球笼式万向节钢球径向位移的解析及保持架窗孔的设计
2015-07-26石宝枢郭常宁
石宝枢,郭常宁
(1.浙江众达传动股份有限公司,浙江 金华 321025;2.上海交通大学 机械工程与动力学院,上海 200240)
符号说明
B——球笼式保持架每一矩形窗孔的工作宽度,mm
B1——球笼式保持架每一矩形窗孔的宽度,mm
D——星形套和钟形壳通过各自沟道中心的钢球中心圆直径,mm
Dw——钢球直径,mm
d——钢球在沟道内沿一个方向的径向位移量,mm
dmax——钢球在沟道内沿一个方向的径向位移量的最大值,mm
dZ——钢球在沟道内沿2个方向的径向最大位移总量,mm
e——星形套和钟形壳的各自沟道中心至球面中心(两轴交点)的距离,mm
L——球笼式保持架每一矩形窗孔的长度,mm
L0——球笼式保持架每一矩形窗孔的理论长度,mm
L1——球笼式保持架每一矩形窗孔的工作长度,mm
r——星形套通过其沟道中心的沟道底部圆弧半径,mm
R——钟形壳通过其沟道中心的沟道底部圆弧半径,mm
R1——球笼式保持架的内球面(星形套的外球面)直径,mm
R2——球笼式保持架的外球面(钟形壳的内球面)直径,mm
R3——星形套(或钟形壳)通过各自沟道中心的钢球中心圆半径,mm
R4——钢球中心至球面中心(两轴交点)的距离,mm
α——输入轴与输出轴(绕两轴交点)之间的转角,(°)
αmax——输入轴与输出轴(绕两轴交点)之间转角的最大值,(°)
α1——球笼式保持架相对于输出轴(钟形壳)的转角,(°)
α2——球笼式保持架相对于输入轴(星形套)的转角,(°)
εB——球笼式保持架每一矩形窗孔工作宽度的精加工余量,mm
εL——球笼式保持架每一矩形窗孔长度的加长值,mm
球笼式万向节中的若干个沿圆周均布的钢球,在其相应的星形套和钟形壳沟道内运动为同时沿轴向滚动和径向移动的复合运动。该万向节的球笼式保持架的作用:夹持钢球,引导输入轴(星形套)和输出轴(钟形壳)的转角。若每一钢球在其相应的星形套和钟形壳沟道内沿轴向滚动,则球笼式保持架每一矩形窗孔的工作宽度(轴向方向)必与相应的钢球直径相等;若每一钢球在其相应的星形套和钟形壳沟道内,沿径向(球笼式保持架矩形窗孔的长度方向)移动,则球笼式保持架每一矩形窗孔的长度必大于相应的钢球直径,以确保球笼式万向节的输入轴(星形套)和输出轴(钟形壳)转角时,每一钢球均有足够的活动空间。而如何合理、精确地设计和计算球笼式保持架的每一矩形窗孔,要根据球笼式万向节的结构特征和运动机理,对每一钢球在其相应的星形套和钟形壳沟道内,沿径向位移量进行系统的解析。
1 球笼式万向节的结构特征
球笼式万向节工作部分的结构如图1所示,其主要由与输入轴连接的星形套、与输出轴连接的钟形壳、夹持钢球并引导上述两轴转角的球笼式保持架和若干个沿圆周均布的传力钢球等组成[1]。
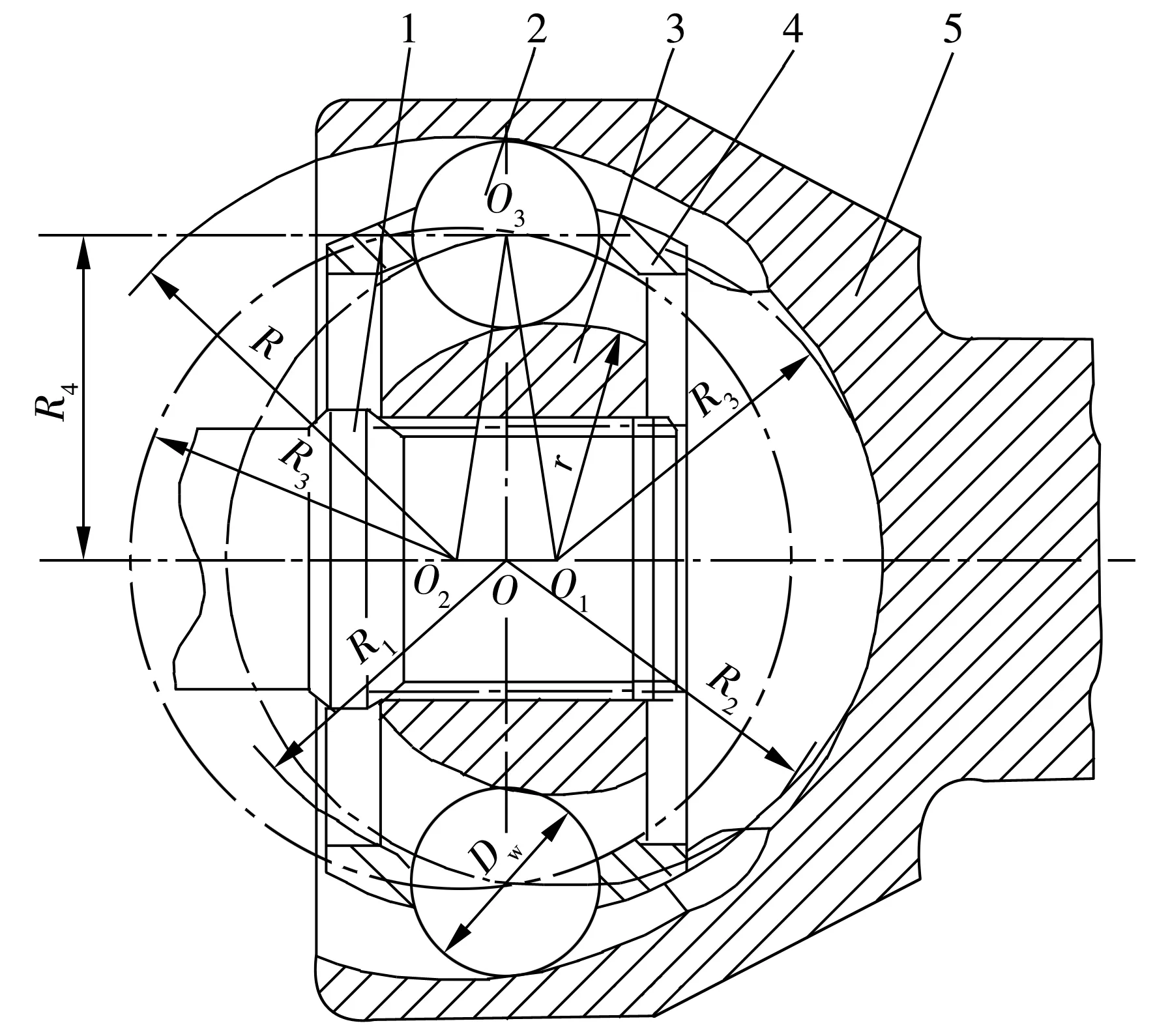
1—传动轴(输入轴);2—钢球;3—星形套(内沟道);4—保持架;5—钟形壳(外沟道、输出轴)
该万向节工作部分的结构特征是:星形套的外球面与相应的球笼式保持架的内球面配合、钟形壳的内球面与相应的球笼式保持架的外球面配合,4个内、外球面组成了2组绕同一球面中心转动的球面副,该球面中心与输入轴(星形套)和输出轴(钟形壳)两轴的交点重合。用于传力的钢球一般为6~8个;相应地,球笼式保持架亦有相同数量且沿圆周方向均布的矩形窗孔,用于夹持钢球、引导两轴的转角,球笼式保持架每一矩形窗孔沿轴向方向的两侧壁(矩形窗孔的工作宽度)均与相应的钢球过盈配合,当两轴转角时,每一矩形窗孔的长度确保了每一钢球在相应的内、外沟道沿径向有足够的活动空间;在星形套的外球面上,均设计相同数量、沿圆周方向均布、素线为圆弧形、通过其沟道中心的截面形状为关于钢球中心对称的双偏心圆弧形(或椭圆形)的外沟道;同样,在钟形壳的内球面上,亦均设计相同数量、沿圆周方向均布、素线为圆弧形、通过其沟道中心的截面形状为关于钢球中心对称的双偏心圆弧形(或椭圆形)的内沟道。上述的内、外沟道均分别与相应的钢球共轭接触,使球笼式万向节在输入轴(星形套)和输出轴(钟形壳)有一定的角位移等复杂工况下,仍能平稳、可靠、灵活、精确地传递运动和转矩。球笼式万向节工作部分另一个显著的结构特征是:星形套、钟形壳的沟道中心均与各自的外球面、内球面中心(两轴交点)距离(称偏心距)相等,且分别置于球面中心(两轴交点)的两侧。
2 两轴转角时的运动机理
当输入轴(星形套)相对于输出轴(钟形壳)绕球面中心(两轴交点)转角时,球笼式万向节的运动情形如图2所示。设两轴的交点为O,星形套的沟道中心为O1,钟形壳的沟道中心为O2。则星形套通过其沟道中心的钢球中心圆半径为

图2 球笼式万向节两轴的转角
(1)
钟形壳通过其沟道中心的钢球中心圆半径为
(2)
因O1O=O2O=e,则星形套(或钟形壳)通过各自沟道中心的钢球中心圆半径又为
(3)
由于球笼式万向节是通过球笼式保持架的内、外球面,分别与相应的星形套外球面、钟形壳内球面配合。这样,在结构上保证了该万向节的输入轴(星形套)和输出轴(钟形壳)均绕O点转动。
设球笼式万向节的输入轴(星形套)绕O点相对于输出轴(钟形壳)的转角为α,球笼式保持架绕O点相对于输出轴(钟形壳)的转角为α1;相对于输入轴(星形套)的转角为α2。
以O点为坐标原点,建立关于输出轴(钟形壳)的平面直角坐标系Oxy;仍以O点为坐标原点,建立关于球笼式保持架的平面直角坐标系Ox2y2。由坐标轴的旋转得[2]
(4)
(4)式可转化为[3]
(5)
以O点为坐标原点,建立关于输入轴(星形套)的平面直角坐标系Ox1y1,则有
(6)
球笼式万向节的上述各转角间的关系为
α1=α-α2。
(7)
设球笼式万向节沿圆周均布的每一钢球在其相应的星形套和钟形壳沟道内,沿径向(球笼式保持架矩形窗孔的长度方向)一个方向的位移为d,则某钢球的中心O3在Ox2y2坐标系中的坐标分别为
x2=0,
(8)
y2=R4-d,
(9)
该钢球的中心O3在Oxy坐标系中的坐标分别为
(10)
即有
x=(R4-d)sinα1,
(11)
y=(R4-d)cosα1,
(12)
该钢球的中心O3在Ox1y1坐标系中的坐标分别为
(13)
即有
x1=-(R4-d)sinα2,
(14)
y1=(R4-d)cosα2。
(15)
球笼式万向节在其极限转角范围内的任何情况下,沿圆周均布的每一钢球均必须与相应的星形套、钟形壳沟道相切。所以,在这个极限转角范围内,该万向节的钢球中心O3至相应的星形套沟道中心O1和钟形壳沟道中心O2的距离R3始终相等且保持不变。所以有
(16)
(17)
将(11),(12)式代入(16)式,整理得
(18)
将(14),(15)式代入(17)式,整理得
(19)
由(18)式、(19)式可得
sinα2=sinα1,
(20)
即α2=α1,
(21)
由此可得y1=y,也就是说,球笼式万向节在极限转角范围内,沿圆周均布的每一钢球的中心至输入轴(星形套)和输出轴(钟形壳)的距离始终相等且保持不变,在这个转角范围内,可确保该万向节始终等角速地传递运动和转矩。
将(21)式代入(7)式,得
(22)
由此可知,球笼式万向节的球笼式保持架的轴线,始终处于输入轴(星形套)和输出轴(钟形壳)两轴夹角的等分线上。换言之,球笼式万向节沿圆周均布的若干个钢球中心所在的平面,始终处于输入轴(星形套)和输出轴(钟形壳)两轴夹角的等分面上,即球笼式万向节中球笼式保持架的转角始终等于输入轴(星形套)和输出轴(钟形壳)两轴转角的一半。这是球笼式万向节重要的运动机理(或结构原理)之一。
3 钢球径向位移的解析
根据上述球笼式万向节的结构特征和两轴转角时的运动机理,可对该万向节沿圆周均布的任一钢球,在其相应的星形套和钟形壳沟道内,沿径向(球笼式保持架矩形窗孔的长度方向)其中一个方向的位移量进行求解。
将(3)式代入(18)式,经整理得
d2-2(esinα1+R4)d+2eR4sinα1=0,
(23)
则球笼式万向节沿圆周均布的每一钢球在其相应的星形套和钟形壳沟道内,沿径向(球笼式保持架矩形窗孔的长度方向)其中一个方向的位移量为

(24)

(25)
由此可得,球笼式万向节沿圆周均布的每一钢球在其相应的星形套和钟形壳沟道内,沿径向(球笼式保持架矩形窗孔的长度方向)其中一个方向的最大位移量为
(26)
由于球笼式万向节的最大转角为输入轴(星形套)和输出轴(钟形壳)绕两轴的交点沿顺时针、逆时针的2个方向,两转角的极限值为
αmax-(-αmax)=2αmax。
显然,球笼式万向节沿圆周均布的每一钢球在其相应的星形套和钟形壳沟道内,沿径向(球笼式保持架矩形窗孔的长度方向)2个方向的最大位移总量为
dZ=2dmax,
(27)
将(26)式代入(27)式,经整理得
(28)
4 球笼式保持架窗孔的设计
球笼式万向节的球笼式保持架每一矩形窗孔的典型结构如图3所示,因钢球在沟道内的径向位移量与球笼式保持架每一矩形窗孔的几何形状和尺寸密切相关,根据上述的推导,即可对该矩形窗孔进行设计计算。

图3 保持架的窗孔
4.1 矩形窗孔的宽度
球笼式保持架每一矩形窗孔的轴向方向(窗孔宽度)与相应的钢球为过盈配合,以确保钢球在其相应的星形套和钟形壳沟道内滚动。所以,球笼式保持架每一矩形窗孔的工作宽度与相应钢球的公称直径应相等,即
B=Dw。
(29)
球笼式万向节沿圆周均布的每一钢球与相应的球笼式保持架每一矩形窗孔轴向配合的过盈量一般为0.01~0.03 mm。所以,球笼式保持架每一矩形窗孔的工作宽度B的实际尺寸较相应的钢球直径Dw的公称值小0.01~0.03 mm。
通常,球笼式保持架每一矩形窗孔的加工过程为:冲窗孔→铣(或拉)窗孔→磨窗孔。显然,球笼式保持架的每一矩形窗孔的宽度B1应是工作宽度B再减去其精加工余量,即
B1=B-εB,
(30)
式中:εB=0.7~1.5 mm。
4.2 矩形窗孔的长度
球笼式万向节在两轴转角时,沿圆周均布的每一钢球,在相应的星形套和钟形壳沟道内不仅沿轴向滚动,在径向上还要沿球笼式保持架矩形窗孔的长度方向移动。显然,每一矩形窗孔的理论长度应等于相应的钢球直径(矩形窗孔的工作宽度)与该钢球在沟道内沿径向2个方向的位移总量之和,即
L0=Dw+dZ。
(31)
但是,为使球笼式万向节沿圆周均布的每一钢球在其相应的星形套和钟形壳沟道内,沿径向(球笼式保持架矩形窗孔的长度方向)有足够的活动空间,同时,考虑到球笼式保持架矩形窗孔的制造精度,在窗孔长度设计时,亦应有一窗孔长度加长值εL。故球笼式保持架每一矩形窗孔的长度为
L=Dw+dZ+εL。
(32)
将(28)式代入(32)式得
(33)
一般αmax=47°;εL=1~2 mm。
4.3 矩形窗孔的工作长度
理论上,球笼式万向节的球笼式保持架每一矩形窗孔的长度包含了夹持钢球长度(即钢球直径或矩形窗孔的工作宽度),但实际工作时不含夹持钢球长度,又考虑到球笼式保持架每一矩形窗孔的对称性及制造精度,其工作长度应加上一窗孔长度加长值εL。因此,球笼式保持架每一矩形窗孔的工作长度为
L1=L-Dw+εL,
(34)
将(33)式代入(34)式,得
(35)
一般αmax=47°;εL=1~2 mm。
5 设计计算举例
[例]某球笼式万向节,已知的相关参数为:Dw=18.256 mm;D=64.5 mm;e=4.8 mm;εB=0.8 mm;εL=1.5 mm;αmax=47°。试设计计算该球笼式保持架每一矩形窗孔的各结构参数。
解:将已知的相关参数代入(29),(30),(33)和(35)式,得该球笼式保持架每一矩形窗孔结构参数为:B=18.256 mm,B1=17.5 mm,L=23.5 mm,L1=6.7 mm。
6 结束语
通过对球笼式万向节两轴转角的运动分析,系统、精确地解析出该万向节沿圆周均布的每一钢球在其相应的星形套和钟形壳沟道内的径向位移量,为合理、精确、创新地设计球笼式保持架的矩形窗孔提供了可靠的理论依据。
