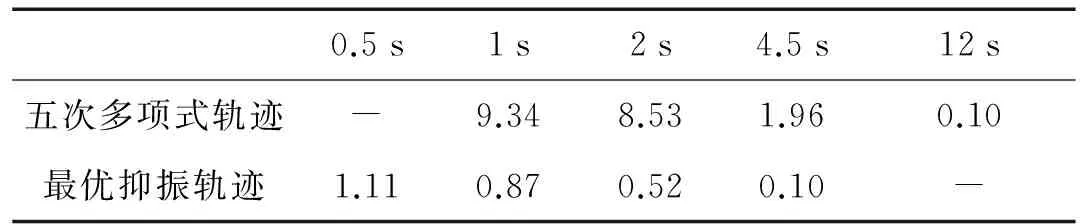
表2 跟踪不同轨迹时的最大振幅比对表(单位:V)
需要指出的是:与跟踪多项式轨迹相比,柔性臂在跟踪最优抑振轨迹时的残余振幅已经削减了很多,但其残余振动仍然存在,这点与数值计算结果并不一致。这是由于在数值计算的过程中并没有考虑伺服电机的驱动特性和减速器的传动特性,假定系统可以完美地完成轨迹运动任务,不存在轨迹跟踪误差。而实际中系统的轨迹跟踪误差是不可避免的,因此导致柔性臂的残余振动仍然存在。系统在跟踪最优轨迹时的实际位移、速度及加速度如图8所示。从图8所示的实验结果中可以看出:实验中系统运动的角位移和角速度曲线与数值计算结果基本吻合。而加速度曲线虽然变化趋势与数值计算结果相符,但是存在一定差异,这是由于图8(c)所示的加速度曲线是将实验中采集到的角速度信号进行微分运算得到的结果,电机实际运行速度存在一定的波动,而微分运算将其放大,造成实际加速度曲线与理想加速度曲线具有一定差异。

图8 系统跟踪最优抑振轨迹的运动信息Fig.8 Experimental results tracking the optimal trajectory
5结论
在揭示柔性臂系统抑振轨迹规划原理的基础上,提出了一种结合遗传优化算法和多项式函数插值的抑振轨迹规划方法。数值计算与实验结果证明了所提出的抑振轨迹规划方法的有效性和适用性。与跟踪常规的运动轨迹相比,实验中柔性臂在跟踪最优抑振轨迹时的残余振动最大振幅减小了10倍左右,其振动衰减时间由12 s缩短为4.5 s。因此证明了从关节电机运动轨迹规划的角度来实现柔性臂的振动抑制是切实可行的,为柔性构件的振动抑制技术提供了新的方法和有益尝试。
[ 1 ] 娄军强, 魏燕定, 杨依领, 等. 空间柔性机械臂弯扭耦合振动的主动控制研究[J]. 振动工程学报,2014,27(3): 400-407.
LOU Jun-qiang, WEI Yan-ding, YANG Yi-ling, et al. Active control of bending torsion coupled vibration of a space flexible manipulator[J]. Journal of Vibration Engineering, 2014,27(3):400-407.
[ 2 ] Choi S, Seong M, Ha S H. Accurate position control of a flexible arm using a piezoactuator associated with a hysteresis compensator[J]. Smart Materials and Structures,2013, 22 (0450094).
[ 3 ] Abe A. Trajectory planning for flexible Cartesian robot manipulator by using artificial neural network: numerical simulation and experimental verification[J]. Robotica,2011, 29(5): 797-804.
[ 4 ] Qiu Zhi-cheng, Wang Bin, Zhang Xian-min, et al. Direct adaptive fuzzy control of a translating piezoelectric flexible manipulator driven by a pneumatic rodless cylinder[J]. Mechanical Systems and Signal Processing,2013, 36(2): 290-316.
[ 5 ] Park K, Park Y. Fourier-based optimal-design of a flexible manipulator path to reduce residual vibration of the end-point[J]. Robotica,1993, 11(3): 263-272.
[ 6 ] Abe A. Trajectory planning for residual vibration suppression of a two-link rigid-flexible manipulator considering large deformation[J]. Mechanism and Machine Theory,2009, 44(9): 1627-1639.
[ 7 ] Korayem M H, Nikoobin A, Azimirad V. Trajectory optimization of flexible link manipulators in point to point motion[J]. Robotica,2009, 27:825-840.
[ 8 ] 吴立成, 孙富春, 孙增圻, 等. 柔性空间机器人振动抑制轨迹规划算法[J]. 机器人,2003(3): 250-254.
WU Li-cheng, SUN Fu-chun, SUN Zeng-qi, et al. Optimal trajectory planning of flexible space robot for vibration reducing[J]. Robot,2003(3): 250-254.
[ 9 ] 邵君奕,张传清,刘召,等. 考虑振动抑制的多冗余度特种操作机器人轨迹优化方法[J]. 机械工程学报,2012(1): 13-18.
SHAO Jun-yi, ZHANG Chuan-qing, LIU Zhao, et al. Trajectory optimization method of special operation redundant robot for vibration suppression[J]. Journal of Mechanical Engineering,2012(1):13-18.
[10] 徐文福,徐超,孟得山. 基于粒子群优化的刚柔混合机械臂振动抑制规划[J]. 控制与决策,2014(4): 632-638.
XU Wen-fu, XU Chao, MENG De-shan. Trajectory planning of vibration suppression for rigid flexible hybrid manipulator based on PSO algorithm[J]. Control and Decision,2014(4): 632-638.
[11] Chu Ming, Chen Gang, Jia Qing-xuan, et al. Simultaneous positioning and non-minimum phase vibration suppression of slewing flexible-link manipulator using only joint actuator[J]. Journal of Vibration and Control,2014, 20(10): 1488-1497.
[12] Springer K, Gattringer H, Staufer P. On time-optimal trajectory planning for a flexible link robot[J]. Journal of Systems and Control Engineering,2013, 227(10): 752-763.
[13] 巩敦卫. 交互式遗传算法原理及其应用[M]. 北京: 国防工业出版社, 2007.
Optimal trajectory planning of a flexible manipulator for its vibration suppression using genetic algorithm
LOU Jun-qiang1,2, WEI Yan-ding3, LI Guo-ping1,2, YANG Yi-ling3, PENG Wen-fei1,2
(1. Faculty of Mechanical Engineering and Mechanics, Ningbo University, Ningbo 315211, China;2. Zhejiang Provincial Key Lab of Part Rolling Technology, Ningbo 315211, China;3. Institute of Manufacture Engineering, Zhejiang University, Hangzhou310027, China)
Here, an optimal trajectory planning method of a flexible manipulator for its vibration suppression was proposed combining the genetic algorithm and the polynomial function interpolation. The dynamic equations of the manipulator were derived using the extended Hamilton’s principle and the assumed modes method. Then, the trajectory planning principle for vibration suppression was elaborated. For trajectory planning, quintic polynomials were employed as basic functions to interpolate a trajectory’s control points displacements, and the floating values of these displacements were taken as optimal parameters to be determined. After applying constraint conditions of the initial and final positions’ motions, the optimal trajectory with the minimum vibration energy was gained using the genetic algorithm. Numerical calculations and tests verified the applicability and effectiveness of the proposed trajectory planning method. Comparing with the results tracking trajectories of quintic polynomials functions, test results showed that the amplitude of the manipular’s residual vibration tracking the optimal trajectory decreases about 10 times, and its decay time reduces from 12 s to 4.5 s, so the position control precision and operating efficiency of the system are improved.
flexible manipulator; trajectory planning; vibration suppression; genetic algorithm
10.13465/j.cnki.jvs.2016.11.001
国家自然科学基金项目(51375433;51505238); 浙江省自然科学基金项目(LY13E050008&LQ15E050002); 浙江省公益项目(2013C31017);宁波大学科研基金(XYL15021)
2015-04-28修改稿收到日期:2015-06-18
娄军强 男,博士, 讲师,1986年生
魏燕定 男,教授, 博士生导师,1970年生
TP24; TB32
A
