基于多维gPC的船舶电力推进系统仿真不确定性分析
2016-05-06程垠钟
刘 胜 程垠钟
(哈尔滨工程大学自动化学院 哈尔滨 150001)
基于多维gPC的船舶电力推进系统仿真不确定性分析
刘 胜 程垠钟
(哈尔滨工程大学自动化学院 哈尔滨 150001)
摘要为了解决在船舶电力推进系统设计研发过程中面临不确定性因素较多的问题,将广义多项式混沌(gPC)应用到系统仿真的不确定性分析中,并通过张量积将一维的gPC扩展到了多维。通过在一阶随机微分方程中的应用,验证了方法的有效性。在此基础上,对船舶电力推进系统在多个随机变量共同影响下的响应进行了建模、仿真和不确定性分析,得到了系统响应的统计特性。研究结果表明,构建的多维广义多项式混沌能够有效地对船舶电力推进系统在多个不确定因素共同影响下的响应进行定量的不确定性分析。在多个随机变量的共同影响下,系统的动态过程和稳态过程都将受到影响,在过渡过程中将会出现影响最严重的时刻,从而为设计研发提供参考。
关键词:船舶电力推进 仿真 不确定性分析 广义多项式混沌
国家自然科学基金资助项目(51279036)。
0 引言
随着电力电子技术、现代控制理论及其他相关技术的发展,船舶电力推进系统越来越受到世界各国的关注和重视。船舶电力推进使得船舶的推进系统和电力系统有机结合在一起[1],能够给船舶带来一系列优点,包括电能的合理分配、有效仓容的增加、隐身性和舒适性的提高等[2]。然而,与船舶电力推进系统的优点相对应的是在系统设计研发过程中需要面对的诸多不确定性。船舶电力推进系统的推进电机与螺旋桨同轴连接,由于受到随机海浪的影响,作用于电动机轴上的负载转矩也将是随机的,这种不确定性必然会对船舶电力推进系统的运行产生影响[3]。此外,时变的电动机参数,如受温度变化影响的电阻、轴承的摩擦及铁磁材料的饱和等都使船舶电力推进系统的不确定性影响更加严重[4]。
动态仿真的不确定性分析方法适于定量分析包含不确定参数的随机系统,目前已经在陆地电力系统的仿真中得到了一定的应用[5-7],而在船舶电力推进系统这样一个独立的且受不确定性因素影响严重的系统中还没有得到广泛应用。不确定性分析方法主要分为两大类:统计方法和非统计方法。
传统的不确定性仿真分析方法如蒙特卡洛法[8]等存在仿真次数多、仿真时间长的缺点。广义多项式混沌(generalized Polynomial Chaos,gPC)是一种非统计方法,起源于R.G.Ghanem等在解决随机力学的多种问题中在多项式混沌展开方面进行的研究[9]。D.Xiu等在其基础上进行了扩展,从而提出了广义多项式混沌[10],证明了存在最优的正交多项式与不同概率密度的变量相对应,可以根据随机输入确定随机变量的概率密度,根据随机输入的权重函数选择对应的正交多项式。gPC方法目前已经应用在求解随机常微分方程(Ordinary Differential Equation,ODE)、偏微分方程以及计算流体力学的不确定性分析方面[11],在控制理论和电路分析等方面也有初步应用[12,13]。研究结果表明,gPC方法与传统方法相比,能够显著提高分析的效率。国内在gPC方面的研究也已经开展,王晓东等采用该方法求解了随机Burgers方程,介绍了其与流体力学的耦合过程,验证了gPC在随机流动模拟中的有效性[14];韩冬等应用随机响应面法开展了针对陆地电力系统的动态仿真不确定性分析研究[15],随机响应面法也属于gPC方法的应用范畴,其采用了概率配点的方式进行多项式混沌系数的求解,研究结果表明随机响应面法能够克服传统不确定性分析方法的缺点。到目前为止,尚没有文献在多个不确定性参数共同影响下定量地进行系统仿真的不确定性分析。
本文为了解决存在的问题,将gPC方法应用到船舶电力推进系统的动态仿真研究中,并采用张量积构建多维gPC基底,结合Galerkin映射[10]进行多项式混沌系数的求解。通过使用该方法,能够实现对多项式混沌维数的扩展,从而实现对船舶电力推进系统在多个不确定性参数共同影响下的随机响应进行定量分析的目的。
1 广义多项式混沌
对于任意一个二阶随机变量u(ω),都可以使用广义多项式混沌展开表示为


式中,δij为克罗尼克-Δ函数;为Hilbert空间的内积。有
式中,W(ξ)为权函数。
Askey法则中随机变量的概率密度与最优正交多项式的对应关系见表1。

表1 Askey法则不同概率分布对应的正交多项式Tab.1 The correspondent Askey orthogonal polynomial chaos with different probability distribution
在进行实际的数值计算时,需要对多项式混沌展开式进行截断

M取决于随机变量的维数N和正交多项式基底的最高阶数P。M可以通过下式进行计算

在实际系统中,往往包含多个不确定性参数,因此,基本的单变量、一维gPC无法解决多个不确定参数共同影响下系统的响应问题,因此,本文采用张量积的方法将一维的gPC扩展到多维。
在包含多个概率密度函数相同的随机参数的系统中,随机变量的维数N>1,将一维的正交多项式表示为,通过将一维的正交多项式张量化构建多维的多项式混沌
定义N个随机参数的索引,k={k1,…,k1,…,kN},从而得到


在系统存在多个不确定性参数的情况下,利用构建的多维gPC基底,可以将系统中的各个状态表示成式(1)所示的形式,结合Galerkin映射,根据正交性关系式(2)可以求得多项式混沌展开式的系数,在得到系数之后,通过处理便可以得到系统响应的各阶矩,包括均值和方差,可以表示为
通过张量积的构建。可以将一维的多项式混沌扩展到多维,可以实现对包含多个不确定参数的系统的仿真不确定性分析。
2 多维gPC有效性验证
为了对构建的多维gPC进行验证,将其应用到一阶随机微分方程的求解中。考虑一阶随机微分方程



随机微分方程解的均值和方差可以通过下式进行计算

采用多项式混沌对微分方程中的随机变量进行展开,由表可知,均匀分布的随机变量对应的最优多项式为Legendre多项式。一维Legendre多项式的三项递推公式可以表示为

其权函数可以表示为

由于系统包含两个随机参数,根据多维gPC的构建方法,二维的Legendre多项式基底可以表示为

为表示方便,省略上标。随机变量C可以表示为

利用Galerkin映射可以将随机的微分方程转化成确定的微分方程,有,使得任意φ(ζ)∈VΓ和则
将多项式混沌展开式代入式(22)和式(23),根据多项式混沌的正交性,经整理之后可以得到

式中,k=0,…,M;xˆk为多项式混沌的模式;和分别为Legendre多项式的二重和三重内积,可以通过在已知区间内的二重积分求得。
在完成数值积分后,可以根据式(8)和式(9)通过得到的多项式混沌的系数重构随机微分方程解的统计特性,随机微分方程解的均值和方差可以表示为


图1 P=3时得到的不确定性仿真结果Fig.1 Solution of the uncertainty simulation when P=3

图2 P=1~3时解的方差同解析解的比较Fig.2 Variations compared to the analytic solution when P=1 to 3
图1给出了N=2、P=3时求得的多项式混沌的模式,其个数满足式(5)的关系,随着P的增加,其个数将按照指数的趋势增加。图2给出了P=1~3时,不确定性仿真得到的解的方差同解析解的比较,其中“ref”代表解析解得到的结果。可以看出,随着P的增加,通过不确定性仿真得到的方差曲线逐渐向解析解的方差曲线靠近,在P=3时,两者基本吻合,这说明随着多项式混沌阶数P的增大,不确定性仿真的准确度也越来越高,但需要求解的ODE的个数也将大大增加,通过多维gPC在一阶随机微分方程求解中的应用证明了该方法在求解包含多个不确定性参数的系统中的有效性。
3 船舶电力推进系统仿真不确定性分析
为了使用gPC对船舶电力推进系统进行不确定性的仿真,首先需要进行系统的建模,并将模型表示为ODE的形式。本文研究的船舶电力推进系统结构如图3所示[16],其中包括了PWM电压源逆变器(PWM-VSI)、直接转矩控制(Direct Torque Control,DTC)、感应推进电机以及船桨负载。
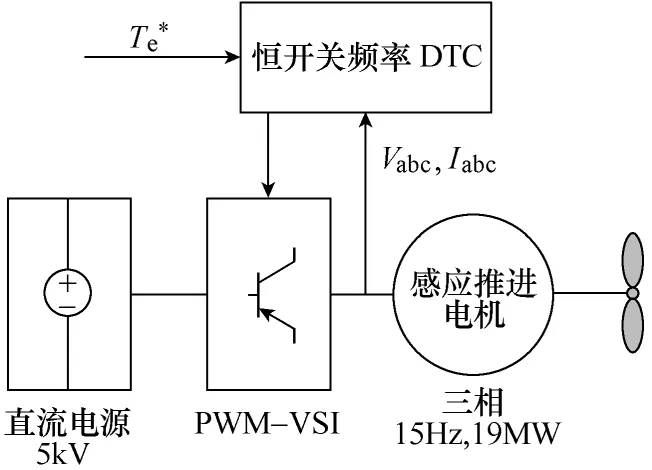
图3 船舶电力推进系统结构示意图Fig.3 Structure of the ship electric propulsion system
感应推进电机的模型建立在定子磁链参考坐标系下,PWM-VSI采用平均值模型[17],输入的PWM脉冲可以使用正弦电压信号进行平均,表示为“mdqs”,感应推进电机的转矩控制采用了恒开关频率DTC方法[18],使用两个PI控制器分别调节感应推进电机的转矩和磁链。螺旋桨的推力系数和转矩系数以及船舶的航行阻力等拟合成表达式的形式,系统的输入包括直流母线电压、DTC系统中感应推进电机的电磁转矩给定和定子磁链给定,船桨负载的输入为感应推进电机的转速,输出为感应推进电机的负载转矩。系统各部分包含的状态变量以及输入、输出关系如图4所示。

图4 船舶电力推进系统各状态变量与连接关系示意图Fig.4 State variables and connections of the ship electric propulsion system
经过推导,得到系统的七阶ODE模型为

式中

式中,λs、λrd、λrq和ωm分别为感应推进电机的定子磁链、转子d轴和q轴磁链以及转速;xT,xλ为DTC控制中转矩控制和磁链控制引入的内部状态变量;vs为船舶的航速;KLP、KLI、KTP和KTI分别为转矩控制器和磁链控制器的PI参数;J为转动惯量;p为感应推进电机的极对数;KT和KQ分别为螺旋桨的推力系数和转矩系数;td为推力减额系数;ρ为海水的密度;D为螺旋桨的直径;Fr为船舶的航行阻力;m和ma分别为船舶的质量和附加质量。
船舶电力推进系统中的推进电机为三相、19MW的感应电动机,系统各部分的参数如下[19]。
(1)感应推进电机参数
Rs=27mΩ,Rr=8mΩ,fb=15Hz,Lls=1.5mH,Llr=1.7mH,Lm=31.7mH,p=6。
(2)船桨负载参数
D=5.5m,ρ=1 025kg/m3,m=1.327×107kg,ma=1.08。
随机海浪的扰动以及温度等环境的变化将直接对系统的参数产生影响。首先,感应推进电机的转子电阻受到温度的影响非常严重,其最大的变化范围可以达到其原始测量值的100%[20];其次,船舶电力推进系统的推进电机和螺旋桨同轴相连,其转动惯量由感应推进电机的转动惯量和螺旋桨的转动惯量两方面构成,随机海浪的扰动会给螺旋桨的旋转带来附加的转动惯量,约在其原始值的0.3倍左右[21,22],本文假设感应推进电机的转子绕组Rr在其平均值的±30%范围内均匀分布,转动惯量J在其平均值的±40%范围内均匀分布,由于温度和海浪的随机干扰没有关联,使得转子绕组电阻和转动惯量相互独立。
仿真的工况为在初始时刻时以20kN·m/s的速度给定磁转矩,在50s时给定电磁转矩达到1 000kN·m时保持稳定,仿真共200s,不确定性仿真的多项式混沌阶数P=7,则经过二维Legendre多项式混沌展开之后,系统将包含252个ODE,通过数值积分算法对252个ODE进行数值积分求解,求解完成后对数值解进行重构可以得到各状态变量以及输出的均值与方差,仿真结果如图5~图9所示。

图5 电磁转矩仿真结果Fig.5 Simulation result of the electromagnetic torque

图6 定子磁链仿真结果统计特性Fig.6 Simulation results of the stator flux

图7 感应推进电机转速仿真结果统计特性Fig.7 Simulation results of the motor rotational speed

图8 船舶航速仿真结果Fig.8 Simulation results of the ship speed
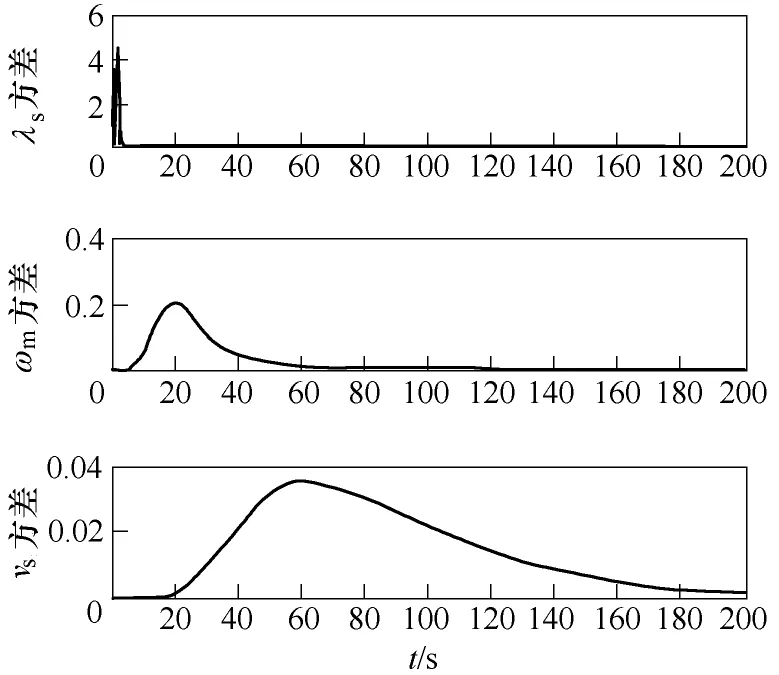
图9 船舶航速仿真结果Fig.9 Simulation results of the ship speed
图5给出了电磁转矩的仿真结果曲线,可以看出,电磁转矩跟随给定值,从0时刻以20kN·m/s的速度增加,到50s时达到1 000kN·m并保持稳定。图6分别给出了定子磁链仿真结果统计特性的全过程和局部曲线,图7和图8给出了感应推进电机和船舶航速仿真结果的统计特性曲线,包括了均值、以及均值加减标准差。可以看出,由于磁链控制器的作用,定子磁链迅速达到稳定,在电磁转矩的上升阶段,电动机的转速迅速上升,当电磁转矩达到并保持稳定之后,电动机转速增幅变小,逐渐趋于稳定;船舶的航速由于惯性时间常数较大,在经过了一段快速上升的过程后逐渐趋于稳定。从统计特性可以看出,两个不确定性参数对状态变量的动态过程和稳态过程都将产生影响,其中动态过程中影响较大,进入稳态后影响较小。图9给出了仿真全过程中电动机定子磁链、转速和船舶航速的方差曲线,通过方差曲线可以看出,状态变量的动态过程中方差较大,进入稳态后逐渐减小,这也与图6~图8得到的结果吻合;还可以看出,方差在从动态过程即将进入稳态时将出现一个最大值,此时,系统随机响应在平均值上下的波动将最为严重,不确定性的参数对系统的影响也最为严重,得到的定量的不确定性分析结果能够为系统的设计研发提供参考。
4 结论
在设计研发阶段,由于船舶电力推进系统所面临的不确定性因素较多,利用传统的仿真不确定性分析手段将会使得整个设计研发过程效率低。本文在传统的一维gPC的基础上,利用张量积构建了多维的gPC,通过其在一维随机微分方程中的应用提出了利用构建的多维gPC进行多个不确定性因素共同影响下不确定性分析的方法和流程,并验证了方法的有效性。基于该方法进行了船舶电力推进系统的动态仿真不确性分析,得到的结果能够直接应用到船舶电力推进系统的设计研发中,解决系统受不确定性因素影响较多的问题。
参考文献
[1]Young S,Newell J,Little G.Beyond electric ship[J].Naval Engineers Journal,2001,113(4):79-92.
[2]王淼,戴剑锋,周双喜,等.全电力推进船舶电力系统的数字仿真[J].电工技术学报,2006,21(4):130-137.Wang Miao,Dai Jianfeng,Zhou Shuangxi,et al.Digital simulation of ship power system with electric propulsion[J].Transactions of China Electrotechnical Society,2006,21(4):130-137.
[3]刘胜,张玉廷,余晨光.船舶电力推进系统电机组三维模糊控制[J].中国电机工程学报,2012,32(3):117-123.Liu Sheng,Zhang Yuting,Yu Chenguang.Threedimensional fuzzy control for ship electric propulsion turbine[J].Proceedings of the CSEE,2012,32(3):117-123.
[4]Krause P C,Wasynczuk O,Sudhoff S D.Analysis of electric machinery and drive systems,second edition[M].New York:IEEE Press and Wiley-Interscience,2002.
[5]董雷,杨以涵,张传成,等.综合考虑网络结构不确定性的概率潮流计算方法[J].电工技术学报,2012,27(1):210-216.Dong Lei,Yang Yihan,Zhang Chuancheng,et al.Probabilistic load flow considering network configuration uncertainties[J].Transactions of China Electrotechnical Society,2012,27(1):210-216.
[6]段玉兵,龚宇雷,谭兴国,等.基于蒙特卡罗模拟的微电网随机潮流计算方法[J].电工技术学报,2011,26(1):274-278.Duan Yubing,Gong Yulei,Tan Xingguo,et a1.Probabilistic power flow calculation in microgrid based on Monte-Carlo simulation[J].Transactions of China Electrotechnical Society,2011,26(1):274-278.
[7]赵渊,沈智健,周念成,等.大电网可靠性蒙特卡洛仿真的概率不确定性分析[J].中国电机工程学报,2008,28(28):61-67.Zhao Yuan,Shen Zhijian,Zhou Niancheng,et al.Probabilistic uncertainty analysis of Monte-Carlo simulation for bulk power system reliability evaluation[J].Proceedings of the CSEE,2008,28(28):61-67.
[8]Fishman G S.Monte Carlo:concepts,algorithms,and applications[M].New York:Springer-Verlag Inc,1996.
[9]Ghanem R G,Spanos P D.Stochastic finite elements:a spectral approach,revised edition[M].USA:Dover Publications,2003.
[10]Xiu D,Karniadakis G E.The Wiener-Askey polynomial chaos for stochastic differential equations[J].SIAM Journal on Scientific Computing,2002,24(2):619-644.
[11]Xiu D,Karniadakis G E.Modeling uncertainty in flow simulations via generalized polynomial chaos[J].Journal of Computation Physics,2003,187(1):137-167.[12]Hover F S,Triantafyllou M S.Application of polynomial chaos in stability and control[J].Automatica,2006,42(5):789-795.
[13]Lovett T E,Monti A,Ponci F.Automatic synthesis of uncertain models for linear circuit simulation:a polynomial chaos theory approach[J].Simulation Modelling Practice and Theory,2008,16(7):796-816.
[14]王晓东,康顺.多项式混沌方法在随机方腔流动模拟中的应用[J].中国科学E辑:技术科学,2011,41(6):790-798.Wang Xiaodong,Kang Shun.Application of polynomial chaos on numerical simulation of stochastic cavity flow[J].Science China Technological Sciences,2011,41(6):790-798.
[15]韩冬,马进,贺仁睦,等.基于随机响应面法的电力系统仿真不确定性分析[J].电力系统自动化,2011,35(24):l2-16.Han Dong,Ma Jin,He Renmu,et a1.Uncertainty analysis based on stochastic response surface method in power system simulaton[J].Automation of Electric Power Systems,2011,35(24):l2-16.
[16]Bash M,Chan R R,Crider J,et al.A medium voltage DC testbed for ship power system research[C]//Electric Ship Technologies Symposium,2009:560-567.
[17]Rim C T,Choi N S,Cho G C,et al.A complete DC and AC analysis of three-phase controlled-current PWM rectifier using circuit DQ transformation[J].IEEE Transactions on Power Electronics,1994,9(4):390-396.
[18]Xue Y,Xu X,Habetler T G,et al.A low cost stator flux oriented voltage source variable speed drive[C]//Conference Record of the IEEE Industry Applications Society Annual Meeting,1990:410-415.
[19]Marden M M,Prempraneerach P,Kirtley J L,et al.An end-to-end simulator for the all-electric ship MVDC integrated power system[C]//Proceedings of the 2010 Conference on Grand Challenges in Modeling& Simulation,Society for Modeling & Simulation International,2010:136-143.
[20]Francois B,Degobert P,Hautier J P.Vector control of induction machines:desensitisation and optimisation through fuzzy logic[M].Springer,2012.
[21]孙洪波.螺旋桨逆转工况下船舶运动建模与仿真[D].大连:大连海事大学,2007.
[22]Prempraneerach P,Kirtley J,Chryssostomidis C,et al.Stochastic modeling of integrated power system coupled to hydrodynamics in the all-electric ship[C]//IEEE International Symposium on Power Electronics,Electrical Drives,Automation and Motion,2008:563-568.
刘 胜 男,1957年生,教授,博士生导师,研究方向为随机系统最优估计与控制、船舶电力推进和复杂性科学等。
E-mail:cyz410410@163.com
程垠钟 男,1987年生,博士研究生,研究方向为船舶综合电力推进系统的建模与仿真。
E-mail:cyzelvis@163.com(通信作者)
Uncertainty Analysis for Simulation of Shipboard Electric Propulsion System Based on Multi-Dimensional gPC
Liu Sheng Cheng Yinzhong
(College of Automation Harbin Engineering University Harbin 150001 China)
AbstractIn order to analyze the influence of many uncertain factors on the design stage of shipboard electric propulsion systems,gPC was applied in the uncertainty analysis of system simulation.A method to construct multi-dimensional gPC from one-dimension gPC by tensor product was adopted in this paper.By applying the method in the first-order stochastic differential equation,the efficiency of the proposed method was validated.Then,uncertainty analysis of the simulation for the shipboard electric propulsion systems arising from two independent random variables was analyzed.The statistical properties of variables were obtained.The results showed that the proposed method can simulate and analyze the performance of the shipboard electric propulsion system affected by multiple uncertain factors effectively.The dynamic and steady-state performance of the system will be affected by the random variables.The largest impact appears when the system is about to steady-state from dynamic process,which can provide reference for design and development.
Keywords:Shipboard electric propulsion,simulation,uncertainty analysis,generalized polynomial chaos
作者简介
收稿日期2013-10-22 改稿日期 2013-12-05
中图分类号:TM743