模块化多电平换流器无锁相环的环流抑制控制策略
2015-11-22宋平岗
何 峰,宋平岗
(华东交通大学电气与电子工程学院,江西 南昌330013)
随着我国社会经济的迅速发展,能源紧缺、环境污染等现实问题日趋严峻。 在可持续发展的背景下,我国对太阳能、风能等可再生清洁能源的投入不断扩[1-2]。 在高压输电技术方面,基于模块化多电平换流器(modular multilevel converter, MMC)的高压直流输电技术在最近几年得到了社会的广泛关注。它由德国学者Lesnicar 和Marquard 提出[3],是在基于电压源(voltage source converter, VSC)换流器型高压直流输电(high voltage direct, HVDC)技术基础上发展起来的新型拓扑结构,并在本世纪初由西门子公司首先进行商业化运作[4-6]。 VSC-HVDC 换流阀串联了上百个开关器件,使得器件存在动静态均压问题,同时器件开关频率高,电流谐波含量大,占地面积广。 MMC-HVDC 解决了VSC-HVDC 存在的问题,能很好地改善电能的质量与系统的稳定性,在并网、海上钻井平台和城市电网供电等方面都具备良好的技术优势[7-8]。
但MMC 由于自身高度模块化的特点,也会使得三相桥臂存在着相间环流,从而增加了系统的损耗,扩大了成本,降低了器件的使用寿命,对系统的安全运行更是造成了严重影响[9-10]。 传统的模块化多电平换流器的环流抑制控制器对环流抑制效果都比较明显, 但是它们在设计环流抑制系统中均采用了锁相环(phase lock loop, PLL)结构,虽然锁相环精确地跟踪电网电压相位变化,能够达到有效控制系统性能的作用,但锁相环的存在也增加了系统的复杂程度。 本文在无锁相环结构的基础上,设计了一套新型的环流抑制数学模型,为环流抑制策略的研究提供一种新的思路。
1 MMC 基本运行原理
MMC 为三相桥臂结构,图1为MMC 的单相结构简图(j=a,b,c),其中udc为直流侧电压,idc为直流侧电流。单个子模块为半H 桥结构,u0为子模块输出电压,i0为流过子模块的电流。 T1与T2为IGBT,D1和D2为反并联在T1与T2两端的二极管。 C 为子模块电容,其输出电压为uc。 正常情况下,子模块运行在投入与切除这两种状态下。 uj1与uj2分别为j 相上下桥臂子模块的投入电压,R 和L 为桥臂上与子模块串联的电阻和电抗,ucirj1和ucirj2分别为j 相上下桥臂电流在R 和L 上的压降,ij1和ij2分别为j 相上桥臂与下桥臂的电流。 vcj为MMC系统j 相交流侧输出电压,R0和L0为交流侧等效电阻与电感,utj和itj分别为j 相交流侧的相电压和相电流。
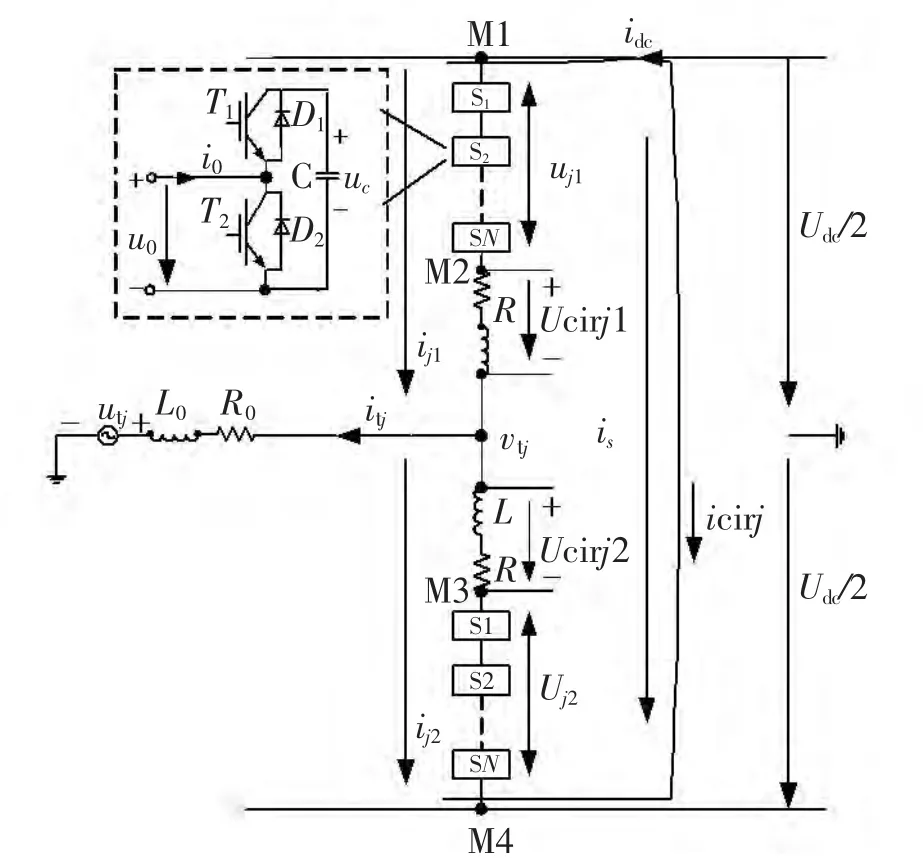
图1 MMC 简化结构图Fig.1 Simplified structure of MMC
2 环流的产生
理想情况下桥臂不存在环流,既icirj1=0。 根据基尔霍夫电流定律有:
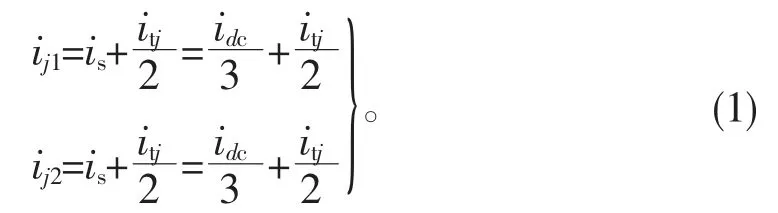
但是实际情况下,桥臂存在相间环流,即

因此,实际情况下直流侧电压关系式为

由于上下桥臂子模块电容电压在实际情况下难以均衡,因此icirj≠0。 所以MMC 的电压关系式为

3 环流抑制控制器设计
文献[1]介绍了无PLL 原理,这里不加分析直接给出αβ 两相静止坐标系与dq 同步旋转坐标系之间的转换关系式,即

式(4)和式(5)中的u*tα与u*tβ为标幺值,其计算方法如下:

式(6)中um为基波电压幅值。
MMC 的控制系统大多采用了锁相环结构。本文在PLL 稳定跟踪电网电压的情况下,利用式(4)与式(5)避免了PLL 结构的设计,从而使无锁相环控制器的实现成为可能。
MMC 三相桥臂环流在串联电感与电阻上产生的压降为

利用αβ 两相静止旋转坐标系转换为

式(8)中,uα与uβ分别为三相桥臂串联电阻与电抗上的压降在αβ 坐标系上的值,iα与iβ分别为三相桥臂环流在αβ 坐标系上的值。 利用式(4)即可将式(8)上的电压量与电流量转换到dq 同步旋转坐标系下,即

使用PI 控制器对式(9)进行独立解耦控制,即

式(10)中kp 与ki 为PI 控制器的比例和积分系数。 通过式(5)将式(10)中计算得到的u*d与u*q转换到αβ 两相静止坐标系中:

通过式(11)就能够得到三相桥臂环流在串联电阻与电感上电压的参考值。
4 无锁相环主控制电路设计
4.1 内环控制器设计
内环控制器的设计在传统PI 控制器调制方法的基础上,利用式(5)将所计算出的dq 坐标系上的电压参考值转化到αβ 两相静止坐标系中, 这样就可以避免使用锁相环结构提供的基准相位计算三相交流侧的电压参考值,从而达到无锁相环结构时设计内环控制器的目的,即
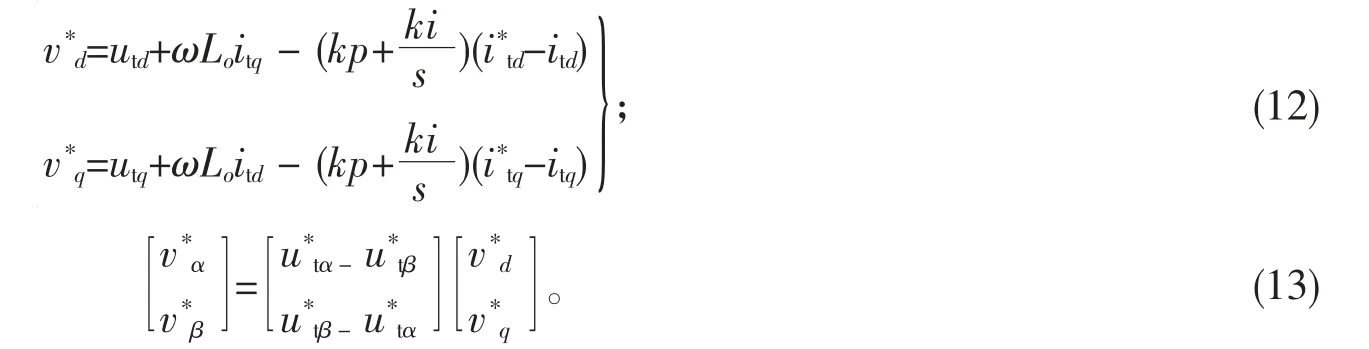
式(12)中v*d与v*q分别为三相交流侧电压在dq 同步旋转坐标中的参考值;i*td与i*tq为三相交流侧电流在dq同步旋转坐标中的参考给定值;itd与itq为三相交流侧电流在dq 同步旋转坐标系中的分量,通过式(12)与式(13),就可避免使用锁相环结构。而且由式(12)与(13)也可以看出,在无锁相环结构的情况下,内环控制器依然能够实现有功与无功的独立解耦控制。
4.2 外环控制器设计
MMC 外环控制器的设计通常有定直流电压、定有功功率、定无功功率和定交流电压这4 种方式。 由于MMC 通常运行在整流和逆变这两种状态,一般情况下,使用定直流电压、定有功功率和定无功功率这3 种方法来设计外环控制器,在无锁相环结构的情况下,外环控制器的数学模型为
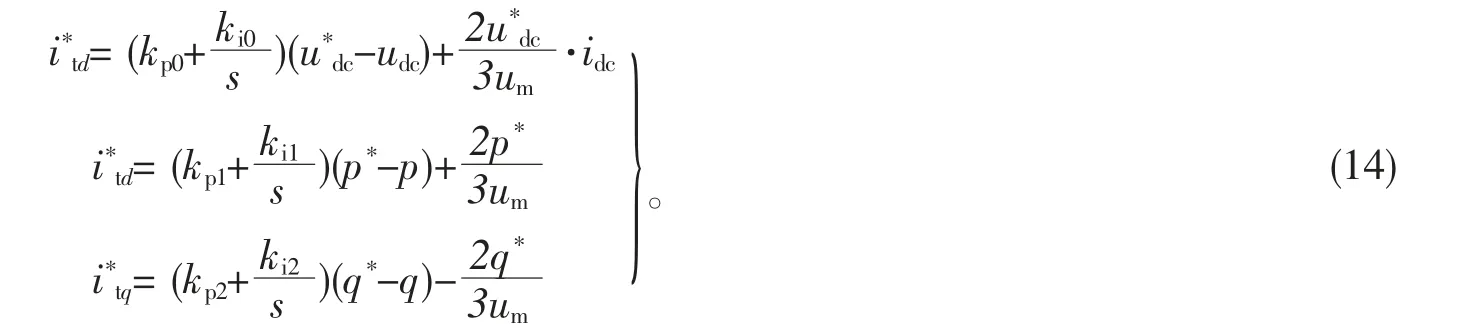
式(14)中kp0与ki0为定直流电压方法中PI 控制器的比例与积分系数;kp1与ki1为定有功功率方法中PI 控制器的比例与积分系数;kp2与ki2为定无功功率方法中PI 控制器的比例与积分系数。其中p 与q 为瞬时功率,它们的计算公式如下:

因此,MMC 的控制系统结构图见图2。
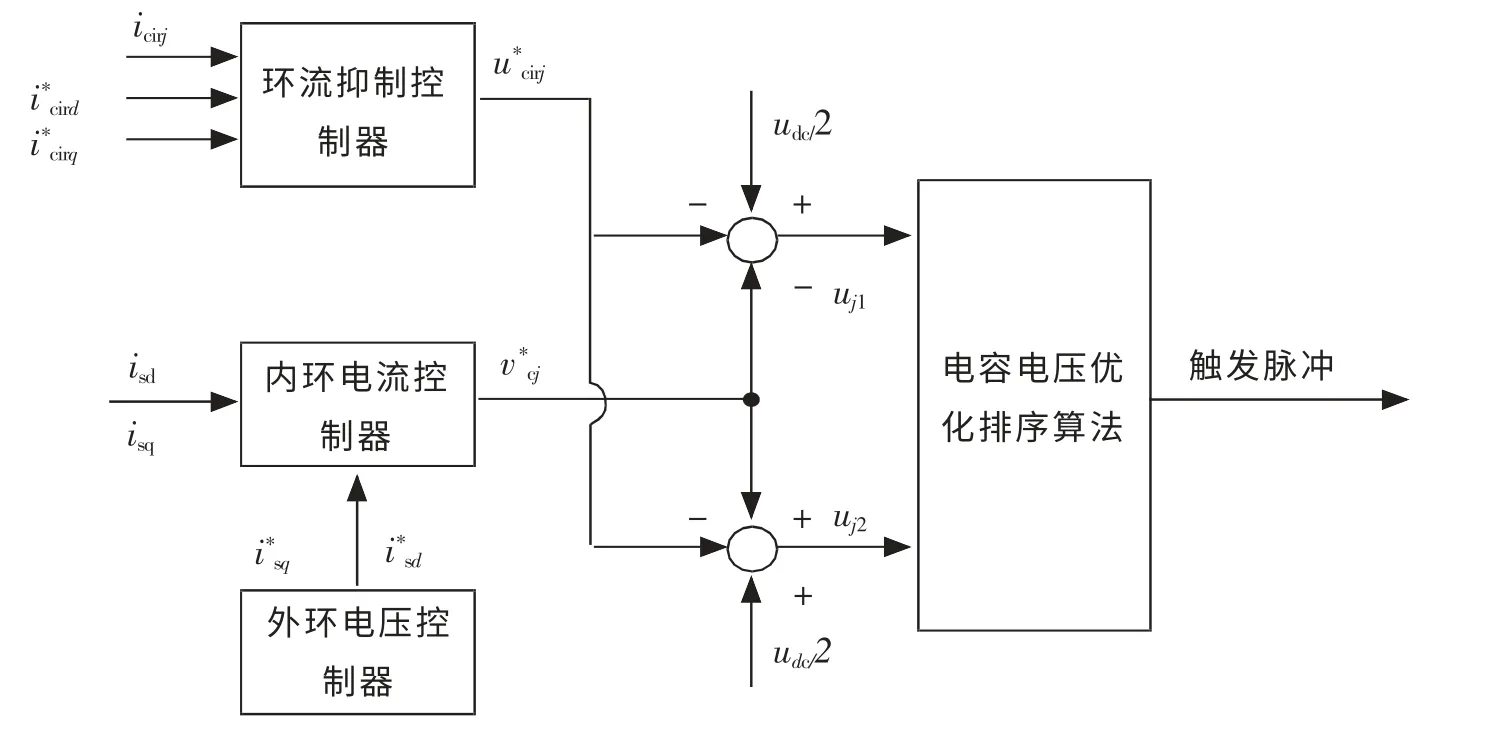
图2 MMC 控制系统结构图Fig.5 Control system structure of MMC
5 仿真结果分析
在Matlab/Simulink 上搭建每相100 个子模块的MMC 仿真系统, 其中整流站外环采用定直流电压控制和定无功功率控制,逆变站采用定有功功率和定无功功率控制。 系统的参数如表1所示。
图3为MMC 运行在整流状态下的无锁相环结构的系统仿真波形图。其中图(a)为MMC 系统交流侧三相线电压,0.2 s 启动环流抑制器后,三相线电压没有发生变化,可以看出桥臂环流未对交流侧电路产生影响。 图(b)为桥臂环流在桥臂电抗器上产生的压降,在0.2 s 之前,其峰值接近0.5 kV,在环流抑制控制器启动之后,压降明显减小,峰值在0 左右徘徊。 图(c)为A 相桥臂环流,0.2 s 之前桥臂环流很大,启动环流抑制控制器后,桥臂环流迅速减小。 图(d)为A 相上桥臂电压,由于桥臂环流的影响,0.2 s前,A 相上桥臂电压峰值很大, 增大了器件的容量对器件安全运行造成了影响, 启动环流抑制控制器后,上桥臂电压峰值降低,对器件的保护、系统的安全运行有一定帮助。 图(e)为A 相上桥臂电流,启动环流抑制控制器后,桥臂的畸变明显减小。

表1 仿真系统参数Tab.1 Parameters of simulation system
图4为MMC 系统运行在逆变站的波形图。逆变站的情况与整流站相似,图(a)中三相交流侧线电压在环流抑制控制器启动前后也未产生任何变化,这是因为桥臂环流只对MMC 系统内部产生影响,对交流侧的外电路不产生影响,无论MMC 运行在哪种状态下,三相交流侧的线电压都不变。 图(b)为A 相桥臂环流在电抗器上的压降,在环流控制器启动之前,压降峰值达到10 kV,启动环流抑制控制器,峰值逼近为0。 图(c)为A 相桥臂环流,0.2 s 之后,桥臂环流明显降低。 图(d)为A 相上桥臂电压,环流抑制控制器启动前后,电压峰值减小并趋于稳定。图(e)为A 相上桥臂电流,0.2 s 前后,桥臂电流的畸变迅速降低。
由图3和图4可以看出,使用无锁相环设计的环流抑制控制器,既可以在整流站使用,也可以运用于逆变站。 该环流抑制控制器的设计对桥臂环流的减小有明显效果。
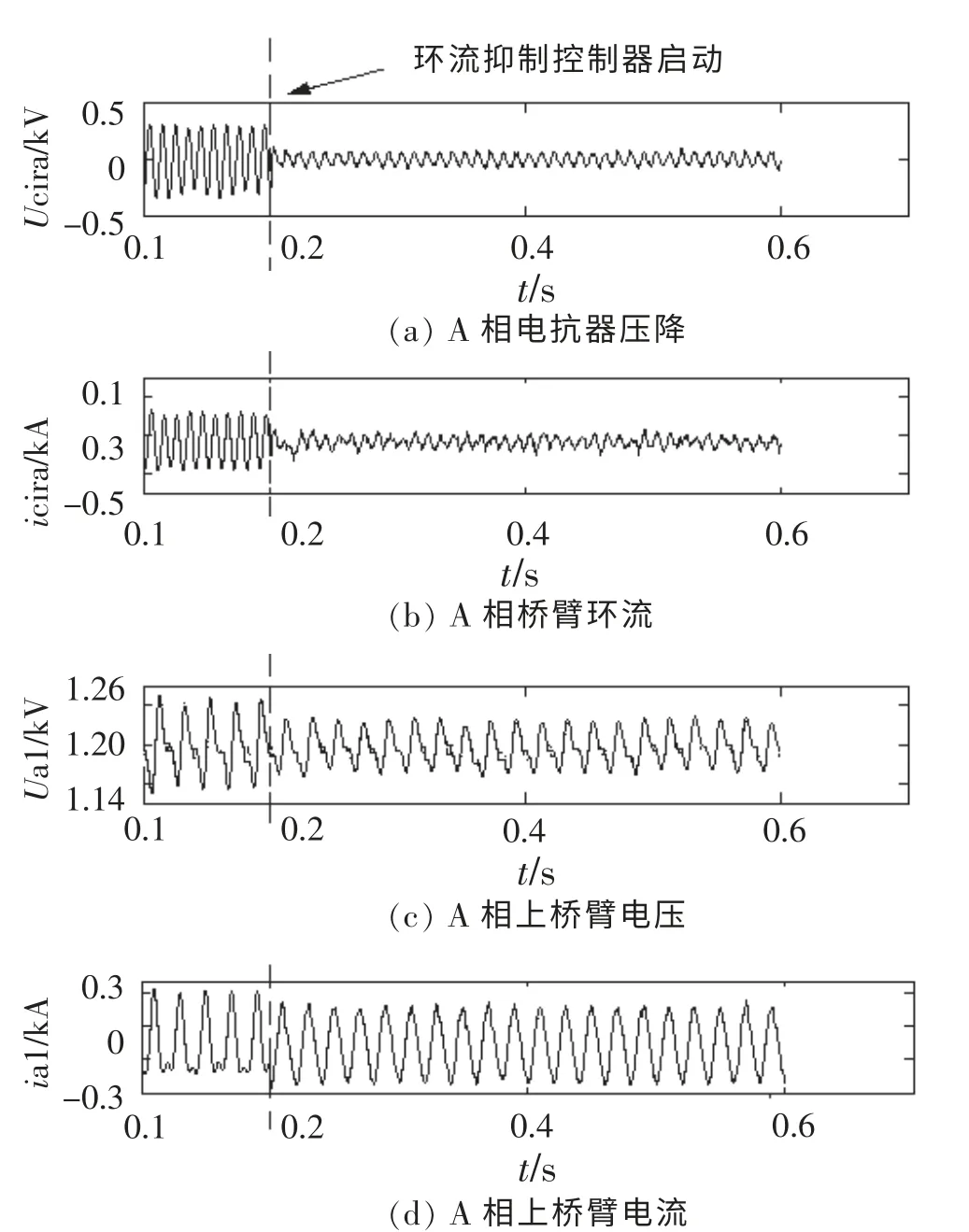
图3 MMC 整流站波形图Fig.3 Rectifier station waveform of MMC
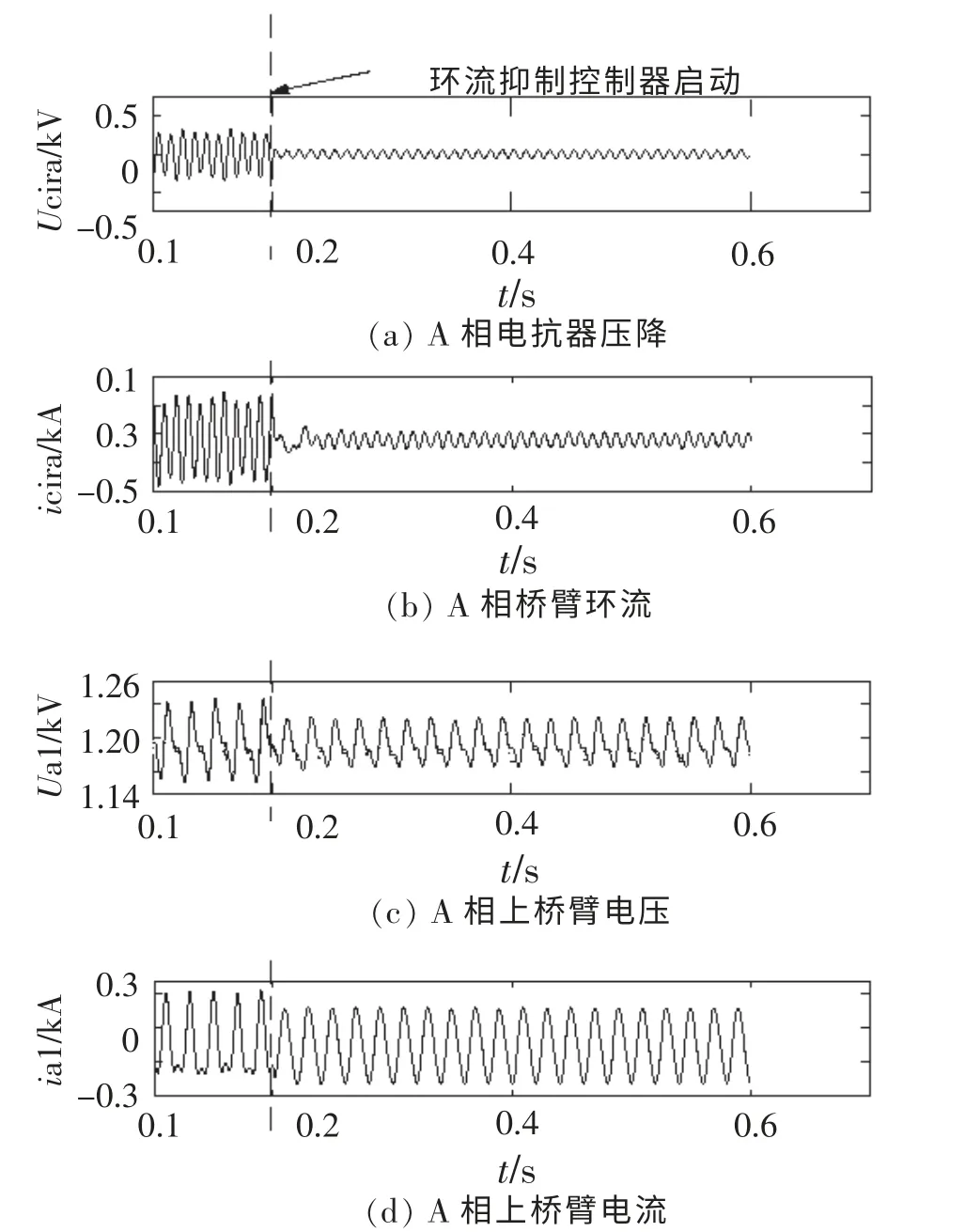
图4 MMC 逆变站波形图Fig.4 Inverter station waveform of MMC
6 结论
通过分析MMC 的基本原理和MMC 控制系统数学模型的推导, 设计出无锁相环结构的MMC 控制系统,该系统不仅满足MMC 主控制电路设计,也能够运用于MMC 环流抑制控制器的设计。
MMC 无锁相环结构控制系统的设计,不仅减少了系统的参数选取,而且也能够实现系统有功、无功的独立解耦控制。 通过仿真结果分析,证明了设计的环流抑制控制器的有效性,为MMC 系统的稳定运行提供了一种新的思路。在需求不断扩大的今天,无锁相环结构的环流抑制控制器的设计,很好满足了社会多样化的需求,具备一定的工程实用价值。
[1] 李云丰,宋平岗,王立娜.模块化换流器无锁相环控制策略[J].电测与仪表,2014,51(5): 56-60.
[2] 阎发友,汤广福,贺之渊,等.一种适用于模块化多电平换流器的新型环流控制器[J].电力系统自动化, 2014,38(1): 104-108.
[3] 赵成勇,李探,俞露杰,等.MMC-HVDC 直流单极接地故障分析与换流站故障恢复策略[J].中国电机工程学报,2014,34(21):3518-3526.
[4] 屠卿瑞,徐政,郑翔,等.模块化多电平换流器型直流输电内部环流机理分析[J].高电压技术,2010,36(2): 547-552.
[5] 王珊珊,周孝信,汤广福,等.模块化多电平电压源换流器的数学模型[J].中国电机工程学报,2011,31(24): 1-8.
[6] 张建坡,赵成勇.模块化多电平换流器环流及其抑制策略研究[J].电工技术学报,2013,28(10): 328-336.
[7] 赵昕,赵成勇,李光凯,等.采用载波移相技术的模块化多电平换流器电容电压平衡控制[J].中国电机工程学报,2011,31(21): 48-55.
[8] 周月宾,江道灼,郭婕,等.模块化多电平换流器直流输电系统的启停控制[J].电网技术,2012,36(7):204-209。
[9] 王朝明,王华广,王晴.基于双PI 控制器的模块化多电平变换器环流抑制策略[J].电网技术,2014,38(10): 2905-2912.
[10] 段程婷,宋平岗,李云丰,等.MMC 无锁相环直接功率控制[J].华东交通大学学报,2014,31(5): 69-76.
