智能稀释水阀中关键问题的研究
2015-12-25刘文波王孟效
刘文波, 王孟效
(陕西科技大学 电气与信息工程学院, 陕西 西安 710021)
智能稀释水阀中关键问题的研究
刘文波, 王孟效
(陕西科技大学 电气与信息工程学院, 陕西 西安710021)
摘要:针对在横向定量控制系统中由于智能稀释水阀横向安装间距窄小及数目众多等特点导致的研制难点,从阀体选择、电机选择、结构设计、数据交换方面对关键问题进行了阐述,并给出了解决方法,有助于设计出尺寸紧凑、高精度、散热良好、性能可靠的智能稀释水阀,从而有效改善纸张横向定量分布的均匀度.
关键词:智能稀释水阀; 横向定量; 数据交换
0引言
纸机横向控制的概念于上世纪五十年代提出,受限于当时纸幅窄以及测控技术低等条件,并没有取得大的发展.随着纸幅的增加、车速的提高,特别是用户对纸张质量的要求越来越高,横向控制技术获得越来越多的重视[1].在横向控制中包括对定量、水分、厚度等指标的控制,其中对横向定量的控制尤为重要.传统的横向定量控制方法主要采用唇板配曲调节的方式,即通过微调机构调节喷浆唇板开度大小,从而实现横向定量均匀一致.此方法存在着调节精度差、灵敏度和分辨率较低的缺点[2].
随着稀释水流浆箱的出现,基于稀释水流浆箱的横向定量控制系统逐渐得到了应用,其突破了传统的唇板配曲调节方法,采用分区浓度调节的方法调节横向定量,可以使成品纸张的横幅定量差比传统的方式减少50%~80%[3].
作为浓度调节执行机构,稀释水阀在横向定量控制中有着重要作用.在经历了手动、电动等阶段后,稀释水阀逐渐向自动化、智能化发展.作为一种高集成度、高自动化程度、高执行精度的机电一体化设备,智能稀释水阀研制的难度相对较大.
目前在国内造纸工业中,国外厂商的稀释水阀往往与流浆箱、横向定量控制系统配套销售,价格及后续服务费用较高,造纸企业在采用其产品时,总体拥有成本较高.国内也有部分研究院所及企业从事此方面的研究,但存在尺寸较大、易发生过热死机等问题.在当前造纸工业发展及结构调整的背景下,国内对于稀释水流浆箱有较大需求,根据幅宽不同,每台稀释水流浆箱需配置数十至数百只稀释水阀,对智能稀释水阀的需求量很大.因而研制高性价比的智能稀释水阀在国内具有广阔的市场前景.
1智能稀释水阀设计难点
稀释水流浆箱通过安装在横幅方向的稀释水调节装置,对局部浆料浓度进行调节,实现横向定量的均匀调节[4].典型的稀释水横向定量控制系统结构如图1所示.为实现自动调节,首先横向定量控制系统通过扫描传感器检测纸张横向定量数据,进而运行控制算法得到控制量,然后输出至智能稀释水阀,调整稀释水流量,从而实现局部浆料浓度的改变,最终达到对横向定量进行自动调节控制的目的.
在此结构中,智能稀释水阀作为调节机构,作用至关重要.从本质上来看,智能稀释水阀是一种电动调节阀,由于应用于横向定量调节,其具有特定的功能,在此应用场合,其具有如下特点,也导致研制中的难点.

图1 稀释水横向定量控制系统组成
(1)横向安装间距窄小
如图1所示结构中,稀释水阀安装在流浆箱的横幅方向,在幅宽一致的情况下,横向安装的稀释水阀数目越多,其空间分辨率就越高,随之而来的是控制精度的提高.目前所通用的横向安装中心间距一般为60mm.同时,由于要考虑到操作空间、散热、后期维护等因素,相邻两个稀释水阀之间还应保留部分空间,因此对于智能稀释水阀的横向尺寸提出了要求,一般不应超过55mm.
智能稀释水阀可分为阀体及执行机构两部分.相对而言,阀体为纯机械结构,内部并无电子元件等,故其所受尺寸制约相对较小.而执行机构为机电一体化结构,内部结构较为复杂,一般而言包括控制板、步进电机、减速机构等,考虑到现场防水要求,它们被安装在执行机构密闭壳体内.在正常运行时,步进电机及控制板会散发热量.由于尺寸的限制,其内部空间较为狭小,当由于发热引起温度升高到一定程度后,会导致控制板元件无法稳定工作,从而造成执行机构死机、失灵等现象.
(2)稀释水阀数目众多
当前纸幅宽度越来越大,国际上已有幅宽达10.45m的纸机[5],国内也有幅宽8.1m的纸机[6].以60mm安装中心间距计算,需要安装160个智能稀释水阀.为了实施控制,这些稀释水阀需要与横向定量控制系统连接,若采用传统的模拟连接方式,则需要大量连接电缆.除了成本上的增加、施工难度加大,还存在易发故障、不易排查检修等隐患.因而可考虑采用总线连接的方式,即在智能稀释水阀上设计串行通信接口,通过其与横向定量控制系统互联,所有的数据通过通信方式进行交换,只需采用单根四芯屏蔽电缆即可,其中电源线、通讯线各两芯.为了保证正常通信,在距离较远、节点较多的情况下还应考虑加入通信中继器.
结合以上特点,智能稀释水阀的总体结构可采用图2所示方案,其研制中的关键问题主要在于阀体选择、电机选择、结构设计、控制器设计方面.

图2 智能稀释水阀总体结构
2阀体选择
稀释水阀的选择直接关系到稀释水调节的特性,一般地,阀门的理想流量特性可以分为等百分比、线性、快开和抛物线等流量调节特性[7,8],如图3所示.在阀门同样开度变化下,等百分比特性表现为流量较小时,调节缓和平稳;流量较大时,调节灵敏有效.直线特性表现为流量较小时,调节作用较强,易超调、振荡;流量大时,调节不够灵敏.抛物线特性表现介于两者之间.而快开特性则表现为可调节范围偏小、易饱和[9].

图3 阀门理想流量特性
在稀释水横向定量调节中,由于调节是通过稀释水的添加改变局部进浆浓度实现的,这就要求为获得稳定的调节效果,稀释水流量在整个调节过程中平稳变化、精度一致,应选用具有等百分比特性的阀门;且在实际生产中添加的稀释水一般为低浓度白水,其中含有纸浆纤维,还应考虑到阀的防堵塞.
V形阀在工业生产中含有纤维介质的流体系统中得到了非常广泛的应用[10],其具有等百分比特性,调节精度高,且在转动时可产生剪切力,对流体介质产生剪切作用,防堵塞能力较强.因此,结合稀释水调节的需求,可选择采用V形阀,阀门通径一般可选择为DN20[11].
实际中由于工作条件的影响,V形阀的实际流量特性与理想流量特性有一定的差异,此时,可采用两种方法进行调整.其一是重新设计阀芯结构,另一种方法是通过软件方法进行补偿.前者需要改变硬件结构,且当工作条件(如流体流速、压力等)变化时,实际流量特性可能会再次偏离,有一定局限性;后者由软件编程实现,较为灵活,可根据工作条件采用不同的补偿算法.
以如图4所示的实际流量特性及理想等百分比流量特性为例,假定其特性曲线分别可用公式(1)、(2)表示:
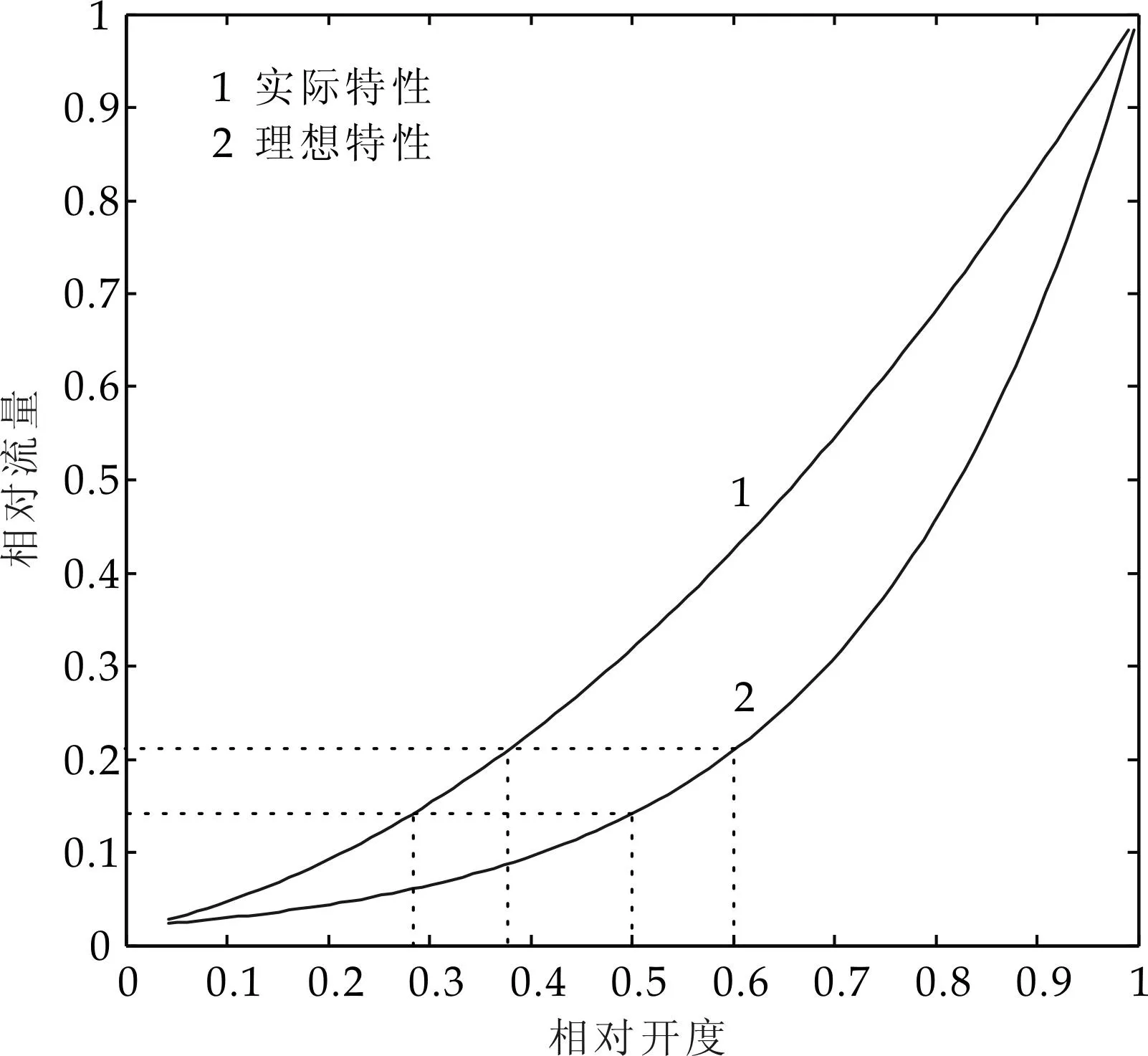
图4 阀门特性补偿
Q/Qmax=f1(l/L)
(1)
Q/Qmax=f2(l/L)=R(l/L-1)
(2)
其中Q为流量,Qmax为最大流量,Q/Qmax为相对流量,l为开度,L为最大开度,l/L为相对开度,R为可调比.
利用算法补偿的目的是使其特性接近于理想特性,补偿方法如下:
① 在理想特性曲线上取10个工作点,分别对应相对开度10%、20%、30%、40%、50%、60%、70%、80%、90%、100%,根据公式(2),分别求解它们所对应的相对流量;
② 根据①中所得的相对流量值,利用公式(1)求解实际流量特性所对应的相对开度;
③ 根据①、②中的数据,可得表1所示补偿数据;
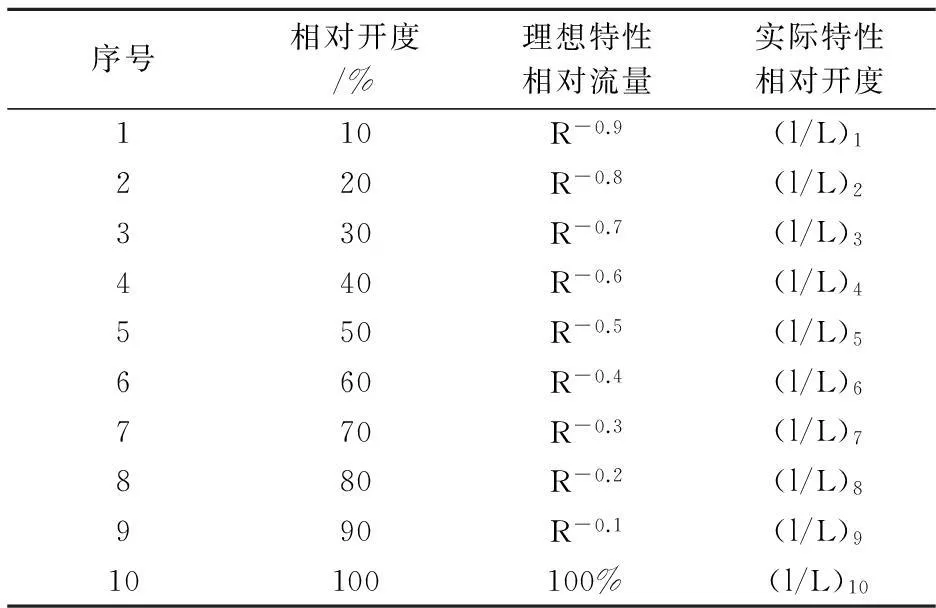
表1 阀特性补偿数据
④ 由于表1中相对开度给定来自于横向定量控制系统阀位输出量,在此可利用三次多项式对表1中理想特性相对开度与实际特性相对开度的10组数据进行拟合,由此可得到拟合多项式(3).
l/L=a×Sp3+b×Sp2+c×Sp+d
(3)
其中a、b、c、d为多项式系数,经过拟合后为已知参数;Sp为阀位输出量,l/L为经过补偿后阀的实际相对开度.
经过上述拟合,即可实现对实际特性的补偿.
3执行机构设计
执行机构用于驱动阀门动作,由电机、控制器两部分组成.设计中的难点主要在于电机的选择、电机及控制器的发热与防水、与横向定量控制系统上位机之间的数据交换等.
3.1电机选择
在驱动稀释水阀时,一般采用直流步进电机.在选择具体电机时,除应满足稀释水阀的驱动转矩需求外,还应满足空间尺寸要求.
从实际应用情况来看,国际上不同厂家稀释水阀在驱动转矩方面有不同指标,如霍尼韦尔为18N·m(DN25),美卓及福伊特为20N·m(DN20).考虑到稀释水阀安装空间较小,可选择座号规格为42或以下系列两相四线混合式步进电机.以42系列步进电机为例,根据电机长度的不同,其静力矩一般在0.1~0.8N·m之间,不足以直接驱动稀释水阀,还应当加装减速器对力矩进行放大.在确定电机静力矩及减速比时,可按照如下公式:
TH×R≥TL
(4)

(5)
其中TH为电机静力矩,TL为阀的驱动转矩,R为减速器的减速比,θ为步进电机步距角,Θ为阀门从全关到全开的角度,M为采用细分驱动时的细分数,S0为定位精度所对应的步数.
若选择静力矩为0.48N·m的步进电机,取TL=20N·m,根据公式(4),则至少应采用减速比R为42以上的减速器.但随着减速比的增大,传动的均衡性将会受到影响,且减速器体积也会相应增大.因此,综合考虑可选择减速比为50的减速器.
根据公式(5),在角度Θ一定的前提下,选定减速比R后,步距角θ越小、细分数M越大,则阀门定位精度越高,国外厂商产品定位精度可达10 000步.在实际中,42系列两相步进电机步距角θ一般为0.9 °、1.8 °.若取θ=1.8 °、Θ=90 °、定位精度S0为10 000步,则由公式(5)可知,为满足定位精度需求,应采用细分驱动技术,且细分数M=4.
3.2结构设计
稀释水流浆箱位于造纸生产线湿部,所处环境湿度较大,在防水方面对执行机构有较高要求,一般而言应具有IP65以上的防护等级.同时,为避免执行机构因运行过程中元器件的发热导致不稳定,执行机构应具有良好的散热性能.除此之外,由于安装间距较为狭小,执行机构尺寸不应过大.综上考虑,可采用平行结构和共轴结构两种布局方式.
(1)平行结构
如图5所示,此结构特点在于的步进电机与电路板平行放置,适合于纵向安装空间较大的应用场合.为保证防护等级,执行机构壳体采用密闭式结构,壳体材料采用304不锈钢,相对于塑料具有更为优异的性能,整体外形尺寸为50×100×100(宽×高×深)mm,结构紧凑小巧.执行机构内装有双出轴步进电机,阀位反馈装置及减速器分别与电机上、下端出轴采用共轴方式进行连接.减速器输出轴从执行机构壳体底部伸出,并与阀杆采用联轴器共轴连接,壳体与阀体之间采用法兰连接.控制电缆通过防水插头连接至壳体,控制电路板在壳体内部平行于电机轴线安装,由于内部空间较大,同时步进电机、控制电路板电机驱动芯片分别与壳体之间紧密贴合,可采用壳体本身来进行散热,因此具备良好的散热性能.
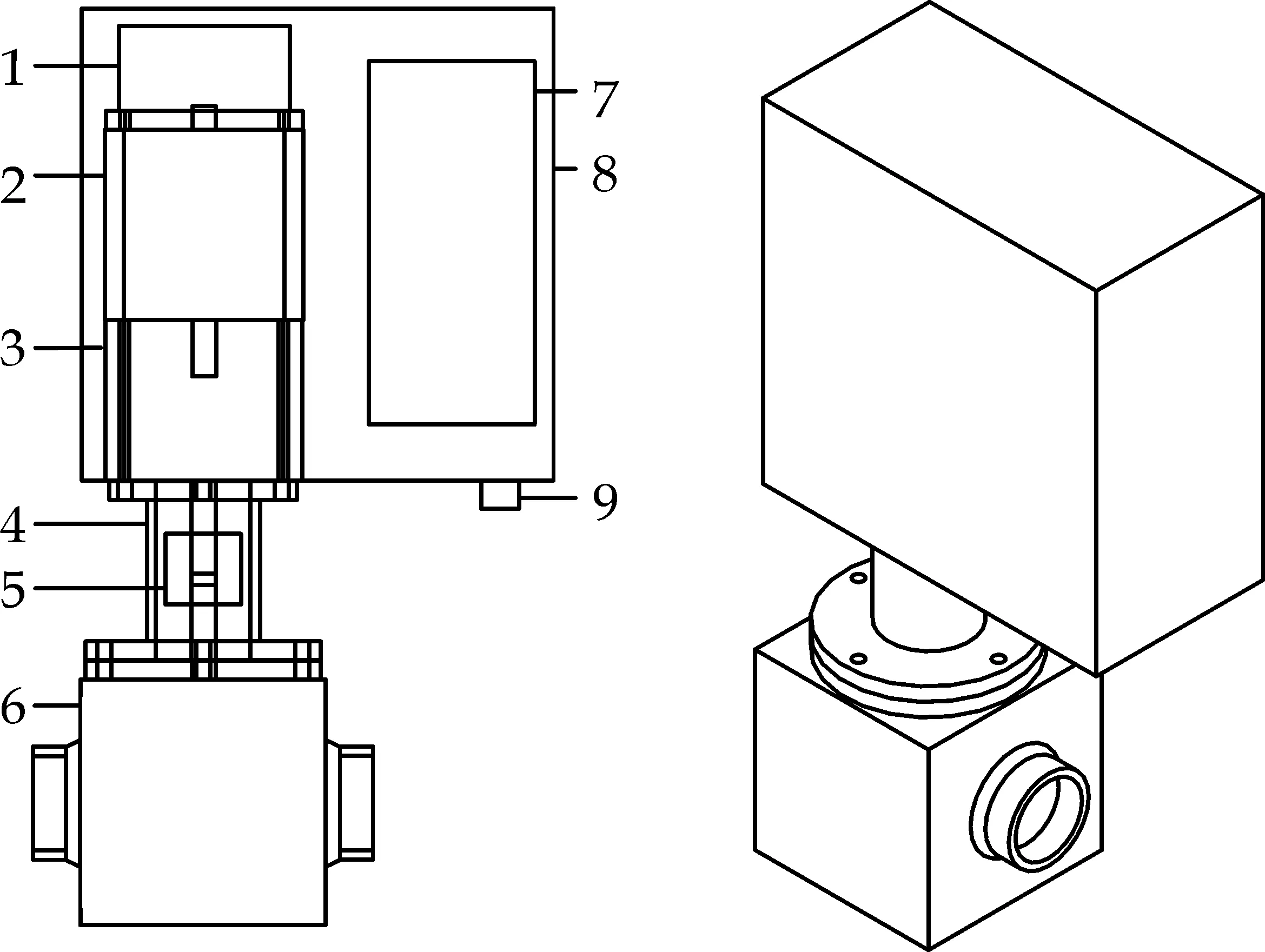
1.阀位反馈装置 2.步进电机 3.减速器 4.连接法兰 5.联轴器 6.阀体 7.电路板 8.外壳 9.防水插头图5 执行机构平行结构
(2)共轴结构
如图6所示,此结构与平行结构的不同在于电路板与安装于电机轴线顶部,在垂直方向尺寸较大,而横向及纵向安装较小,适合于垂直方向安装空间较大的应用场合.壳体整体外形尺寸为50×180×50(宽×高×深)mm.由于尺寸紧凑,壳体内部空间较小,控制电路板分为上下层布局.其中下层电路板为核心控制板,主要包括单片机及其他外围元器件,上层电路板为驱动板,主要包括步进电机驱动芯片及外围元器件.运行过程中产生的热量可通过壳体向外散发,散热性能良好.

1.防水插头2.上层电路板 3.下层电路板 4.阀位反馈装置 5.步进电机 6.减速器 7.连接法兰 8.联轴器 9.阀体图6 执行机构共轴结构
3.3控制器设计
控制器的作用在于接收横向定量控制系统发送的控制命令集数据,然后驱动步进电机改变阀门开度,从而对稀释水流量进行调整,最终实现对横向定量的调节.在控制器的设计中需考虑如下诸多因素.
(1)控制方式
横向定量控制中,稀释水与流浆箱总压间需维持一定差压才能将稀释水加入流浆箱.在纸机运行过程中,差压的波动会导致稀释水对阀芯的冲击,相当于步进电机驱动负载波动.且根据横向缓慢时变的特性,实际中步进电机并非连续运转,而是在横向定量控制系统控制下,重复执行启动、加速、减速、停止操作,此过程中易产生震荡及丢步现象.故为了提高控制精度,可增加步进电机位置反馈装置,采用闭环控制的方式.
(2)过流保护
实际运行中可能会出现稀释水阀堵转的情况,会导致电机过流,严重情况下会损坏步进电机及控制器,影响执行机构的正常工作.因此,还应考虑过流保护.
(3)电机位置保持
由于稀释水与纸浆之间存在差压,在电机停止时,稀释水会对阀芯产生驱动扭矩,若不采取位置保持措施,则可能造成稀释水阀位置漂移,对控制精度造成影响.因而在驱动电路中需采取位置保持措施.
(4)数据交换
执行机构与上位机之间通过总线的方式进行连接及交换数据.因而在硬件电路中设计通讯接口,并编写通讯协议,从而实现数据交换.
综合以上考虑,可采用以AT89S52单片机为控制核心,以专用驱动芯片THB6128[12,13]为步进电机驱动,具有过流保护功能,带有编码器信号输入端口,以及RS485串行接口[14]的设计方案.其硬件结构如下:

图7 执行机构硬件结构
图7中供电电路用于为执行机构提供电源;看门狗电路采用X5045芯片,用于防止程序跑飞,提高系统可靠性;RS485接口电路采用MAX487E芯片,用于将执行机构接入通讯网络中;位置反馈部分用于接收正交脉冲信号,获取当前的反馈阀位,从而实现对阀位的闭环控制;过流保护部分用于在电机过流时实施保护动作;单片机则采用AT89S52,其主要功能是通过串行通讯接口接收来自于横向定量控制系统的控制命令及数据,并相应的执行驱动步进电机、阀位数据反馈等功能.
步进电机驱动电路是控制器核心之一,可采用分立元件也可采用专用驱动芯片.考虑到可靠性及结构尺寸的需求,在此采用专用驱动芯片THB6128.其工作电压为9~36V,最大输出电流2A,具有细分驱动、自动半流、过流及过热保护功能,可驱动57系列以下步进电机.在THB6128工作时需要至少3个控制信号:方向(CW/CCW)、脉冲(CLK)、脱机(ENABLE),其中方向信号用于控制电机转动方向,脉冲信号用于驱动步进电机转动,电机转速则取决于脉冲信号频率,脱机信号用于控制电机在停止时是否具有保持力矩.若需要提高控制精度、减少振动,可以采用细分驱动模式,需要连接细分控制信号(M1,M2,M3).
在控制器工作时,由于壳体内空间狭小,发热会导致控制器工作不稳定、死机等现象.为减少发热造成的影响,可利用THB6128芯片的自动半流功能,即在电机转动时,输出正常驱动电流,而在电机静止时,使芯片工作于半流状态,在起到保持电机位置作用的同时,还可有效降低控制器及电机静态功耗,减少发热.在实际应用中,通过自动半流以及对静态电流进行微调,可使得控制器工作电流小于100mA,在长时间工作情况下也能保证芯片温度处于正常工作温度范围内,有效的提高了系统稳定性.
为解决与横向定量控制系统之间的数据交换问题,在执行器控制板上设计了串行通信接口,通过总线方式与上位机进行连接,并采用自定义通信协议,具体如下:
首先,执行器与上位机之间采用RS485总线进行连接,其网络结构如图8所示.

图8 通信网络结构图
对于RS485总线而言,当串口输入阻抗为12kΩ时,可驱动的标准节点数为32个,在输入阻抗分别为1/2负载(≥24kΩ)、1/4负载(≥48kΩ)时,则分别可驱动64个、128个节点.由于在横向定量控制系统中,执行器数量众多,若将所有执行器直接连接至同一总线上,可能导致串口通信不稳定甚至故障.因此,在本通信网络中,从两方面提高能驱动的节点数,一方面是在执行机构设计时采用输入阻抗为1/4负载的串口芯片(MAX487E);另一方面,采用RS485集线器,其提供多个输出端口,每个端口可驱动32个标准节点或128个1/4负载节点,共计可以驱动32×N(N为端口数)个标准节点或128×N个1/4负载节点,可以满足实际使用要求.
其次,在数据交换过程中,由横向定量控制系统上位机主动发起通信,执行器控制板采用中断方式接收数据并响应,其流程如图9所示.
然后,在通信协议的实现上,参照OSI(OpenSystemInterconnection,开放系统互联)[15]七层模型,利用其中三层,即物理层、数据链路层以及应用层实现自定义通信协议.
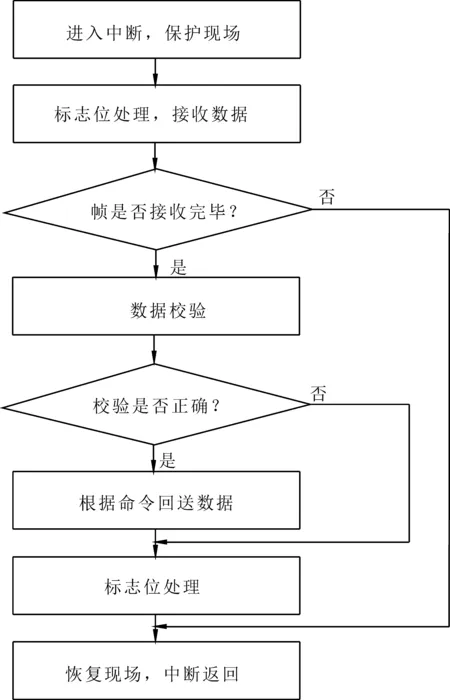
图9 串口中断服务子程序流程
① 物理层
采用RS485接口标准,波特率9 600bps,1位起始位,8位数据位,无奇偶校验,1位停止位.
② 数据链路层
采用主/从方式,由主机发起通信,从机等待主机请求并响应.横向定量控制系统的上位机作为主机,执行机构为从机.主机采用点播及广播方式与从机通信,数据帧的传输采用RTU(RemoteTerminalUnit,远程终端单元)模式,每帧数据包含6个字节,帧格式如表2所示.

表2 数据帧格式
根据功能,数据帧可分为请求、响应及错误帧.其中请求帧由主机发出,响应帧和错误帧由从机发出.主机发送请求帧后,需等待从机响应才能发送下一请求帧,若等待超时,则放弃等待,转而发送下一请求帧;若执行机构出现错误,则响应错误帧.
③ 应用层
在数据帧中,地址字段作为执行机构唯一标识,范围从1到255,地址0为广播地址;命令字段表示主机命令,范围从1到127;数据字段为2字节,根据不同的数据帧而有不同的内容,主要命令及数据如表3所示;校验字段包含对地址、命令、数据字段的16位CRC(CyclicalRedundancyCheck,循环冗余校验)信息,用于检验数据传输是否出错.

表3 主要命令及数据
例如地址为2的执行机构所对应的稀释水阀当前开度为50.00%,为获取其开度,主机与执行机构之间的数据交换内容如表4所示.

表4 获取开度时的数据帧
4结论
随着稀释水流浆箱在造纸生产线中越来越广泛的应用,对与之配套的智能稀释水阀的需求也越来越多.本文从阀体选择、执行机构设计等方面针对其设计中的关键问题进行了探讨:
(1)采用V型阀作为阀体,并通过软件算法针对流量特性进行补偿,从而解决阀体选择问题;
(2)采用两相混合步进电机,利用细分驱动技术提高驱动精度,并给出了相关参数选择方法.给出了平行结构及共轴结构两种执行机构设计结构,以解决对于尺寸、散热、密封等方面的要求;
(3)在控制器设计中,采用闭环控制方式,增加阀位反馈,进一步提高控制精度.以单片机为控制核心、采用专用驱动芯片THB6128、结合自动半流技术,解决电机驱动、散热、过流保护等问题,并利用RS485网络及自定义通信协议解决数据交换问题.
通过对以上问题的解决,可为智能稀释水阀的设计提供一定参考,在应用于横向定量控制系统时,可有效改善纸张横向定量分布的均匀度.
参考文献
[1]刘文波,王樨,汤伟,等.稀释水横向定量控制系统的研究与应用[J].中国造纸, 2014,33(8):1-6.
[2]石先城,冯郁成,陈克复,等.OPC技术在稀释水横幅定量控制系统数据通信中的应用[J].中华纸业,2013,32(14):25-28.
[3]林美婵.MC稀释水型水力式流浆箱关键技术的开发[J].中国造纸,2010,29(3):56-58.
[4]康国兵.稀释水在布浆支管中的混合特性研究[J].广东轻工职业技术学院学报,2014,13(1):1-5.
[5]黄莉.新技术在造纸机上的应用[J].西南造纸,2006,35(3):32-34.
[6]钟华.APP金桂浆纸白纸板生产线打破同类纸机运行车速世界纪录[J].中华纸业,2015,36(3):80.
[7]杨海燕,侯顺利,牛绪中.稀释水水力式流浆箱的控制探索[J].纸和造纸,2013,32(4):4-7.
[8]卫红.调节阀流量特性变化对调节精度的影响[J].中国氯碱,2014(7):44-46.
[9]姚晓春.V形调节球阀的数值模拟及结构优化[D].兰州:兰州理工大学,2009.
[10]孙丰位.V形调节球阀阀芯结构与等百分比流量特性分析[D].兰州:兰州理工大学,2012.
[11]姜丰伟.流浆箱改造与稀释水流浆箱[J].中国造纸,2009,28(11):67-68.
[12]赵立辉,霍春宝.基于FPGA的步进电机多轴联动控制系统[J].电机与控制应用,2013,40(11):40-45,58.
[13]姬起群,施火泉.电动式电子膨胀阀控制系统的设计[J].微特电机,2012,40(3):64-65,68.
[14]李飞.一种RS-485总线发送器的设计[J].微电子学,2014,44(6):803-807,812.
[15]毛鹏,李颖,李健,等.遵从OSI体系的CIM数据一致性测试框架研究[J].电工电能新技术,2013,32(2):68-71,86.

Studyonkeyproblemsofsmartdilutionwatervalve
LIUWen-bo,WANGMeng-xiao
(CollegeofElectricalandInformationEngineering,ShaanxiUniversityofScience&Technology,Xi′an710021,China)
Abstract:In dilution water cross direction basis weight control system,the characteristics of narrow horizontal installation space and large quantity of smart dilution water vale lead to difficulties in its design.Aimed to this problem,the key problems of valve selection,motor selection,structure design and data exchange were expounded,and the solutions were given, which could help to design the smart dilution water valve with compact size,high precision, good cooling performance and reliable performance,thus effectively improving the paper formation of cross direction.
Key words:smart dilution water valve; cross direction basis weight; data exchange
中图分类号:TP273+.5
文献标志码:A
文章编号:1000-5811(2015)05-0171-07
作者简介:刘文波(1981-),男,湖北天门人,讲师,博士,研究方向:控制理论与控制工程
基金项目:陕西省科技厅科技计划项目(2014K05-03); 陕西科技大学博士科研启动基金项目(BJ11-07)
收稿日期:*2015-08-11
