港口移动式高架起重机臂架结构优化仿真实验*
2016-05-28大连理工大学机械工程学院潘志毅
大连理工大学机械工程学院 王 冲 潘志毅
港口移动式高架起重机臂架结构优化仿真实验*
大连理工大学机械工程学院王冲潘志毅
摘要:港口移动式高架起重机臂架结构设计的好坏将直接影响整机性能的优劣。建立了高架起重机臂架力学模型,通过Matlab/GUI开发了高架起重机臂架结构计算软件,实现了高架起重机臂架强度、刚度和稳定性指标的程序迭代计算。对1200 t·m高架起重机臂架结构进行了优化仿真实验,得到了各幅度下臂架截面参数变化对上述指标的影响,确定了满足指标要求的各截面设计参数。ANSYS分析结果表明,优化后臂架自重较原结构降低了3.7%,为高架起重机臂架结构设计提供了参考。
关键词:港口移动式高架起重机; 起重臂; 结构设计; Matlab
1引言
港口移动式高架起重机(以下简称高架起重机)是一种由轮胎式起重机发展而来的港口多用途起重设备,因具有良好的机动性、适用性和经济性而在国外港口得到广泛应用[1],其构造如图1所示。起重臂作为高架起重机的核心承载构件,其结构设计好坏将直接影响整机性能的优劣, 其中倒三角形臂架结构是高架起重机常见结构形式之一,此时变幅油缸铰接于臂架下方而承受较大压力, 易存在承
压失稳风险[2]。矩形臂架结构由于变幅油缸具有可铰接于臂架上方而使其受拉、在有效避免失稳的同时防止货物摆动对油缸造成损坏以及提升作业空间的优点,从而越来越受设计者青睐。然而,目前高架起重机在国内尚处研发阶段,现有研究又多围绕倒三角形臂架系统对其铰点布局展开多目标优化和仿真分析,针对高架起重机矩形臂架结构设计的研究尚不多见[3-6]。

1.塔柱 2.变幅油缸 3.起重臂 4.吊钩 5.起升滑轮组 6.补偿滑轮组 7.司机室 8.撑杆 9.上车系统总成 10.下车系统总成图1 港口移动式高架起重机的构造
一直以来,能够快速设计出具有足够强度、刚度和稳定性而且重量又轻的臂架结构是设计者追求的目标。传统设计时,人工计算量庞大且较依赖设计者经验,近年来虽有不少学者运用有限元参数化和现代优化算法进行臂架结构的优化设计,但其较为复杂、不便于工程人员快速掌握[7-10]。因此,开发高架起重机臂架结构计算软件进行仿真实验,可以有效缩短设计周期,提高设计质量。
本文以港口移动式高架起重机为研究对象,基于臂架力学模型,利用Matlab/GUI开发了高架起重机臂架结构计算软件,对1 200 tm高架起重机臂架结构进行了优化仿真实验,确定了臂架截面合理设计参数。最后,通过ANSYS分析验证了臂架结构参数取值的合理性和计算软件的可行性。
2高架起重机臂架力学模型
高架起重机臂架结构属于空间桁架结构,衡量其性能优劣的关键指标分别为强度、刚度和稳定性,其在变幅平面和回转平面的力学模型可分别简化为外伸梁和悬臂梁[11],如图2所示。

图2 高架起重机臂架力学模型
图中:O、O1和O2分别为臂架根部、油缸根部和塔柱滑轮组的铰点位置;Lb为臂架长度;H1、H2和H3分别为臂架根部、中部和端部截面高度;W1、W2和W3分别为臂架根部、中部和端部截面宽度;Py、Px和Ps分别为臂架起升载荷力、端部水平分力和起升钢丝绳作用力;PB和Pz分别为臂架在变幅平面和回转平面内惯性力。
2.1臂架强度计算
由图2臂架力学模型可知,高架起重机臂架结构在变幅平面承受轴向力N和弯矩Mx',在回转平面承受横向力T和弯矩My',属于双向压弯构件,公式(1)给出了其臂架强度校核计算方法[11]。
(1)
式中:σ1为臂架截面强度计算应力;A为臂架截面面积;Wx'、Wy'分别为臂架截面对x'轴和y'轴抗弯模量;[σ]为臂架许用应力[12],见公式(2)。
(2)
式中:σs、σb分别为材料屈服极限和抗拉极限,臂架材料选用Q345B时,σs=325 MPa,σb=470 MPa;n为安全系数,根据B1载荷组合取为1.34,此时[σ]=243 MPa。
2.2臂架刚度计算
起重机刚度常以在规定载荷作用于指定位置时,结构在某一位置的静态弹性变形来表征,结合桁架臂挠度计算方法可给出高架起重机臂架刚度校核计算方法[11],见公式(3)。
(3)
式中:NEx'为臂架对x'轴名义欧拉临界力;Fy为臂端载荷竖直分力;L'为臂架端部与计算截面间沿臂架轴线方向距离;q为臂架自重均布载荷;E、Ix'分别为臂架弹性模量和对x'轴惯性矩;[f]为臂架许用静刚度,根据规范[12]取[f]= 0.15(L')2/1 000,其最大值为0.29 m。
2.3臂架结构稳定性计算
双向压弯桁架臂架结构除强度校核计算外,还应分别进行整体稳定性和单肢稳定性校核计算,见公式(4)。
(4)
式中:σ2为臂架稳定性计算应力;σw、σdws和σdwx分别为臂架截面整体稳定性和上、下弦杆单肢稳定性计算应力,见公式(5)。
(5)
式中:φ、φxg分别为臂架截面和主弦杆稳定性系数;Axg为单个弦杆截面面积;NEx'、NEy'为臂架结构对x'轴和y'轴的名义欧拉临界力。
3臂架结构计算软件开发
高架起重机臂架截面尺寸作为臂架结构的关键参数,其设计合理与否将直接决定臂架性能好坏。设计时为有效避免人工计算的庞大工作量,根据上节理论公式推导,利用Matlab/GUI开发高架起重机臂架结构计算软件,实现了高架起重机臂架强度、刚度和稳定性的程序迭代计算。软件主要包括操作界面和主程序两部分。首先运用GUI(Graphical User Interface)编制软件操作界面以便用户按实际情况设定各参数初始值[13]。然后编写主程序,其中,回调函数是其核心部分,它是在界面控件被触发时对事件的响应,即用户在完成设计参数输入并点击相应计算按钮时,软件自动调用该按钮对应程序进行计算[14]。
高架起重机臂架结构计算软件的程序流程图如图3所示,自臂架端部至根部计算过程中,首先令i=0,Lbx=0,并以ΔLbx为迭代步长依次进行各幅度下高架起重机臂架结构强度、刚度和稳定性的校核计算。其中若任一校核结果不满足要求,均需返回修改相应参数重新计算。若均满足要求,则Lbx=Lbx+i×ΔLbx,并判断Lbx是否大于臂架总长度Lb,若成立,则结束循环;否则令i=i+1继续迭代直至循环结束。

图3 高架起重机臂架结构计算软件的程序流程图
4臂架结构优化仿真实验
为实现高架起重机臂架结构的快速优化设计,在开发的臂架结构计算软件基础上,对1 200 tm高架起重机臂架结构进行优化仿真实验,依次分析臂架根部、中部和端部截面参数变化对强度、刚度和稳定性指标的影响规律(实验1-3),并由此确定各截面合理设计参数。
4.1实验1
在臂架根部截面宽度W1等参数一定时,各幅度下臂架应力和挠度随根部截面高度H1变化的曲线分别如图4-6所示。
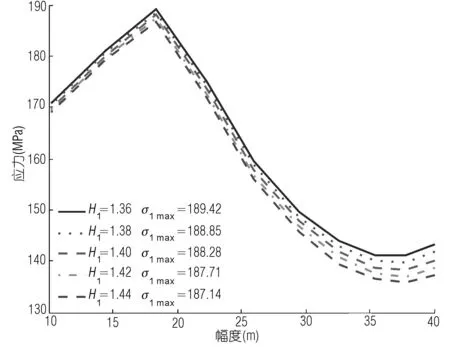
4 各幅度下臂架强度应力随H1变化曲线

图5 各幅度下臂架稳定性应力随H1变化曲线
由图4-5发现,一方面,高架起重机臂架强度和稳定性应力随工作幅度的增大均先增大后迅速减小,在18 m幅度附近达到最大,且前者最大应力普遍小于后者;另一方面,随根部截面高度H1增大,臂架最大应力先减小后缓慢增大,在H1达到1.42 m时开始出现转折。
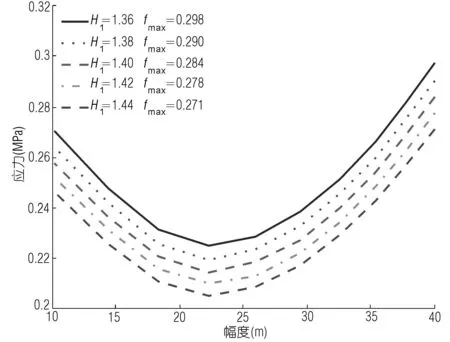
图6 各幅度下臂架挠度随H1变化曲线
由图6发现,高架起重机臂架挠度随工作幅度增大而先减后增,在最大幅度处达到最大;同时各幅度下臂架挠度随高度H1增大而减小,在H1大于1.38 m时开始小于许用刚度值。
4.2实验2
在臂架根部截面高度H1等参数一定时,各幅度下臂架应力和挠度随根部截面宽度W1变化的曲线分别如图7~9所示。
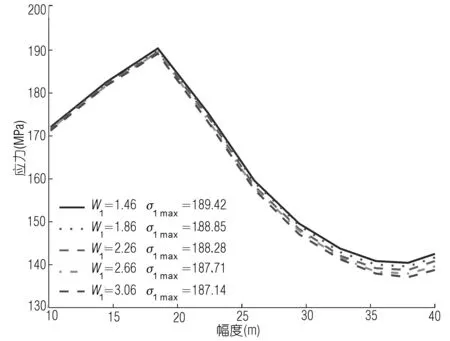
图7 各幅度下臂架强度应力随W1变化曲线

图8 各幅度下臂架稳定性应力随W1变化曲线
由图7~8发现,高架起重机臂架强度和稳定性应力随根部截面宽度W1及工作幅度的变化规律与实验1基本一致,两者均随工作幅度的增大而先增大后迅速减小,并在18 m幅度附近达到最大;随截面宽度W1增大,臂架最大应力先减小后缓慢增大,在W1达到2.66 m时开始出现转折。

图9 各幅度下臂架挠度随W1变化曲线
对比图9与图6发现,尽管两者曲线均随工作幅度的增大而先减后增,但图9曲线随根部截面宽度W1的增大不减反增,与图6曲线随根部截面高度H1增大而减小的趋势截然相反。此外,臂架截面高度值和宽度值对其应力、挠度和自重等性能的影响程度亦不同。因此,为确定最佳设计参数组合,实验3进一步研究等面积下不同截面高度H1和宽度W1组合对上述性能的影响。
4.3实验3
由实验1和2可知,在臂架根部截面高度H1、宽度W1分别取值1.40 m和2.26 m时,其最大应力最接近许用值。因此,取二者之积H1×W1≈3.16 m2作为臂架根部截面积定值,分别选取表1中不同参数组合进行臂架应力、挠度和理论重量的分析计算,其结果详见表1。
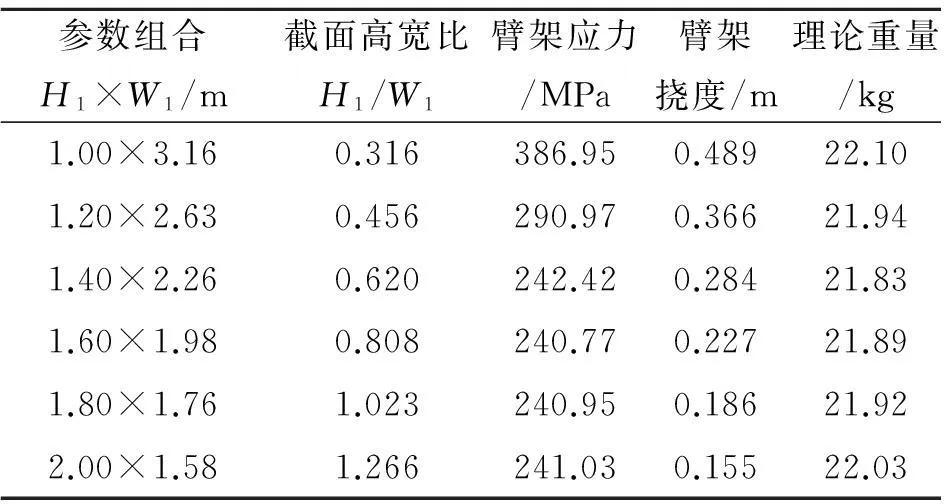
表1 表1 不同臂架根部截面参数组合的计算结果
由表1可知,在臂架根部截面面积一定且其截面高宽比(H1/W1)小于0.62时,随比值的增大,臂架应力、挠度和自重均呈减小趋势;但随比值的进一步增大,臂架挠度逐渐减小而应力和自重却呈逐步上升趋势,说明设计时应在臂架应力和挠度均满足要求前提下尽可能选择其高宽比值较低的参数组合以降低自重。本文在比值达到0.62时,臂架应力和挠度均满足要求且自重最轻,此时臂架组合为1.40 m×2.26 m,即高架起重机臂架根部截面的高度和宽度分别取值1.40 m和2.26 m。
因此,结合1 200 tm高架起重机臂架截面原始结构尺寸,综合运用以上实验方法并适当调整部分参数取值,最终可确定其臂架结构各截面设计参数,详见表2。

表2 高架起重机臂架结构各截面设计参数
5臂架结构有限元分析
为验证上节实验中高架起重机臂架截面参数取值的合理性,利用ANSYS软件建立其臂架结构有限元模型,自最小工作幅度(10 m)至最大工作幅度(40 m)的过程中,以每4 m幅度为间隔选取各幅度及对应的最大起重量作为计算工况进行静力学分析,其结果详见表3。其中,图10给出了10 m幅度下优化前后臂架结构的应力图,其最大应力分别为198.444 MPa和214.978 MPa,均发生在臂架端部载荷施加处。

表3 高架起重机臂架结构ANSYS分析结果

图10 10 m幅度下优化前后臂架结构的应力图
由表3结果可知,优化后臂架最大应力σmax=240.749 MPa、最大位移fmax= 0.279 m,二者均较原结构有所提高,且由式(2)~(3)可知臂架许用应力[σ]=243 MPa、许用挠度[f]=0.29 m,满足σmax<[σ]和fmax<[f];同时由软件计算得知,臂架自重由原始22 832 kg降低到21 981 kg,降低了3.7%,验证了臂架截面参数取值的合理性。此外,随工作幅度增大,臂架应力呈先增后减趋势,且在前1/3幅度(18 m)附近达到最大;臂架位移呈先减后增趋势,一般在两极限幅度处的取值较大,与上节实验规律基本一致。
6结语
(1)基于Matlab软件平台开发了高架起重机臂架结构计算软件,对1 200 tm高架起重机臂架结构进行优化仿真实验,得到了臂架性能随截面参数变化的规律,并由此优化了参数取值,优化后臂架自重降低了3.7%,为高架起重机臂架结构设计提供了参考;
(2)臂架截面参数一定时,随工作幅度增大,臂架应力呈先增大后减小趋势,在前1/3幅度附近处达到最大;臂架挠度呈先减小后增大趋势,在最大工作幅度处取得最大值,为后续典型工况的选取提供了依据;
(3)臂架截面面积一定时,随截面高度与宽度比值(H/W)的增大,臂架应力和自重呈先减小后增大趋势,臂架挠度呈逐步减小趋势,设计时应在臂架应力和位移均满足要求前提下尽可能选择比值较低的参数组合以降低自重。
参 考 文 献
[1]潘志毅,李儒风,王雪飞,等. 港口移动式高架起重机发展现状及关键技术[J]. 港口装卸, 2013(2): 5-8.
[2]潘志毅,周晓龙,李选朋,等. 港口移动式高架起重机变幅系统优化仿真实验[J]. 实验室研究与探索,2014(10): 36-40.
[3]张寒,李映新,向桂强. 移动式港口高架起重机[J]. 起重运输机械, 2015(1): 74-78.
[4]李儒风,潘志毅,白朝阳,等. 基于灰色聚类法的港口移动式高架起重机变幅系统多目标优化设计[J]. 起重运输机械, 2014(04): 21-25.
[5]周晓龙. 港口移动式高架起重机变幅系统方案设计[D]. 大连:大连理工大学, 2014.
[6]李儒风. 港口移动式高架起重机变幅系统多目标优化设计[D]. 大连:大连理工大学, 2013.
[7]张欢,徐长生. 基于MATLAB及参数化建模的起重机桁架式臂架结构优化设计[J]. 武汉理工大学学报, 2011(1): 201-204.
[8]张玉星. 履带起重机臂架结构优化设计及有限元分析[D]. 太原:太原科技大学, 2013.
[9]李洪富. 起重机桁架式单臂架结构的参数化设计与优化[D]. 武汉:武汉理工大学, 2014.
[10]王珂. 基于结构仿生的塔式起重机臂架优化设计研究[D]. 太原:中北大学, 2015.
[11]王金诺,于兰峰. 起重运输机金属结构[M]. 北京: 中国铁道出版社, 2002.
[12]GB/T 3811-2008. 起重机设计规范[S].
[13]钟可君,张海林. 基于Matlab GUI设计的光学实验仿真[J]. 实验室研究与探索, 2010(10): 52-53.
[14]李彤,项四通,李吉宗. 基于Matlab的材料力学图形用户界面系统开发[J]. 实验室研究与探索, 2010(08): 42-44.
Simulation Research on Optimization of Boom Structure of Mobile Harbor Crane
School of Mechanical Engineering Dalian University of TechnologyWangChongPan Zhiyi
Abstract:Mobile harbor crane is evolved from mobile crane,and becomes a sort of multipurpose lifting equipment used in harbor, which currently is still in the stage of R&D in our country. And the quality of boom structure will directly determine the overall performance of crane. To this end, the mechanical model of the boom structure of mobile harbor crane is established, and the calculation software is also developed by using Matlab/GUI for the optimization design of the boom structure. Ultimately, the iterative calculation of strength, stiffness and stability is achieved. Furthermore, a simulation research on the optimization of 1200t·m mobile harbor crane is implemented, and the impacts of boom cross-sectional parameters on these performance indicators are obtained, thus the best design parameters are determined. ANSYS analysis shows that the boom weight reduced by 3.7% after optimization. The work is useful for the boom structure design of mobile harbor crane.
Key words:mobile harbor crane; boom; structural design; Matlab
DOI:10.3963/j.issn.1000-8969.2016.02.005
收稿日期:2016-03-15
基金项目:国家自然科学基金(51475068)
王冲: 116024,辽宁省大连市甘井子区凌工路2号