隧道病害快速检测技术现状及分析比较∗
2016-06-08王平让
王平让
(河南省交通科学技术研究院有限公司,河南郑州 450006)
隧道病害快速检测技术现状及分析比较∗
王平让
(河南省交通科学技术研究院有限公司,河南郑州 450006)
摘要:以计算机信号分析和图像处理为基础的快速检测技术可实现隧道病害检测的自动化、快速化和客观化,克服了传统检测方法存在的工作量大、效率低、主观性强等缺点。文中在对国内外最新隧道病害快速检测技术研究开发现状进行综述的基础上,根据传感器类型的不同将该检测技术分成基于摄像测量的快速检测技术和基于激光扫描的快速检测技术两类,选取具有代表性的研究开发机构及其检测系统进行分析,并从硬件组成和软件算法两方面对两类检测技术的特点进行了综合分析比较,提出了今后的发展方向。
关键词:隧道;病害监测;快速检测;摄像测量;激光扫描
随着隧道工程建设的快速发展,隧道病害问题日益突出。为了对隧道病害进行整治,首先需对病害情况进行全方位检测。传统的隧道病害检测方法主要采用目测,配备一定的简易设备,如机械式或数显式病害观测仪等,进行现场记录和病害标记,人工描绘病害展开图。这些检测方法需要大量的人力、物力,费时、费力,危险程度高,对于隧道拱顶病害检测还需专门的升降设备,而且检测结果主观性大,不同检测人员会得出不同的检测结果,不利于对隧道安全性进行客观和定量评价。国际隧道协会通过分析总结隧道病害检测的经验和教训,指出无损快速检测技术将是今后的发展方向。日本已经在隧道无损快速检测技术方面作了大量研究,并取得了一定的研究成果。
隧道病害快速检测技术主要采用各种形式的传感器探测隧道衬砌影像图,通过图像处理完成对病害的检测和分类等。根据传感器类型的不同,隧道病害快速检测技术可分为摄像测量检测技术和激光扫描检测技术两类。
1 摄像测量快速检测技术
摄像测量以透视几何理论为基础,基于数字影像与摄影测量的基本原理,通过摄像手段(CCD或CMOS图像传感器)确定目标的外形和运动状态,并形成图像,图像上每一个像素点的灰度反映空间物体表面某点反射光的强度,而该点在图像上的位置则与空间物体表面对应点的几何位置有关。该方法可瞬间获取被测物体的大量物理和几何信息,是一种基于数字信息和数字影像技术及自动控制手段的非接触式快速检测技术。
隧道病害摄像测量快速检测技术主要采用CCD工业相机(线阵或面阵)对隧道衬砌表面进行快速连续扫描,得到隧道衬砌表面影像图,再采用图像处理和图像识别算法提取病害信息,并绘制病害展开图。下面介绍这方面研究比较典型的研究机构及其检测系统。
1.1韩国汉阳大学

图1 韩国汉阳大学隧道检测系统
韩国汉阳大学机械工程系应用移动式机器人系统对隧道衬砌病害进行快速检测,机器人系统携带线扫描CCD工业相机(4 096像素/行)、减振器、编码器和特定光源等设备,以5 km/h的检测速度对隧道进行连续扫描。图1和图2分别为该检测系统的组成部分和硬件配置示意图。

图2 韩国汉阳大学隧道检测系统的硬件配置
1.2日本铁道技术研究所
图3和图4为日本铁道综合技术研究所研究开发的公路隧道病害快速检测系统。
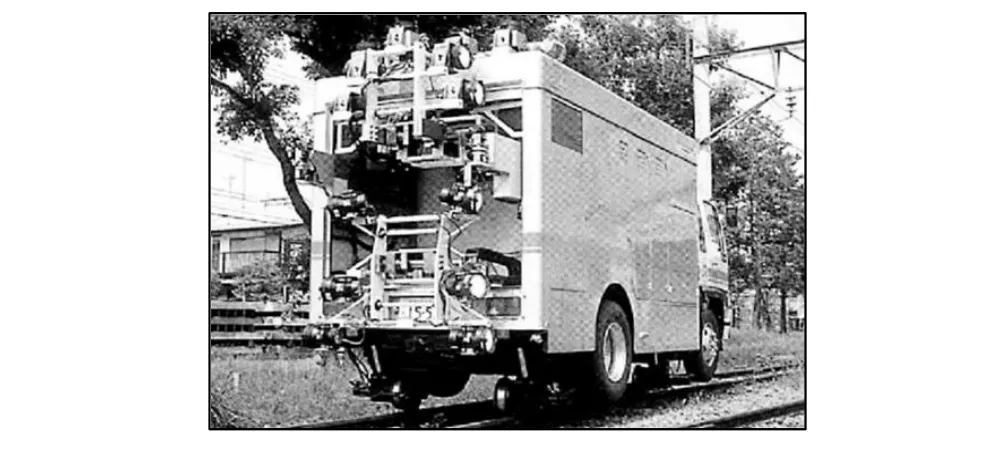
图3 日本铁道技术研究所隧道检测系统
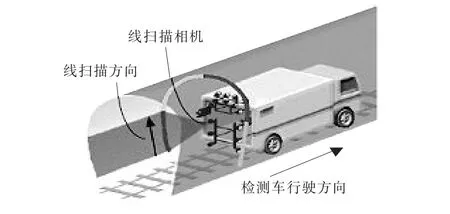
图4 日本铁道技术研究所隧道检测系统扫描示意图
该系统采用车载线扫描工业相机(图像分辨率5 000像素/行)、高能金属卤化物光源和可编程自动调焦系统对隧道进行扫描检测,检测车行驶速度13 ~25 km/h,图像分辨率0.5~1.0 mm/像素。采用的图像分析方法为:先对源图像进行中值滤波和直方图归一化处理,并进行阴影修正,然后应用动态阈值方法进行图像二值化处理,应用膨胀和腐蚀等数学形态学运算方法去除孤立点并提取连续裂缝。该方法由于图像分辨率不高及识别算法未考虑裂缝几何形态,检测到的裂缝最小宽度较大。
1.3日本计测检查株式会社
图5~7为日本计测检查株式会社开发的市场化的病害隧道快速无损检测系统。

图5 日本计测检查株式会社隧道检测系统在工作中的状况

图6 日本计测检查株式会社隧道检测系统组成

图7 日本计测检查株式会社隧道检测系统扫描示意图
该快速检测系统由车载的数台CCD工业相机、高亮度光源、发电设备、设备箱和台架等组成。所采集图像的分辨率为0.3 mm/像素。在病害识别和分析方面已开发出相应的商业化软件Crack-Draw21,可在软件中显示病害沿隧道拱顶的展开图,根据展开图可对隧道的安全状况作出评估。该系统的不足之处是不能实现病害的完全自动识别,需要计算机自动识别和人工修正相结合,人工修正的工作量较大。
2 激光扫描快速检测技术
激光扫描检测通过激光扫描器和距离传感器获取被测目标表面形态,其工作过程实际上是一个不断重复的数据采集和处理过程,通过具有一定分辨率的空间点所组成的点云图来表达系统对目标物体表面的采样结果。每扫描一个云点后,图像传感器将云点信息转换成数字电信号并直接传送给计算机系统,经过相应系统软件进行一系列处理,获取目标表面三维坐标数据,从而进行各种量算或建立立体模型,并形成视频图像。
隧道病害激光扫描快速检测技术主要采用激光扫描器对隧道衬砌表面进行连续扫描,得到隧道衬砌表面影像图。国外发达国家在这方面的研究较多,有的公司已开发出商业化检测系统。
2.1瑞士GRP5000检测系统
GRP5000是由瑞士AMBERG技术公司研究开发的隧道病害快速检测系统(见图8和图9)。

图8 瑞士GRP5000隧道检测系统

图9 瑞士GRP5000隧道检测系统扫描示意图
GRP5000系统采用激光扫描仪对隧道进行全方位检测,可得到高清影像图,可标注隧道病害并自动计算裂缝长度和渗水面积等参数,并将结果输入Excel软件进行图形报表分析。当小车在轨道上行走时,高速旋转的激光扫描仪发射的激光以螺旋线的形式对隧道表面进行全断面扫描,通过分析发射和接收到的激光信号(强度和相位差),获得隧道衬砌内表面影像图及隧道衬砌表面各点距轨道中心线的距离。激光扫描仪每秒获取高达50万个测点的断面数据,每个测点包含该位置的反射率和几何尺寸信息(角度和距离),上述测量成果构成隧道表面状态评估的基础资料。
在病害识别和分析方面有专门的商业化软件Tunnel Map,在该软件中可建立隧道的数字化模型,其中最重要的内容是隧道内表面的数字化展开图。为便于观察和输入信息,可将隧道沿拱顶中心展开,只需输入表面上某一点或对象的里程及在展开图中距拱顶中心的距离,便可定义其位置。另外,还可将隧道按区间进行划分,便于进行管理和统计等,盾构隧道可直接将每个环片定义为一个区间分别进行管理。Tunnel Map软件可充当隧道病害采集和状态评价系统,用于观察和收集已有建筑的结构数据,根据测点的几何信息对隧道进行限界分析,还可分类标注各种病害,如裂缝和渗水区域等。病害展开图具有坐标信息,可自动计算并统计裂缝长度和渗水面积等病害的几何尺寸,这些数字化的信息和数据可作为隧道安全状态评估的依据。
2.2德国SPACETEC TS3检测系统
SPACETEC TS3是由德国SPACETEC公司研究开发的病害隧道快速扫描检测系统(见图10和图11)。该系统可安装在任何检测车上,能对隧道进行全方位扫描检测,检测隧道衬砌渗水及其渗水面积、裂缝的宽度及位置。该检测系统激光扫描器的扫描频率为280 Hz,图像分辨率为5 mm。

图10 德国SPACETEC TS3隧道检测系统

图11 德国SPACETEC TS3隧道检测系统组成
2.3法国ATLAS 70检测系统
ATLAS 70是由法国HGH红外系统公司研究开发的多传感器隧道无损快速检测系统(见图12)。属于多传感器检测系统,配置了激光扫描传感器、红外扫描传感器、测距仪和计程仪等设备,可进行隧道裂缝和渗水的全方位检测。激光器扫描频率为300 Hz,图像分辨率为5 mm。

图12 法国ATLAS 70隧道检测系统
3 分析比较
基于摄像测量和基于激光扫描的隧道病害快速检测方法的技术指标比较见表1。

表1 隧道病害快速检测技术比较
基于摄像测量的隧道病害快速检测技术的优点是采用的工业相机分辨率很高,特别是采用线阵CCD工业相机时,分辨率更高,可达0.2 mm/像素,通常可检测出细微的裂缝。其不足之处是需要特定的光源,光源系统的好坏直接决定了图像质量,从而决定图像识别算法的效果;另外,大多数算法还不能实现病害的完全自动识别,需要和人工修正相结合,人工修正工作量较大。
基于激光扫描的隧道病害快速检测技术的优点是不需要特定光源,图像质量较好。其不足之处是图像分辨率不高,如瑞士AMBERG技术公司开发的GRP5000检测系统采集到的图像分辨率仅为5 mm/像素,且不能进行病害的自动识别;另外,大多数激光扫描检测技术主要提供一个隧道衬砌病害和限界分析的数字化管理平台,主要根据检测人员的经验进行病害识别和分析。
4 结语
隧道病害快速检测技术可实现隧道病害检测的快速化和客观化,根据所采用传感器类型的不同,可分为摄像测量快速检测技术和激光扫描快速检测技术两类。两类方法各有优缺点,摄像测量快速检测技术获取的图像分辨率高,但需要特定的高亮度光源,而激光扫描快速检测技术不需要特定的光源,但图像的分辨率相对较低。两种方法都可以获取清晰的隧道病害图像,但在病害识别和分析上,都要采用人工识别或人工修正的方法,自动识别程度不高。
病害的自动识别和评估、病害检测结果的高精度化等将是今后隧道病害快速检测技术研究的热点,数字摄像测量和激光扫描技术的集成将是今后隧道病害快速检测技术的发展方向。
参考文献:
[1] Haack A,Schreyer J,Jackel G.State of the art of nondestructive testing methods for determining the state of a tunnel lining[J].Tunnelling and Underground Space technology,1995,10(4).
[2] Richards J A.Inspection,maintenance and repair of tunnels:international lessons and practice[J].Tunnelling and Underground Space technology,1998,13(4).
[3] Asakura T,Kojima Y.Tunnel maintenance in Japan [J].Tunnelling and Underground Space technology,2003,18(18).
[4] Mashimo H,Ishimura T.State of the art and future prospect of maintenance and operation of road tunnel [R].ISARC,2006.
[5] Sehenk T.Digital photogrammetry[M].Taylor & Francis Ltd,1999.
[6] Yu Seung-Nam,Jang Jae-Ho,Han Chang-Soo.Auto inspection system using a mobile robot for detecting con-crete cracks in a tunnel[J].Automation in Construction,2007(16).
[7] HIroshi Sasama,Masato Ukai,Masaru Ohta,et al.Inspection system for railway facilities using a continuously scanned image[J].Electrical Engineering in Japan,1998,125(2).
[8] Masato Ukai.Development of image processing technique for detection of tunnel wall deformation using continuously scanned image[R].Railway Technical Research Institute,2000.
[9] Masato Kuai.Advanced inspection system of tunnel wall deformation using image processing[R].Railway Technical Research Institute,2007.
[10] Wehr A,Lohr U.Airborne laser scanning:an introduction and overview[J].ISPRS Journal of Photogrammetry& Remote Sensing,1999,54(2).
该系统采用的图像分析算法如下:首先对源图像进行直方图均衡化,以增强图像的对比度,应用Sobel和Laplacian检测算子识别裂缝边缘,再应用Gaussian滤波器降噪,通过设定的阈值识别裂缝,最后应用图搜索算法提取裂缝。该系统可检测裂缝的宽度、长度和走向等参数。但由于采用的只是通用的图像处理方法,未考虑裂缝的几何形态,算法不完善,病害识别准确度不高。
中图分类号:U457
文献标志码:A
文章编号:1671-2668(2016)03-0241-05
基金项目:∗河南省交通运输厅科技计划项目(2012D07)
收稿日期:2016-02-02
