基于多岛遗传算法的大型疏浚抓斗机构优化设计
2016-05-28甄义省
甄义省
中国铁建港航局集团有限公司
陈凯凯
武汉理工大学物流工程学院
基于多岛遗传算法的大型疏浚抓斗机构优化设计
甄义省
中国铁建港航局集团有限公司
陈凯凯
武汉理工大学物流工程学院
摘要:根据大型疏浚抓斗的作业特点,对设备结构进行简化,获得抓斗挖料力学模型。提出了用于描述抓斗挖掘性能的推重比,以此为优化目标,提取出影响抓斗推重比的7个关键参数,建立了抓斗机构的数学优化模型。基于多岛遗传算法在全局范围内寻优,实现了对抓斗机构的优化。优化后抓斗性能得到明显改善:推重比由原方案中的4.972降低为3.470,最大单缸推力减少了27.8%,挖料量增加了3.4%。
关键词:疏浚抓斗; 推重比; 优化模型; 多岛遗传算法
1引言
疏浚抓斗主要用于河道湖泊、近海港口、水利工程等的疏浚清淤工作,根据动力源不同可分为重力式抓斗和液压式抓斗。重力式抓斗以抓斗自重作为动力源,协同起升绳、开闭绳实现装卸料;液压式抓斗则由电机提供动力,通过液压缸伸缩驱动斗瓣运动,主要用于挖掘阻力较大的场合。目前,日本的“东祥号”和“五祥号”疏浚船已经配备了200 m3级液压抓斗[1],我国自主研发的疏浚抓斗中以重力式抓斗居多,且斗容普遍低于30 m3,50 m3级抓斗也正积极研制中[2]。近些年来,随着海上疏浚和填筑工程日渐兴起,疏浚市场对疏浚设备的效率、成本和节能减排等提出了更高的要求,大型化、高效率和低耗能已经成为疏浚抓斗发展的趋势,研制超大型液压抓斗正成为我国疏浚行业所面临的一大挑战。
本文研究的大型疏浚抓斗采用液压油缸驱动,具有挖掘量大、结构尺寸大、受载复杂等特点。通过产品类比和已有经验进行了初步方案设计,在此基础上基于高效、节能的设计要求,对抓斗机构进行了深入的优化设计研究,取得了一定的研究成果。
2抓斗机构数学优化模型
2.1抓斗机构简化模型
疏浚抓斗结构组成如图1所示,斗瓣与横梁在支撑铰点铰接。作业时,通过控制液压油缸伸缩驱动斗瓣闭合、开启,从而完成对物料的装卸作业。斗瓣对称布置在左右两侧,通过连杆确保两斗瓣同步运动。根据抓斗结构组成将抓斗机构简化成图2所示。图中,O点为斗瓣与支撑架的连接铰点,D点为斗瓣与油缸的连接铰点,AC表示斗瓣底板,AB为斗瓣侧刃。
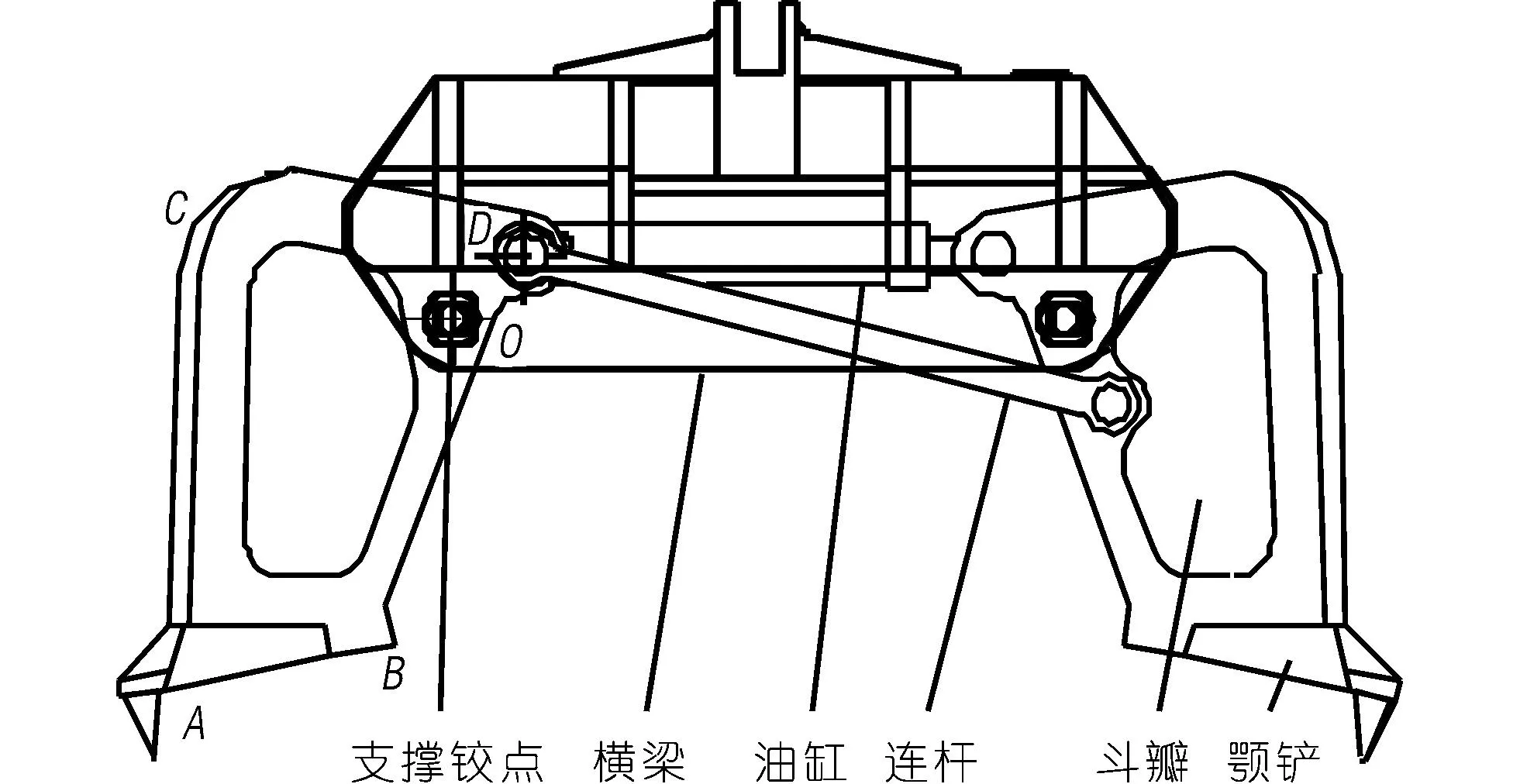
图1 疏浚抓斗结构组成

图2 抓斗机构简化示意图
2.2优化模型
2.2.1设计参数
设计参数是根据实际作业条件或实际需求,在抓斗设计设计时应满足的基本参数,本文中包括2个设计参数:抓斗额定斗容[V]和斗瓣最大转角η。
2.2.2设计变量
设计变量的选取需要进行综合考量,如变量对目标函数的影响是否显著,变量之间是否相互独立等。本文选取了7个结构参数作为设计变量,即X=[x1,x2,x3,x4,x5,x6,x7]T,如图2所示。这7个设计变量为斗瓣的主体结构参数,局部结构参数则需要结合结构强度、刚度等进一步确定。其中,x1为油缸铰点半径,x2为底刃铰点半径,x3为斗瓣结构张角,x4为斗瓣后角,x5为斗瓣前角,x6为斗瓣间距,x7为斗瓣宽度。
2.2.3优化目标
为获得最大挖掘性能,应使抓斗挖料量尽可能大,而液压油缸的最大推力尽可能小,使系统动力得到充分发挥。故将抓斗油缸最大推力Fmax与挖掘物料的重量Gb的比值作为目标函数,称为液压抓斗的推重比,并使其在约束条件下达到最小,即
其中,液压油缸最大推力
(1)
αi为斗瓣位置参数,表示在斗瓣处于某一转角状态时,抓斗侧刃与竖直平面之间的夹角,αi∈(0,η)。F(X,αi)为抓斗在αi位置时的液压油缸的推力,是设计变量X和位置参数αi的函数。疏浚抓斗在挖掘作业过程中,斗瓣受到的力主要有液压油缸对斗体的驱动力F,支撑架对斗体的支持力F支,斗体自身重力G,浮力F浮,水平刃口的切入阻力R1,颚铲侧板切割刃的切入阻力R2,土体的推压阻力R3和抓斗侧板受到的摩擦阻力R4,各力分量表达式参考自文献[3]中对电液疏浚抓斗所做的一些研究,受力情况如图3。各力在O点取矩,由力矩平衡可得到油缸推力表达式,式中li为各力对应的力臂。
(2)
图4为抓斗挖料示意图,阴影部分为被挖掘物料。抓斗闭合时挖掘物料的重量为Gb(X)=γV(X),γ为物料容重,则被挖掘物料体积为
(3)
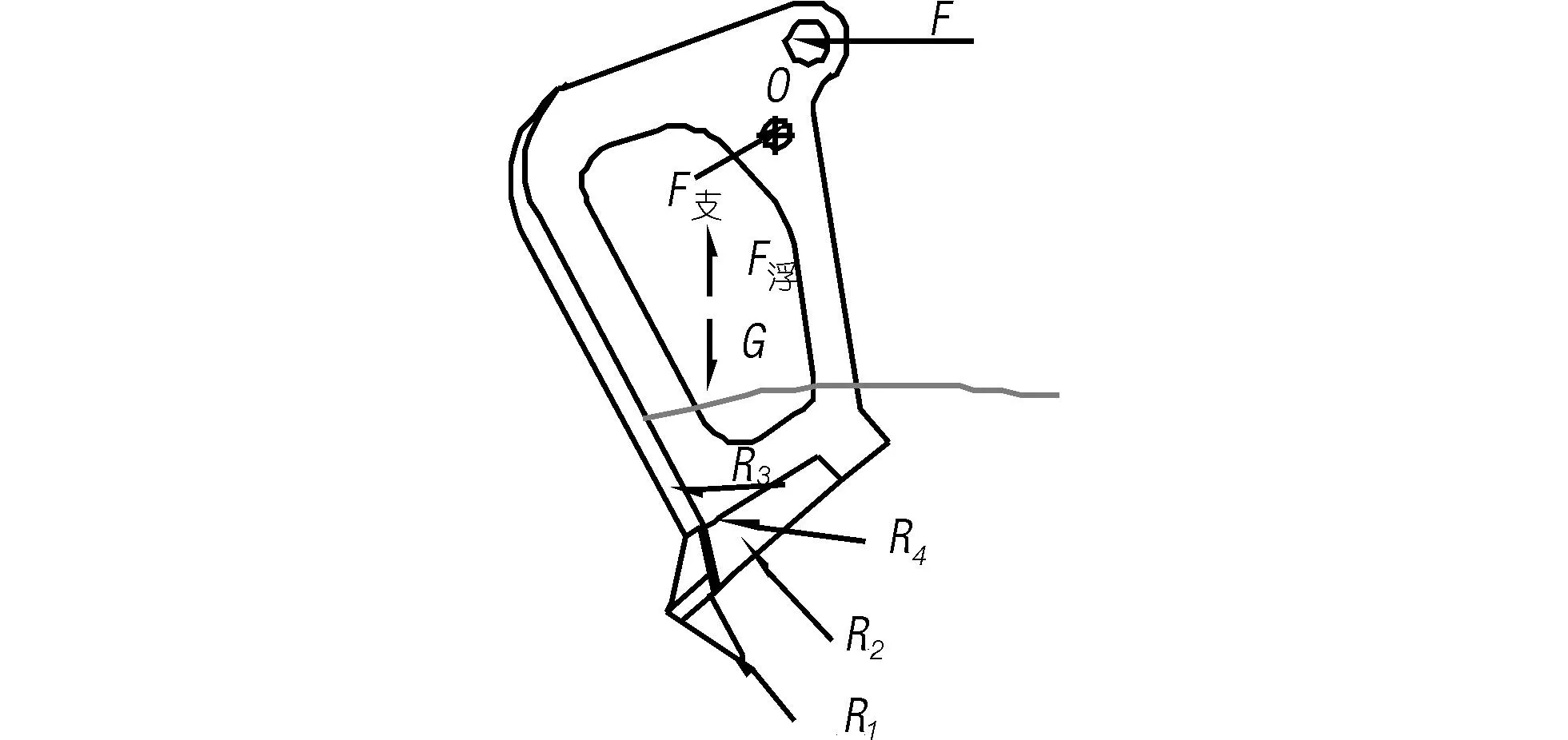
图3 抓斗挖料受力模型

图4 抓斗挖料量计算模型
2.2.4边界条件和约束条件
结构尺寸边界
侧刃与底刃夹角限制
结构关键尺寸比值限制
保证液压油缸有足够的动作空间
单缸最大推力限制
抓斗挖掘物料体积应不低于设计值,即

3优化算法
该优化模型具有6个设计变量、1个非线性目标函数和10个不等式约束条件,属于单目标非线性优化问题。在目标函数中,因为油缸最大推力由式子Fmax=max[F(X,αi)]获得,即Fmax取诸多离散状态下F(X,αi)的最大值。这可能导致目标函数表现出非线性、非连续和不可微的特点,因而难以采用传统的基于函数梯度或导数的搜索算法,运用多岛遗传算法(MIGA,Multi-Island Genetic Algorithms)可以解决此类优化问题[4]。
MIGA是一种基于随机搜索技术的进化计算方法,可以对设计空间进行全局探索,从而避免了集中在局部区域的搜索,具有比传统遗传算法(GA,Genetic Algorithms)更优良的全局求解能力和计算效率[4]。MIGA将一个大的种群分成若干个子种群,称之为“岛”。在每个岛上仍然采用传统GA算法进行子种群的演化。子种群每演化一定代数,会按一定的比例迁移到其它岛上,完成不同子种群间个体的交换,然后继续按GA算法演化[5]。图5显示了MIGA的计算流程。

图5 MIGA算法流程
4优化计算及结果
本优化计算以136 m3抓斗的初步方案为研究对象。MIGA 算法中相关参数设置如下:子群规模选择30,岛的个数选择10,总进化代数选择 20,交叉概率取 0.9,变异概率取0.05,岛间迁移率取0.2,迁移间隔代数选择5,保留到下一代的精英个体量选择3,总迭代次数为6 000次。图6显示了目标函数随迭代次数的变化曲线。从图中可以看出,在MIGA 算法寻优过程中,出现了少量的大幅度“跳动”现象,但迭代结果大多在3.5附近波动,表明算法仍保持了一定的稳定性。
图6 优化目标迭代结果
优化前后抓斗机构设计方案如表1所示。从表中可以看出,在机构优化后,抓斗的推重比由4.972下降为3.470,优化效果显著。其中,单缸最大推力由5 533.3 kN下降为3 993.1 kN,降低了27.8%;而抓斗的挖料量由139.1 m3上升为143.8m3,增加了3.4%。在优化方案中,设计变量x1、x5和x7均已接近上限值。这表明抓斗机构设计中,在保证机构不产生干涉的前提下,对油缸铰点半径、斗瓣前角和斗瓣宽度3个结构参数应尽量取最大值,这有利于抓斗挖掘性能的提升。
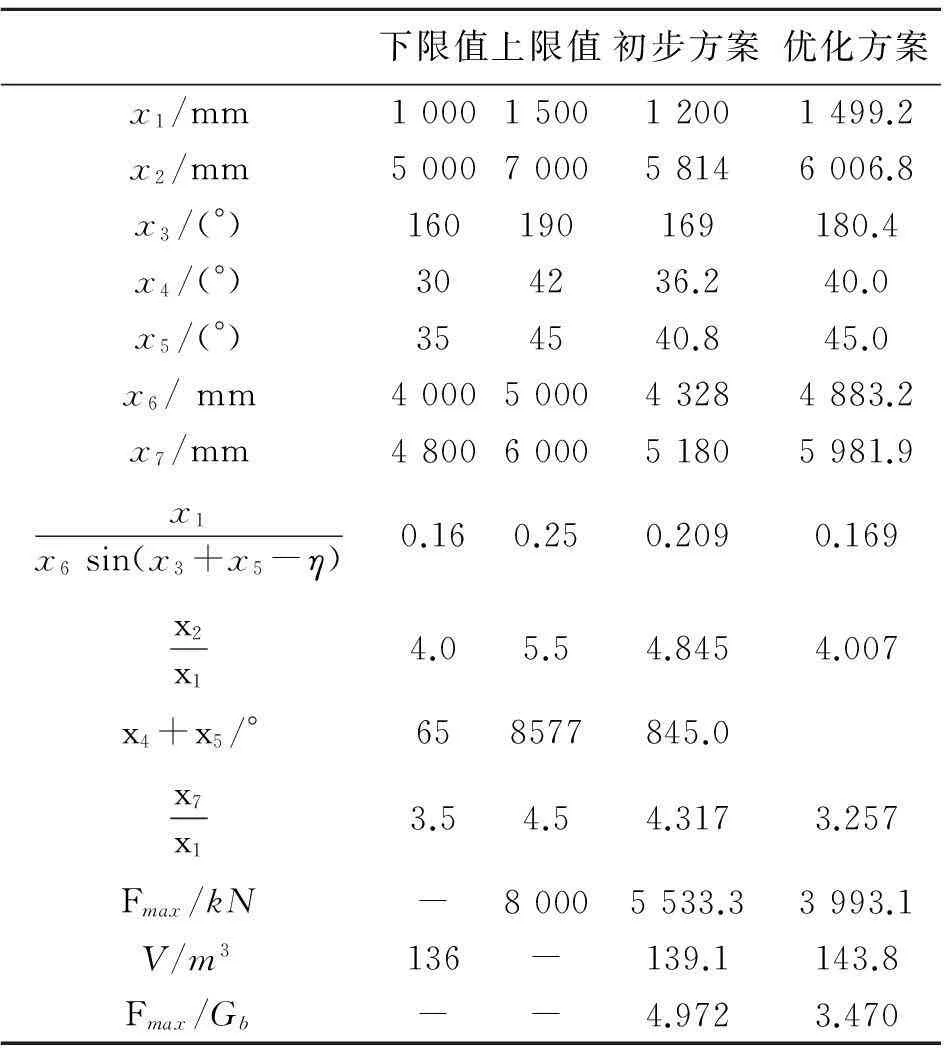
表1 不同插入深度下得到的优化方案
5结语
大型疏浚抓斗具有挖料量大、适应能力强的特点,是海上疏浚和填筑工程中的关键设备。本文对抓斗机构进行数学建模,提出了用于描述抓斗挖掘性能的推重比概念。通过多岛遗传算法(MIGA)对设计空间进行全局探索,将推重比由原方案中的4.972降低为3.470,使抓斗挖掘性能得到进一步的提升。
参 考 文 献
[1]田金柱,蔡峰,张巍华,王智伟. 挖泥船用200 m3大型抓斗机电气系统设计基于多岛遗传算法的大型疏浚抓斗机构优化设计[J].船舶工程,2015,S1:163-166.
[2]潘品锋,张玉莲. 50 m3级大型疏浚抓斗参数设计及CAE静力分析[J]. 造船技术, 2015(2): 78-84.
[3]许炎林,胡吉全. 电液疏浚抓斗挖掘过程受力分析[J]. 武汉理工大学学报(交通科学与工程版), 2015,05:1079-1082+1086.
[4]刘克龙,姚卫星,余庆雄. 几种新型多学科设计优化算法及比较[J].计算机集成制造系统,2007,13(2):209-216.
[5]周威,陆金桂. 多岛遗传算法在螺旋桨优化设计中的应用[J]. 船舶工程, 2014,05:46-48+68.
Mechanism Optimization of Large Dredging Grab Based on Multi-Island Genetic Algorithms
CRCC Harbour & Channel Engineering Bureau Group Co.Ltd,Zhen Yisheng
School of Logistics Engineering Wuhan University of TechnologyChen Kaikai
Abstract:According to the operating characteristics of large-scale dredging grab, a structural predigestion of the device was performed, and a mechanical model of the grab was obtained. A new conception, named thrust-weight ratio, was proposed to describe the performance of grab. Based on the optimization target of minimizing the thrust-weight ratio, 7 critical parameters were extracted, and a mathematical model of the grab mechanism was established. Using the multi-island genetic algorithms (MIGA) to find the best solution in the global scope. And the solution optimized brings a great improvement to the grab performance: the thrust-weight ratio decreased to 3.470 from 4.972, and the largest thrust of a single hydraulic cylinder declined 27.8%, however, digging capacity grew 3.4%.
Key words:dredging grab, thrust-weight ratio, optimization model, MIGA
DOI:10.3963/j.issn.1000-8969.2016.02.002
收稿日期:2016-03-22
甄义省: 519000, 广东省珠海市香州区翠峰街189号