基于元胞自动机的城市道路交通流模型
2016-06-13叶锴石艳玲陈丽娟李丹青
叶锴 石艳玲 陈丽娟 李丹青
【摘 要】以元胞自动机(CA)为基础,针对一维单车道采用Nasch模型,对于双车道采用STCA模型,当双车道发生拥堵时,采用挤车变道元胞自动机CACF模型。并且利用上述模型,模拟分析了当车道被占用时,不同车流密度的车辆排队时间及车流平均速度情况。
【关键词】元胞自动机;Nasch模型;STCA模型;CACF模型
0 引言
偶发性交通拥堵对城市交通网的负面影响越来越大,引发了国内、外相关专业人士的深入研究。这些研究主要集中在两个方面:①车道被占用引起的偶发性交通拥堵的漂移规律,主要研究了车道被占用时,交通拥堵漂移在时间和空间上的特点[1];②偶发性交通拥堵时车辆疏散策略,研究了车道部分路段禁行、信号灯引导在疏散偶发性交通拥堵路段的作用[2]。本文基于元胞自动机模拟城市偶发性交通拥堵路段车辆的交通行为,透彻分析拥堵的发生规律和漂移机理,对交警处理车道被占用等偶发性事件而诱发的拥堵有一定的指导意义。
1 基于元胞自动机的城市单车道交通流模型
Nasch模型是研究单车道CA交通流的最典型的一种。在此模型中,车辆或者空闲位置代表一个元胞。设xm和vm分别描述第m辆车的位置和速度,vm(t+1)表示下一时刻的车速;vmax表示车辆的最大速度。xm(t)是第m辆车的时间位置函数,dm(t)为t时刻,第m辆车与前方车辆两车车头与车尾的间距。Nasch模型将车辆的行驶过程初步划分为加速、减速、随机慢化和位置更新四个过程。对于一维单车道的情况,每个元胞只需关注它前、后方的邻居元胞的状态,在以下规则下进行状态变化。规则如下:①车辆加速:若车辆速度小于vmax,vm(t+1)=min(vm(t)+1,vmax);②车辆减速:如果第m辆车和它前面的车辆的的车速之差乘以时间t后的值大于前车车尾和后车车头的间距dm(t),那么vm(t)减少为vm(t)-1,而vm(t+1)=min(vm(t),dm(t)-1);③随机慢化:车辆速度以概率q减小1,则vm(t+1)=max(vm(t)-1,0);④位置更新:车辆在城市道路上以新的速度向前行驶,xm(t+1)=xm(t)+vm(t)。
假设城市单车道上的车辆随机分布在一维离散的元胞空间上,在上述规则的作用下的车辆行驶过程便可以模拟单车道中车辆运行速度的变化。
2 基于元胞自动机的城市双车道交通流模型
因为现实中的城市交通流的状态一般为双车道,所以Chowdhury在NS单车道模型的基础上设计了STCA对称双车道元胞自动机模型。STCA模型按照NS单车道模型进行状态更新,并且按照如下规则进行变道:
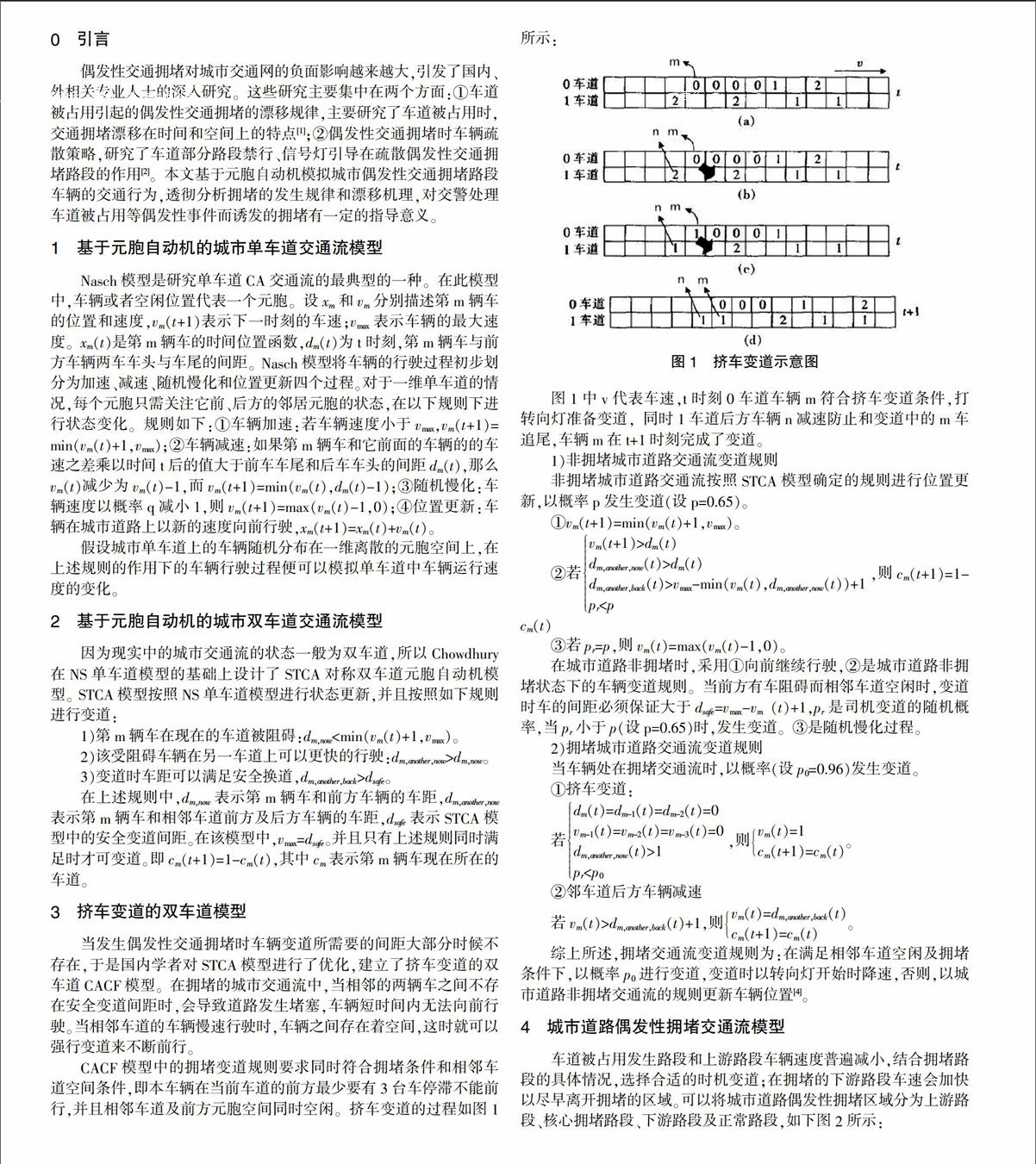
1)第m辆车在现在的车道被阻碍:dm,now 2)该受阻碍车辆在另一车道上可以更快的行驶:dm,another,now>dm,now。 3)变道时车距可以满足安全换道,dm,another,back>dsafe。 在上述规则中,dm,now表示第m辆车和前方车辆的车距,dm,another,now表示第m辆车和相邻车道前方及后方车辆的车距,dsafe表示STCA模型中的安全变道间距。在该模型中,vmax=dsafe。并且只有上述规则同时满足时才可变道。即cm(t+1)=1-cm(t),其中cm表示第m辆车现在所在的车道。 3 挤车变道的双车道模型 当发生偶发性交通拥堵时车辆变道所需要的间距大部分时候不存在,于是国内学者对STCA模型进行了优化,建立了挤车变道的双车道CACF模型。在拥堵的城市交通流中,当相邻的两辆车之间不存在安全变道间距时,会导致道路发生堵塞,车辆短时间内无法向前行驶。当相邻车道的车辆慢速行驶时,车辆之间存在着空间,这时就可以强行变道来不断前行。 CACF模型中的拥堵变道规则要求同时符合拥堵条件和相邻车道空间条件,即本车辆在当前车道的前方最少要有3台车停滞不能前行,并且相邻车道及前方元胞空间同时空闲。挤车变道的过程如图1所示: 图1 挤车变道示意图 图1中v代表车速,t时刻0车道车辆m符合挤车变道条件,打转向灯准备变道,同时1车道后方车辆n减速防止和变道中的m车追尾,车辆m在t+1时刻完成了变道。 1)非拥堵城市道路交通流变道规则 非拥堵城市道路交通流按照STCA模型确定的规则进行位置更新,以概率p发生变道(设p=0.65)。 ①vm(t+1)=min(vm(t)+1,vmax)。 ②若vm(t+1)>dm(t)dm,another,now(t)>dm(t)dm,another,back(t)>vmax-min(vm(t),dm,another,now(t))+1pr ③若pr=p,则vm(t)=max(vm(t)-1,0)。 在城市道路非拥堵时,采用①向前继续行驶,②是城市道路非拥堵状态下的车辆变道规则。当前方有车阻碍而相邻车道空闲时,变道时车的间距必须保证大于dsafe=vmax-vm(t)+1,pr是司机变道的随机概率,当pr小于p(设p=0.65)时,发生变道。③是随机慢化过程。 2)拥堵城市道路交通流变道规则 当车辆处在拥堵交通流时,以概率(设p0=0.96)发生变道。 ①挤车变道: 若dm(t)=dm-1(t)=dm-2(t)=0vm-1(t)=vm-2(t)=vm-3(t)=0dm,another,now(t)>1pr ②邻车道后方车辆减速 若vm(t)>dm,another,back(t)+1,则vm(t)=dm,another,back(t)cm(t+1)=cm(t)。
综上所述,拥堵交通流变道规则为:在满足相邻车道空闲及拥堵条件下,以概率p0进行变道,变道时以转向灯开始时降速,否则,以城市道路非拥堵交通流的规则更新车辆位置[4]。
4 城市道路偶发性拥堵交通流模型
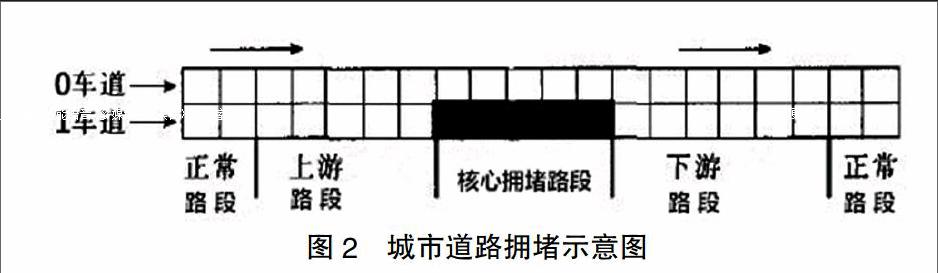
车道被占用发生路段和上游路段车辆速度普遍减小,结合拥堵路段的具体情况,选择合适的时机变道;在拥堵的下游路段车速会加快以尽早离开拥堵的区域。可以将城市道路偶发性拥堵区域分为上游路段、核心拥堵路段、下游路段及正常路段,如下图2所示:
图2 城市道路拥堵示意图
4.1 拥堵上游路段CA模型
假设上游路段为距离拥堵点200m开始,向上游路段延伸到400m。拥堵发生之后,车辆排队蔓延到上游路段,由于距离拥堵点较远,司机无法确定拥堵在哪个车道,因此变道策略采用CACF模型的正常变道策略,变道概率可设为p=0.5。
4.2 拥堵核心路段CA模型
城市道路核心拥堵的路段在拥堵点到向上游延伸的200m范围的区域。在核心拥堵路段,司机可以观察到哪一车道发生拥堵,因此根据车辆可分为2种变道策略:①车辆在核心拥堵路段所在的车道,那么可设变道概率p=1,可使用挤车变道下的CACF模型;②车辆所在的车道不是拥堵点所在车道,则变道概率p=0,此时可采用单车道Nasch模型模拟。
4.3 拥堵下游路段CA模型
城市道路偶发性拥堵下游路段为拥堵发生地点到车流下游200m的路段。司机在这一路段想尽快的驶离拥堵点,此路段的元胞自动机规则用公式可以表示为:
1)若dm 2)若dm≥dn,another,则车辆不变道。 其中dm为离开拥堵发生点后与前方车辆的距离;dn,another为与前方相邻车道中车辆的距离[5]。 4.4 城市道路偶发性拥堵其他路段CA模型 距离拥堵发生点上述表述的距离之外的其他路段可以采用STCA模型来进行模拟。 5 结论 基于元胞自动机模型,将城市道路偶发性拥堵交通流分为了4个路段进行研究,分别是上游路段、核心拥堵路段、下游路段及正常路段。本文根据不同路段交通流的不同状态提供了具体的变道策略。 本文运用CA模型模拟的城市道路偶发性交通拥堵不同路段的交通流行为,对偶发性交通拥堵的漂移和消散规律的研究有很大的实用性。 【参考文献】 [1]MAERIVoET S,MooR B D.Cellular automaton models of road traffic[J].Phys Rep, 2005, 419: 1-64. [2]惠丽,刘慕仁,孔令江.单速及多速车道元胞自动机交通流模型的研究[J].广西师范大学学报:自然科学版,2002,20(2):5-8. [3]罗钧.短时交通事件干扰下的交通流仿真研究[D].华南理工大学,2012. [4]张水潮,任刚,王炜.面向交通规划的城市道路交通拥堵度分析模型[J].吉林大学学报:工学版,2009(S2):111-115. [5]吴义虎,李意芬,喻伟,等.基于元胞自动机的城市道路偶发性拥堵交通行为模拟[J].交通科学与工程,2014(2):72-78. [责任编辑:杨玉洁]
