多传感器数据融合技术研究与展望
2015-07-18周鹏
周鹏
摘 要:多传感器数据融合是近年来的一个热点研究方向,具有广阔的应用前景。介绍了数据融合的概念与主要特点,总结了常用的数据融合过程与系统结构,以及几种经典的多传感器数据融合算法,介绍了多传感器数据融合技术的应用方向,并对未来的技术发展方向进行了展望。
关键词:多传感器;数据融合;结构;算法
中图分类号:TP274 文献标识码:A 文章编号:2095-1302(2015)05-00-03
0 引 言
随着电子信息技术的快速发展,各种大型电子系统不断涌现,其应用背景不断趋于复杂化,其功能实现需要各种多传感器数据系统支持,因此需要对各种不同的传感器和不同的信息源进行更加有效的融合集成。同时,随着现代战争的发展,多传感器数据融合技术在军事方面的作用愈加凸显,它结合利用了多种不同传感器的特点,可以多方位多角度获取目标不同类型的信息,提高C3I系统在各维度上的覆盖范围,提高对目标的检测和识别能力[1]。经过多年发展,多传感器数据融合技术已取得了长足的进步。在融合层级方面,形成了数据级融合、特征级融合与决策级融合三种层级。在系统结构方面,提出了集中式、分散式、分布式和混合式结构;在融合算法方面形成了加权平均方法、神经网络法、Kalman滤波法、贝叶斯估计法、D-S证据理论等算法。在应用方面,多传感器数据融合已广泛应用于军用和民用领域并取得了显著的效果。本文介绍了多传感器数据融合的过程和主要特点,总结了常用的数据融合系统结构与算法,概括了多传感器数据融合技术的应用情况,并针对现存问题对未来技术发展方向进行了展望。
1 融合模型
1.1 多传感器数据融合的一般过程
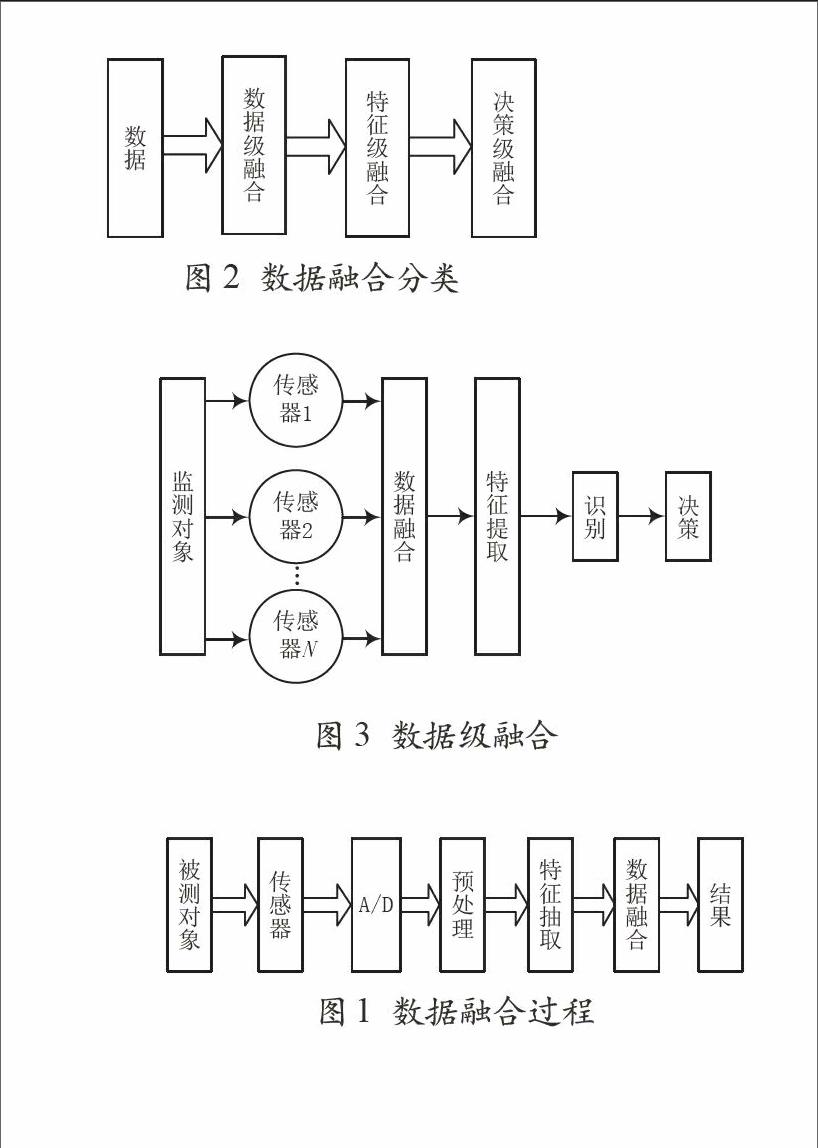
多传感器数据融合的一般过程大致如图1所示,首先传感器将测量环境中的被测对象转换为电信号,然后经过A/D变换将电信号转换为数字信号。数字信号经过预处理滤除干扰和噪声,再经过特征抽取后进行数据融合,最后输出融合结果。
图1 数据融合过程
1.2 多传感器数据融合的类别
数据融合通常可以根据处理阶段层次的不同分为数据级融合、特征级融合与决策级融合[2],如图2所示。
图2 数据融合分类
(1)数据级融合
数据级融合是在各传感器原始数据的基础上进行的底层融合,如图3所示。数据级融合的优点是能够尽可能多地保持原始数据中的信息;缺点是数据量大、运算开销大,同时原始数据具有不确定性和不完全性。
图3 数据级融合
(2)特征级融合
特征级融合指的是首先对各个传感器的原始信息进行特征提取,然后再对特征信息进行融合的处理过程。特征级融合的优点在于通过对各传感器原始数据的处理实现了信息优选,降低了实时处理的压力。特征级融合是目前在实时系统中应用最为广泛的融合方式。特征级融合如图4所示。
(3)决策级融合
决策级融合的融合对象是对目标特征进行识别后的决策信息,直接为指挥控制决策提供依据,属于高层级融合。所以决策级融合应该从具体问题的需求出发,充分利用数据级融合和特征级融合所产生的目标的各类特征信息,利用一定的算法来实现。决策级融合的优点:实时性好、能有效反映出目标各不同类型的信息、具有一定的容错性,对传感器的依赖降低,具有较高的灵活性。决策级融合如图5所示。
图4 特征级融合
图5 决策级融合
1.3 数据融合的处理体系结构
多传感器数据融合处理在实现过程中通常具有分布式、集中式和混合式三种体系结构[3]。
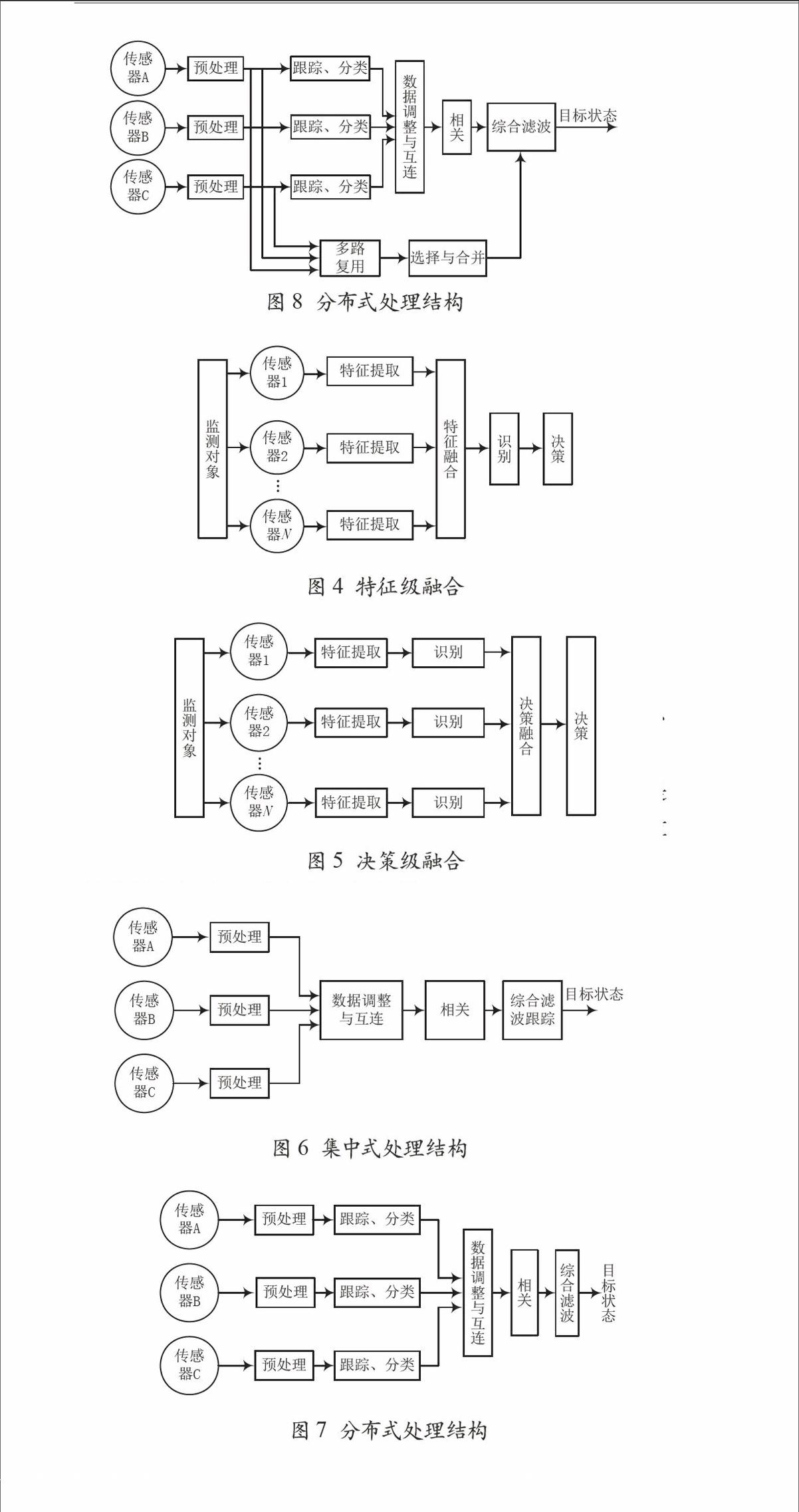
集中式结构适合处理来自传感器的原始数据,其优点是数据信息损失较小,但对系统通信能力要求较高,融合计算的负担较重。集中式结构如图6所示。
图6 集中式处理结构
分布式结构适合处理的是经过一定预处理流程的数据,其特点是代价较低、通信量较小等。分布式结构如图7所示。
图7 分布式处理结构
混合式结构在实际应用中,常常采用混合式系统结构。混合式的融合系统保留了前两种系统的优点,但是其在通信和计算中代价较大。分布式结构如图8所示。
图8 分布式处理结构
1.4 融合方法
在多传感器数据融合系统中,需要大量采用各种数据融合方法对系统中的各类传感器数据进行有效处理。根据不同的应用背景需求,多传感器数据融合算法也多种多样,主要的融合方法有[4]:
(1)加权平均法
加权平均方法是最简单的数据融合算法,该方法对传感器数据进行加权平均,即得到融合结果。
(2)神经网络法
基于神经网络的多传感器数据融合算法通过利用大量具有非线性映射关系的神经元将数据信息转换为知识库;同时,可以自动进行知识获取及联想推理,能够将不确定的复杂数据经过学习与推理融合为系统能处理的数据。同时,神经网络可以大规模并行处理信息,处理速度较快。
(3)Kalman滤波法
Kalman滤波也是一种应用很广的数据融合方法。经典的Kalman滤波算法能在线性系统且误差为高斯白噪声模型的情况下得到统计意义下的唯一最优估计值。扩展的Kalman滤波算法与基于强跟踪的Kalman滤波可应用于非线性系统及系统模型或系统状态有变化的情况。
(4)贝叶斯估计法
贝叶斯估计法也是数据融合中一种常用方法,通过使用概率密度函数表示源信息,对融合信息进行优化处理,使传感器信息按概率关系组合,以条件概率表示其测量不确定性。
(5)D-S证据理论
D-S证据理论是贝叶斯估计法的扩展。贝叶斯估计法需要事先给出先验概率,而D-S证据理论则能够在缺乏先验信息的条件下使信息明朗化,是一种不精确推理理论。
2 多传感器数据融合的应用情况
多传感器数据融合应用分为军用和民用两大类[5]。
在军事领域中,多传感器数据融合广泛用于各种军事目标的探测、定位与跟踪识别。上世纪70年代美军就开发了具有数据融合功能的声纳信号处理系统,上世纪80年代美国将C3I系统中的数据融合技术列为重点开发的二十项关键技术之一,1991年美国已将五十多个数据融合系统引入到军用电子系统中。
民用领域的应用主要有智能机器人、智能制造、智能交通、医疗诊断、遥感、刑侦和保安等。智能机器人可以代替人进行智能加工、状态监测和故障诊断等;在智能交通系统中可以实现交通工具的无人驾驶;在医疗诊断中将多传感器的数据融合可以得到更准确的诊断结果;在遥感领域中可以通过融合遥感图像来提高分类的准确性;在刑侦中可以利用多传感器数据进行武器、毒品等的检查并将人体的各种生物特征融合,大幅度提高对人的身份识别认证能力。
3 研究展望
多传感器数据融合技术已经成功地应用于军民多种领域,但仍有大量理论和实际问题需要解决。
(1)多源异类传感器信息融合技术。多源异类多传感器信息融合具有很大难度,如何利用各个不同种类传感器的位置、动态及特征和属性参数,联合优化目标检测跟踪性能是需要进一步研究的问题。
(2)传感器资源分配和管理研究。包括根据传感器性能、位置和工作时间、探测范围等研究多传感器的资源组合和任务分配以及控制策略等。
(3)系统评估方法。需要研究建立实用地评估体系,包括系统指标体系和算法体系,从而对整个融合过程进行实验分析和比较研究。
(4)网络化复杂融合系统的研究。对于目前在军事信息领域以及民用的金融证券等领域,仅靠单一的融合系统不能解决问题。如何在网络环境下,结合大数据、云计算、物联网等新技术对多传感器数据进行挖掘和融合形成决策,是下一步需要研究的重点问题。
4 结 语
本文通过对现有数据融合过程和主要特点进行总结,对一些经典的多传感器数据融合算法和数据融合技术的应用情况进行了介绍,并对未来的发展方向做出展望,为广大科研工作者在数据融合方面进行进一步的研究提供了参考和借鉴。
参考文献
[1]何友,关欣,王国宏. 多传感器信息融合研究进展与展望[J].宇航学报,2005,26(4):524-529.
[2]黄漫国,樊尚春,郑德智,等. 多传感器数据融合技术研究进展[J]. 传感器与微系统,2010,29(3):5-8.
[3]潘泉,于昕,程咏梅. 信息融合理论的基本方法与进展[J].自动化学报,2003,29(4):599-615.
[4]王欣. 多传感器数据融合问题的研究[D].长春:吉林大学,2006.
[5]田雪怡. 多传感器数据关联与航迹融合技术研究[D].哈尔滨:哈尔滨工程大学,2012.
